
拉扭复合微动疲劳试验设备及试验方法.pdf

甲申****66


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
拉扭复合微动疲劳试验设备及试验方法.pdf
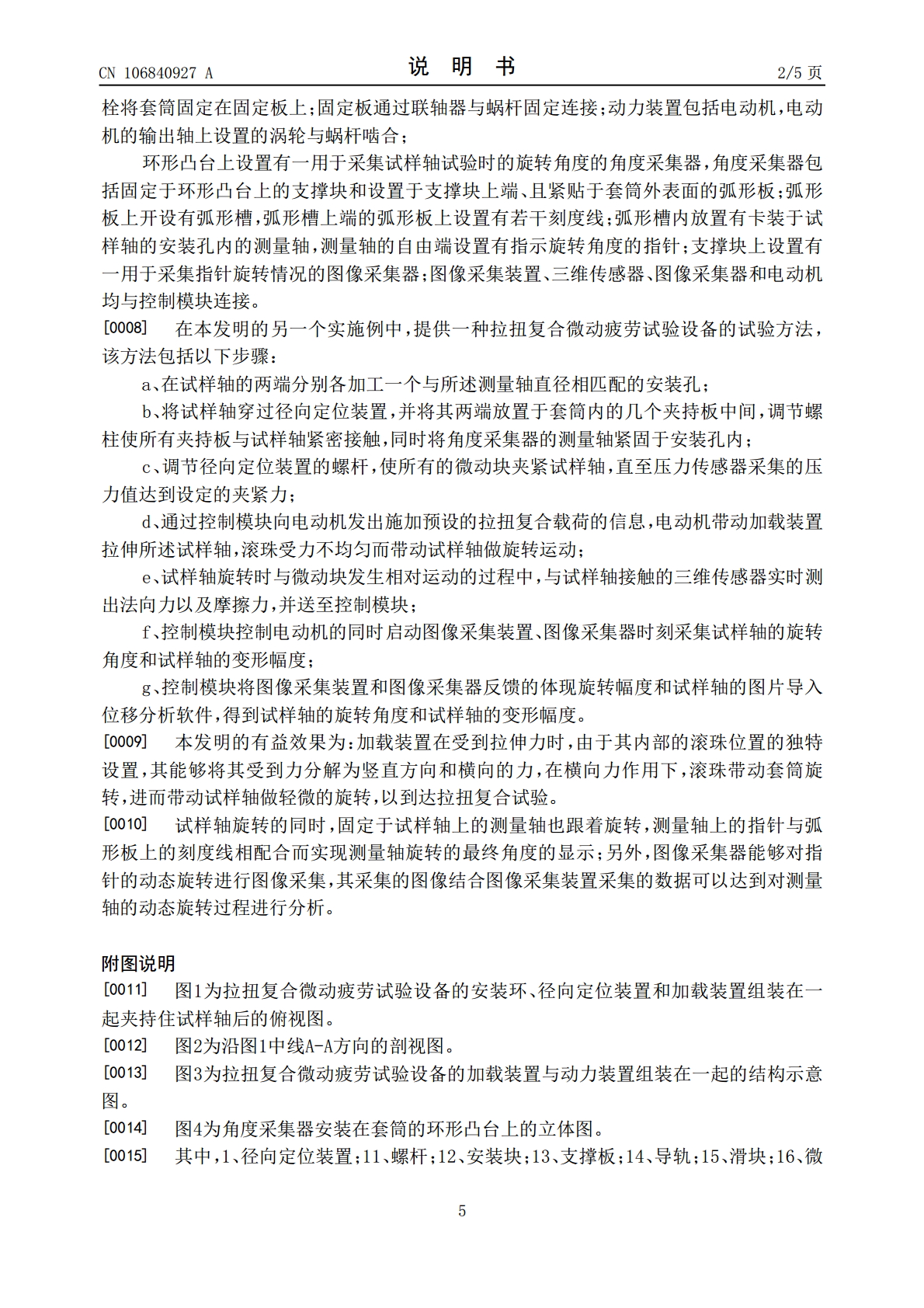
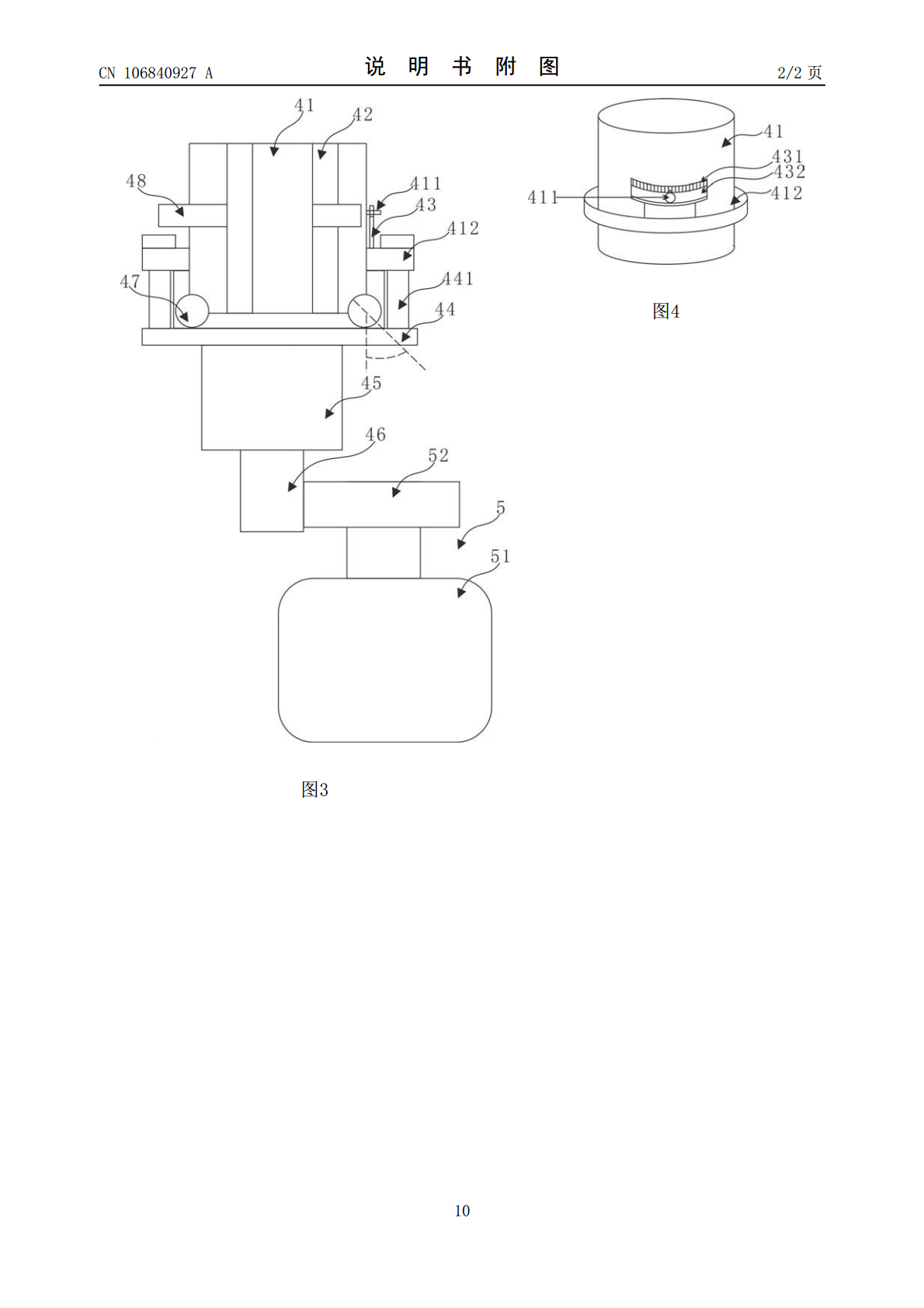
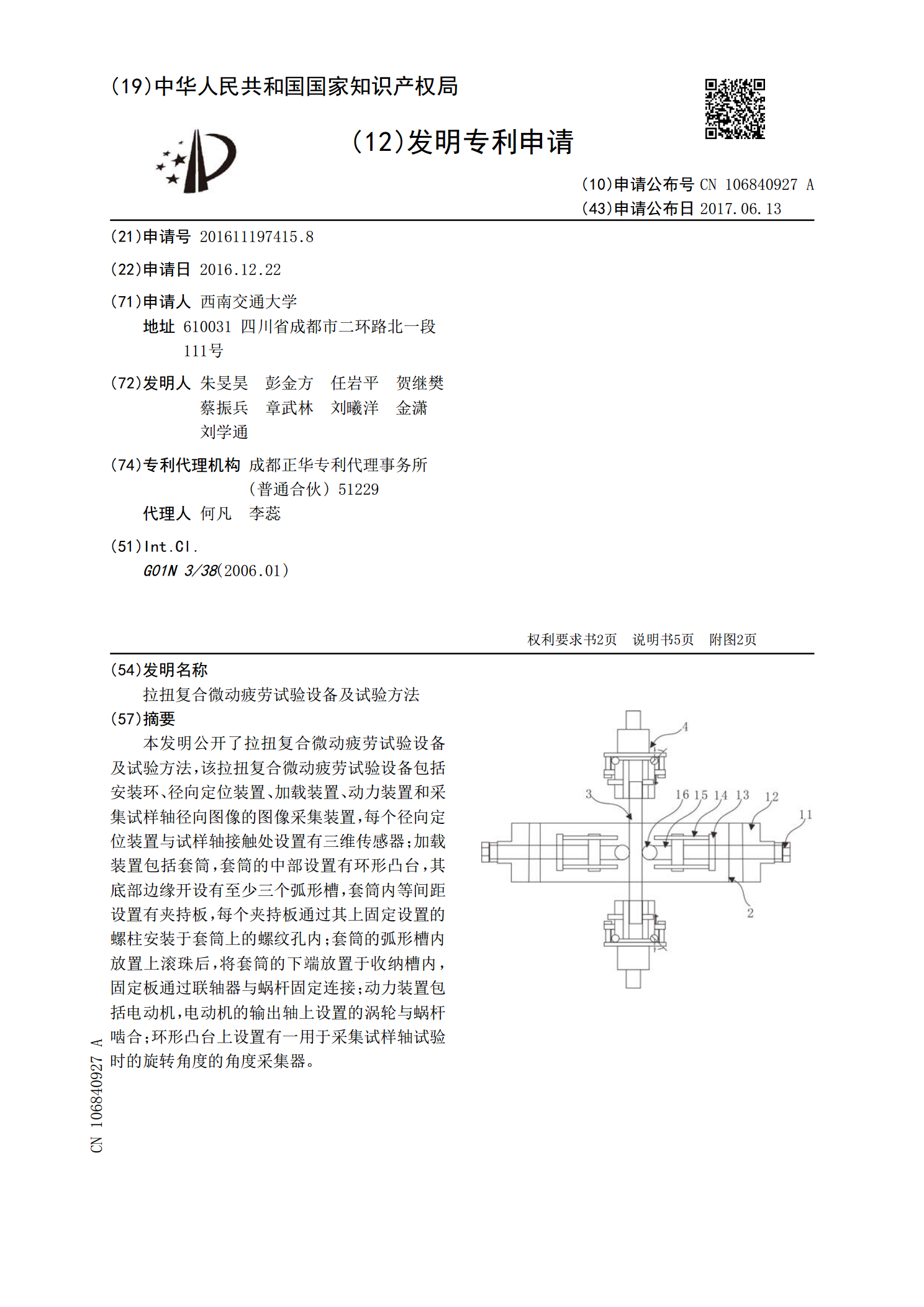
本发明公开了拉扭复合微动疲劳试验设备及试验方法,该拉扭复合微动疲劳试验设备包括安装环、径向