
一种多功能爬壁喷漆机器人.pdf

宜然****找我


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多功能爬壁喷漆机器人.pdf
一种多功能爬壁喷漆机器人,包含喷漆装置和弹性车轮;所述的喷漆装置包含主旋转缸、机械臂、副旋转缸、主喷漆喷头、伸缩缸和副喷漆喷头;所述的弹性车轮包含车轮本体、连接板、弹簧连接杆和支撑座;所述的爬壁喷漆机器人不但能够保障其所有驱动轮有效的附着在不规则的作业面上,避免其驱动力及附着力受到影响,而且其还能够在大面积工况或复杂工况环境中有效的完成喷漆作业,还不需要再进行人工补漆。

一种安全稳定的多功能爬壁喷漆机器人.pdf
一种安全稳定的多功能爬壁喷漆机器人,包含喷漆装置和弹性车轮;所述的喷漆装置包含主旋转缸、机械臂、副旋转缸、主喷漆喷头、伸缩缸和副喷漆喷头;所述的弹性车轮包含车轮本体、连接板、弹簧连接杆和支撑座;所述的车轮本体包含车轮壳、车轮端盖、防爆插头和惰性气体管接口;所述的爬壁喷漆机器人能够保障其所有驱动轮有效的附着在不规则的作业面上,避免其驱动力及附着力在作业中受到影响,其还能够在大面积工况或复杂工况环境中有效的完成喷漆作业,且不需要再进行人工补漆,同时,所述爬壁喷漆机器人还能够在无需安装防爆盒的前提下,安全有效的

一种稳定型爬壁喷漆机器人.pdf
一种涉及爬壁机器人领域的稳定型爬壁喷漆机器人,包含弹性车轮和旋转喷头;所述的弹性车轮包含车轮本体、连接板、弹簧连接杆和支撑座;所述的旋转喷头包含机械臂、主旋转缸、伸缩缸、副旋转缸和喷漆喷头;所述的爬壁喷漆机器人不但能够保障其驱动轮有效的附着在不规则的作业面上,达到避免其驱动力及附着力受到影响的目的,而且还能够通过喷漆喷头的旋转实施全方位喷漆作业,其非常适于推广应用。

一种具有弹性防爆车轮的爬壁喷漆机器人.pdf
一种具有弹性防爆车轮的爬壁喷漆机器人,包含防爆车轮和弹性连接结构;所述的防爆车轮包含车轮壳、车轮端盖、车轮驱动系统、防爆插头和惰性气体管接口;所述的弹性连接结构包含连接块、弹簧连接杆和支撑座;所述的爬壁喷漆机器人不但能够在不安装防爆盒的前提下在易燃易爆环境中安全灵活的进行作业,而且还能够保障其四个驱动轮有效的附着在不规则的作业面上,避免其驱动力及附着力受到影响。
一种曲面自适应磁吸附爬壁喷漆机器人.pdf
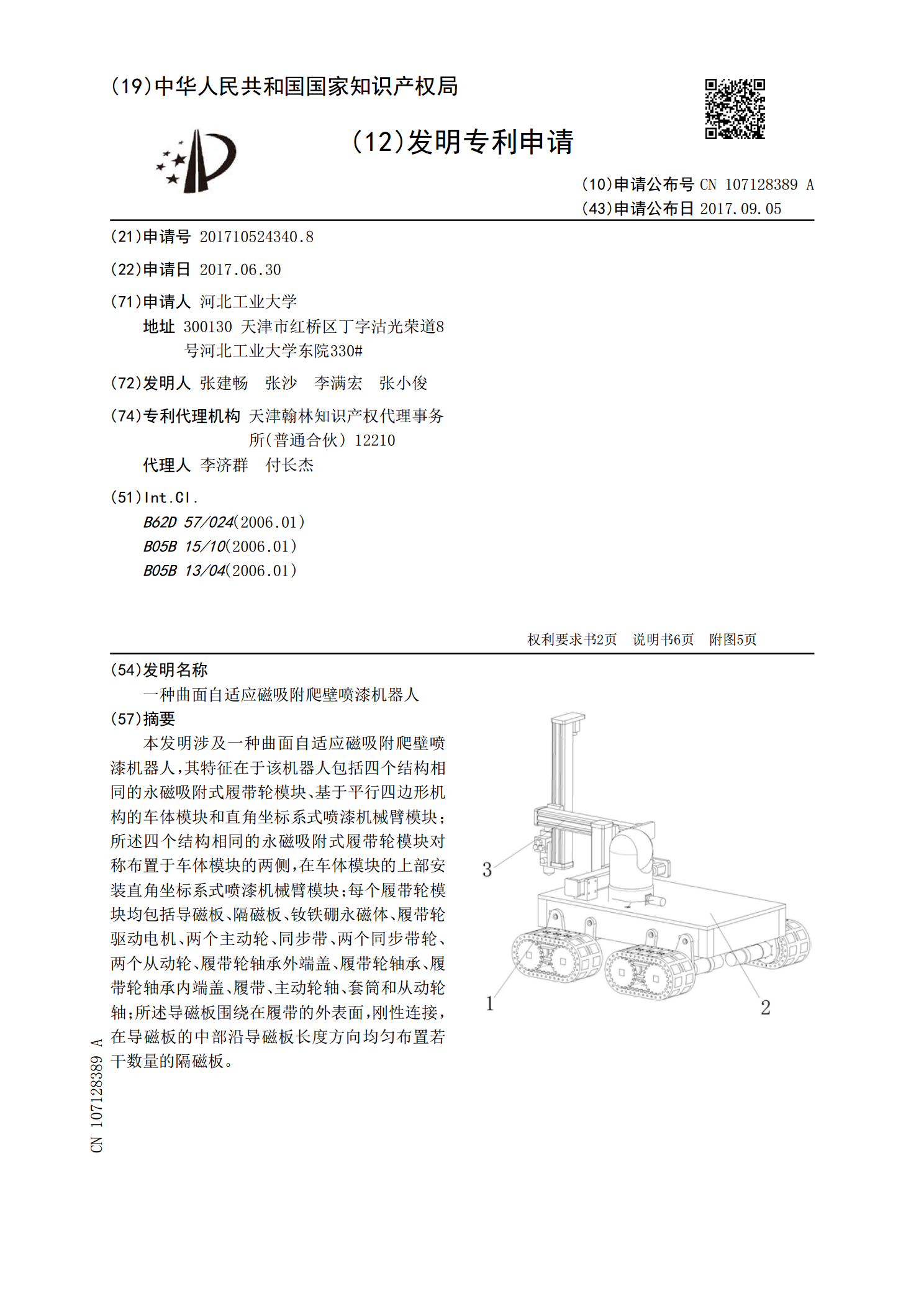
本发明涉及一种曲面自适应磁吸附爬壁喷漆机器人,其特征在于该机器人包括四个结构相同的永磁吸附式履带轮模块、基于平行四边形机构的车体模块和直角坐标系式喷漆机械臂模块;所述四个结构相同的永磁吸附式履带轮模块对称布置于车体模块的两侧,在车体模块的上部安装直角坐标系式喷漆机械臂模块;每个履带轮模块均包括导磁板、隔磁板、钕铁硼永磁体、履带轮驱动电机、两个主动轮、同步带、两个同步带轮、两个从动轮、履带轮轴承外端盖、履带轮轴承、履带轮轴承内端盖、履带、主动轮轴、套筒和从动轮轴;所述导磁板围绕在履带的外表面,刚性连接,在导