定位装置、加载装置、动力装置和采集试样轴径向图像的图像采集装置,每个径向定位装置与试样轴接触处设置有三维传感器;加载装置包括套筒,套筒的中部设置有环形凸台,其底部边缘开设有至少三个弧形槽,套筒内等间距设置有夹持板,每个夹持板通过其上固定设置的螺柱安装于套筒上的螺纹孔内;套筒的弧形槽内放置上滚珠后,将套筒的下端放置于收纳槽内,固定板通过联轴器与蜗杆固定连接;动力装置包括电动机,电动机的输出轴上设置的涡轮与蜗杆啮合;环形

一种弯扭/弯拉微动疲劳与微动磨损试验系统及试验方法.pdf
本发明公开了一种弯扭/弯拉微动疲劳与微动磨损试验系统及其试验方法,涉及材料强度其摩擦学性能领域。系统包括试件夹持装置,载荷加载装置与计算机控制装置,并提供了一种新的材料强度和摩擦学性能检测方法,通过对称设置的凸轮机构,可以实现弯曲载荷的循环加载,与外部疲劳试验机相连进行弯拉/弯扭微动疲劳试验;也可以将一侧凸轮置换成圆盘,提供恒定法向载荷,另外一侧微动垫与试件形成面接触副,通过凸轮压杆提供微振,从而进行径向/切向微动磨损试验。控制装置可以记录传感器所监测数据并将其传至计算机,并通过驱动电路对电机进行控制,有

一种弯扭复合高温微动疲劳试验装置.pdf
本发明公开了一种弯扭复合高温微动疲劳试验装置,包括高温炉、扭转加载组件和弯曲加载组件;高温炉放置于支撑架的支撑平台上,支撑架固定于试验机上;扭转加载组件沿竖直方向贯穿高温炉,并将夹持的榫槽试样和榫头试样固定于高温炉内,以对榫槽试样和榫头试样施加扭转或拉伸载荷;弯曲加载组件位于支撑架的支撑平台上,并沿水平方向穿入高温炉内,以对榫槽试样和榫头试样施加弯曲载荷。本发明即可实现对微动疲劳试样的拉压、弯曲、扭转三种不同方向以及高温、室温不同温度条件的全方位试验,可以更好地揭示材料在微动疲劳过程中的损伤机理。
拉扭疲劳试验装置.pdf
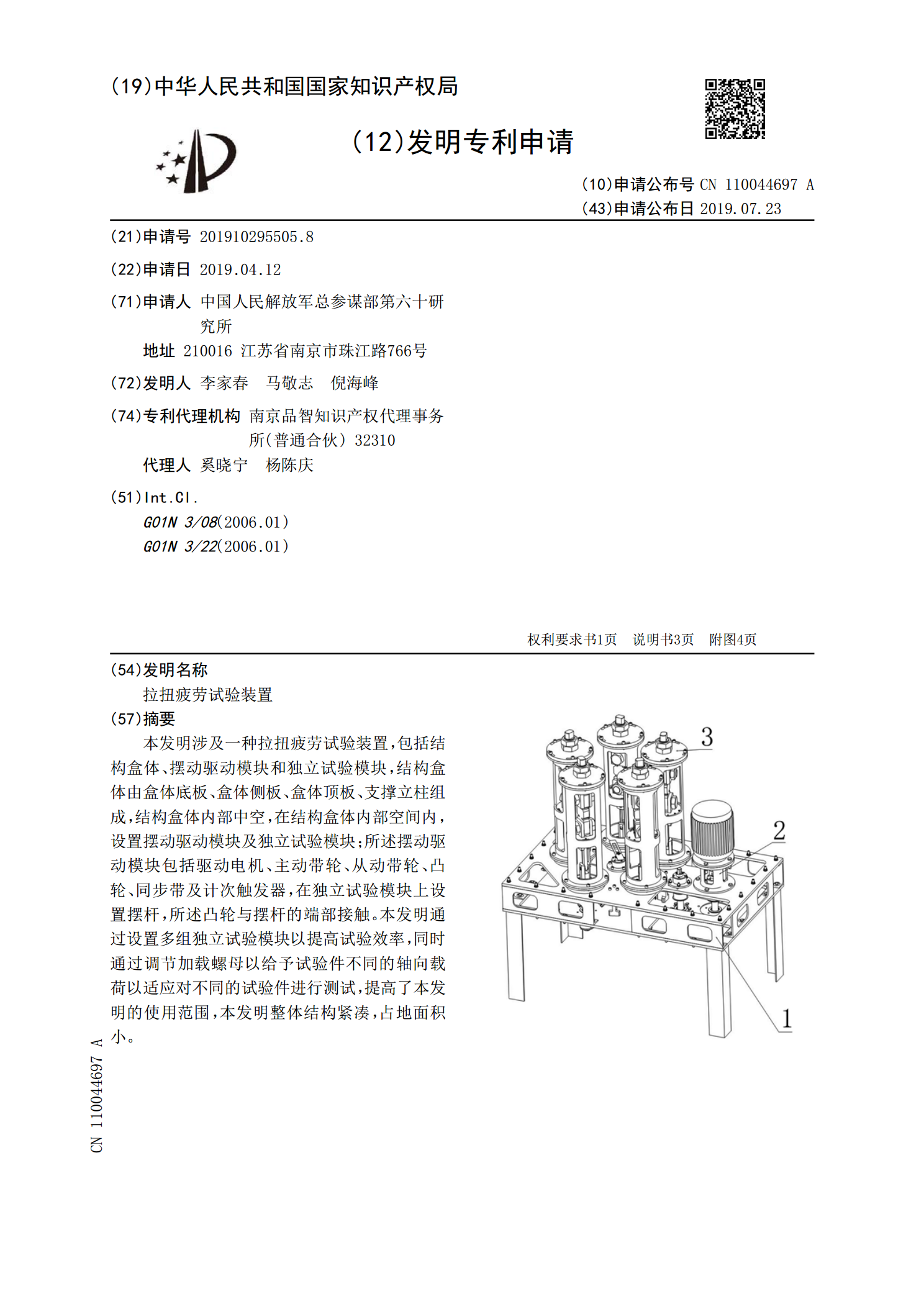
本发明涉及一种拉扭疲劳试验装置,包括结构盒体、摆动驱动模块和独立试验模块,结构盒体由盒体底板、盒体侧板、盒体顶板、支撑立柱组成,结构盒体内部中空,在结构盒体内部空间内,设置摆动驱动模块及独立试验模块;所述摆动驱动模块包括驱动电机、主动带轮、从动带轮、凸轮、同步带及计次触发器,在独立试验模块上设置摆杆,所述凸轮与摆杆的端部接触。本发明通过设置多组独立试验模块以提高试验效率,同时通过调节加载螺母以给予试验件不同的轴向载荷以适应对不同的试验件进行测试,提高了本发明的使用范围,本发明整体结构紧凑,占地面积小。
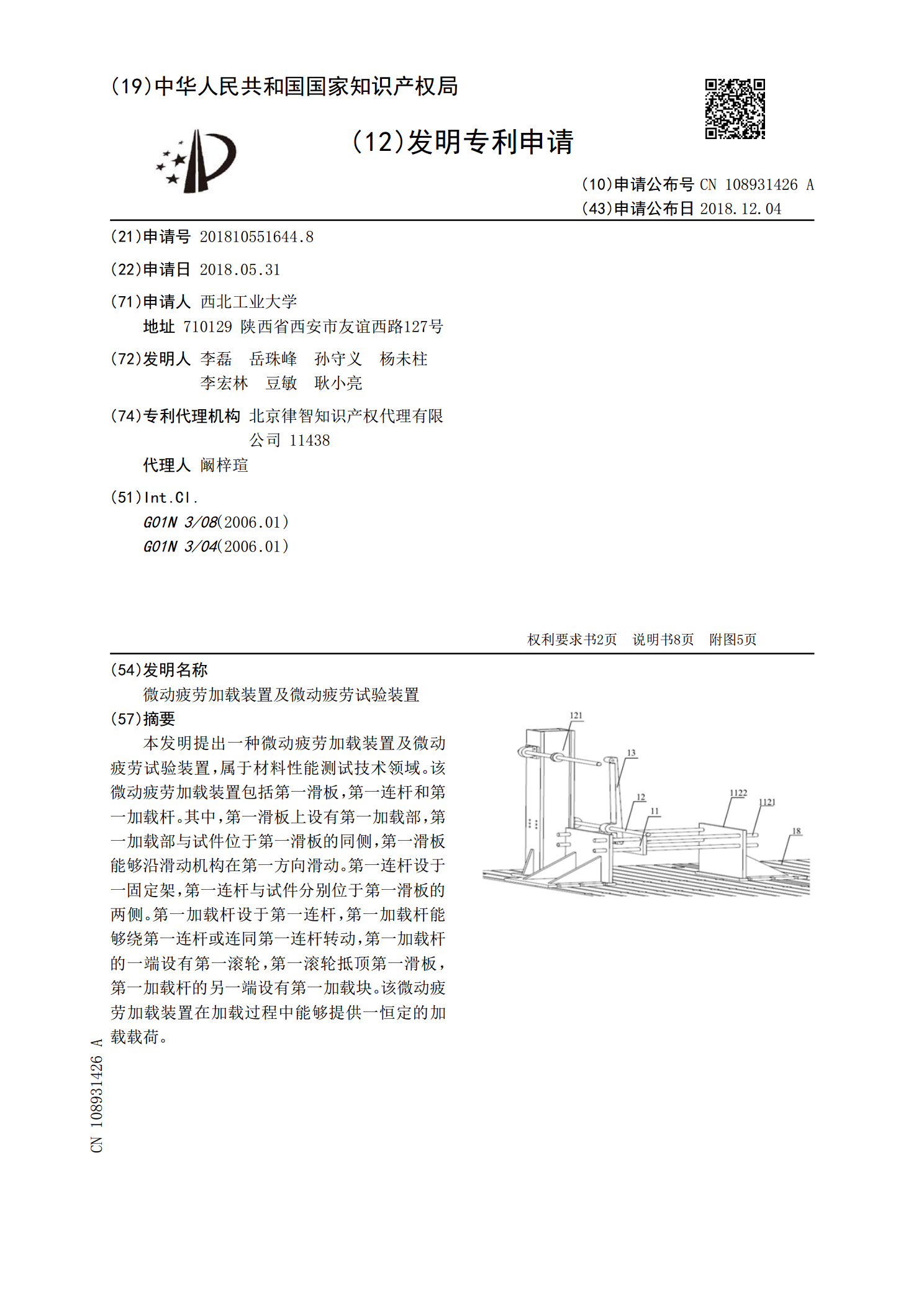
微动疲劳加载装置及微动疲劳试验装置.pdf
本发明提出一种微动疲劳加载装置及微动疲劳试验装置,属于材料性能测试技术领域。该微动疲劳加载装置包括第一滑板,第一连杆和第一加载杆。其中,第一滑板上设有第一加载部,第一加载部与试件位于第一滑板的同侧,第一滑板能够沿滑动机构在第一方向滑动。第一连杆设于一固定架,第一连杆与试件分别位于第一滑板的两侧。第一加载杆设于第一连杆,第一加载杆能够绕第一连杆或连同第一连杆转动,第一加载杆的一端设有第一滚轮,第一滚轮抵顶第一滑板,第一加载杆的另一端设有第一加载块。该微动疲劳加载装置在加载过程中能够提供一恒定的加载载荷。