
一种蛇形机器人.pdf

一吃****昕靓

1/9

2/9

3/9

4/9

5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种蛇形机器人.pdf
本发明公开了一种蛇形机器人,包括蛇体、舵机控制板和电源锂电池,蛇体包括若干组依次串接的蛇体关节,每个蛇体关节的前后连接板设计了防滑齿,蛇形机器人的CPU通过无线接收模块接收来自计算机端的控制指令,CPU将控制指令处理后通过I/O口驱动多路舵机,为蛇形机器人运动提供驱动动力。本发明所提供的蛇形机器人模仿蛇的行波运动,进行仿生设计,采用模块化设计,机构更加简单,安装更加简单,通过在蛇体关节上增加防滑齿机构,增加了与地面的摩擦力,提高了运动效率。
一种蛇形机器人.pdf
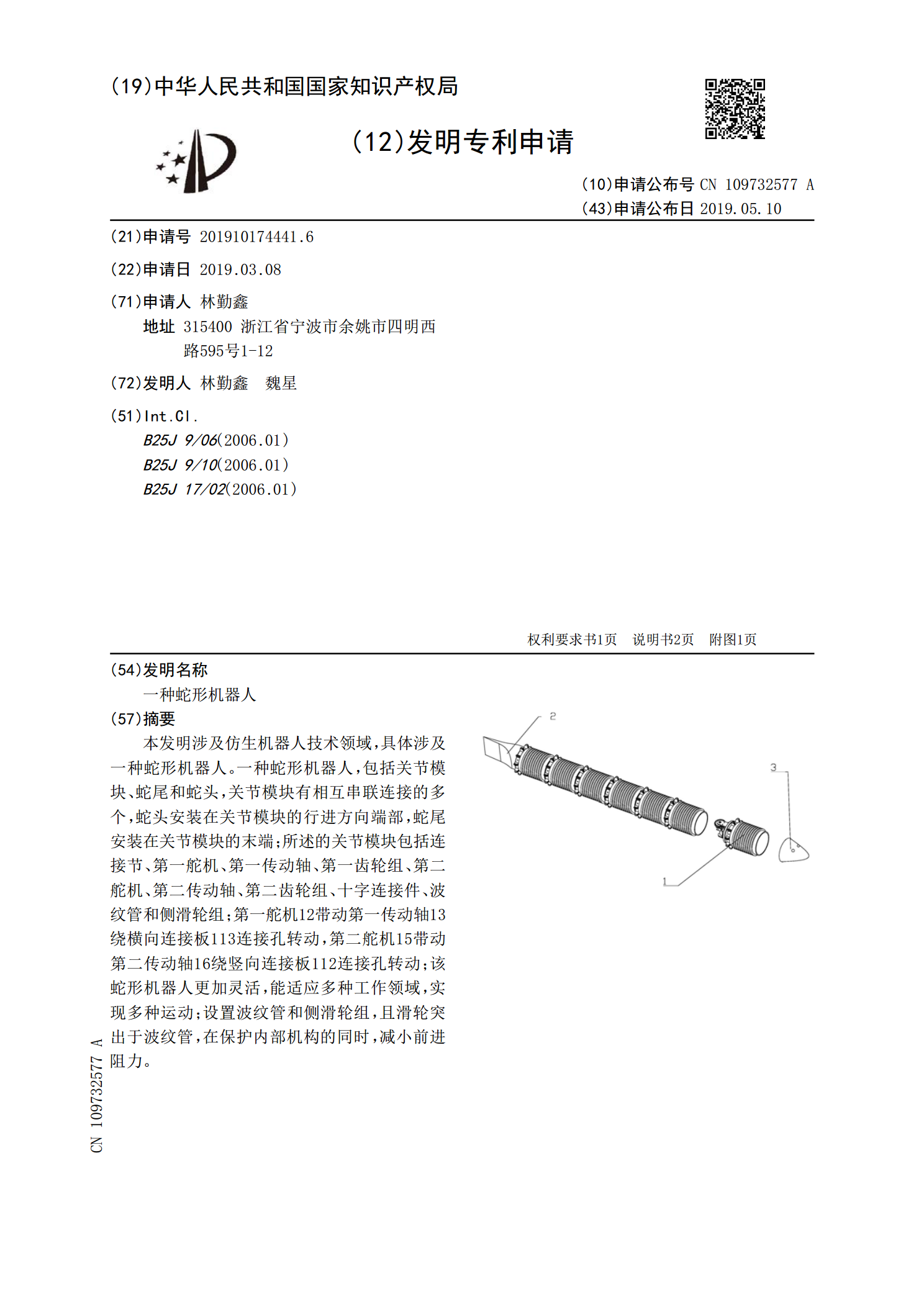
本发明涉及仿生机器人技术领域,具体涉及一种蛇形机器人。一种蛇形机器人,包括关节模块、蛇尾和蛇头,关节模块有相互串联连接的多个,蛇头安装在关节模块的行进方向端部,蛇尾安装在关节模块的末端;所述的关节模块包括连接节、第一舵机、第一传动轴、第一齿轮组、第二舵机、第二传动轴、第二齿轮组、十字连接件、波纹管和侧滑轮组;第一舵机12带动第一传动轴13绕横向连接板113连接孔转动,第二舵机15带动第二传动轴16绕竖向连接板112连接孔转动;该蛇形机器人更加灵活,能适应多种工作领域,实现多种运动;设置波纹管和侧滑轮组,且
一种蛇形机器人.pdf
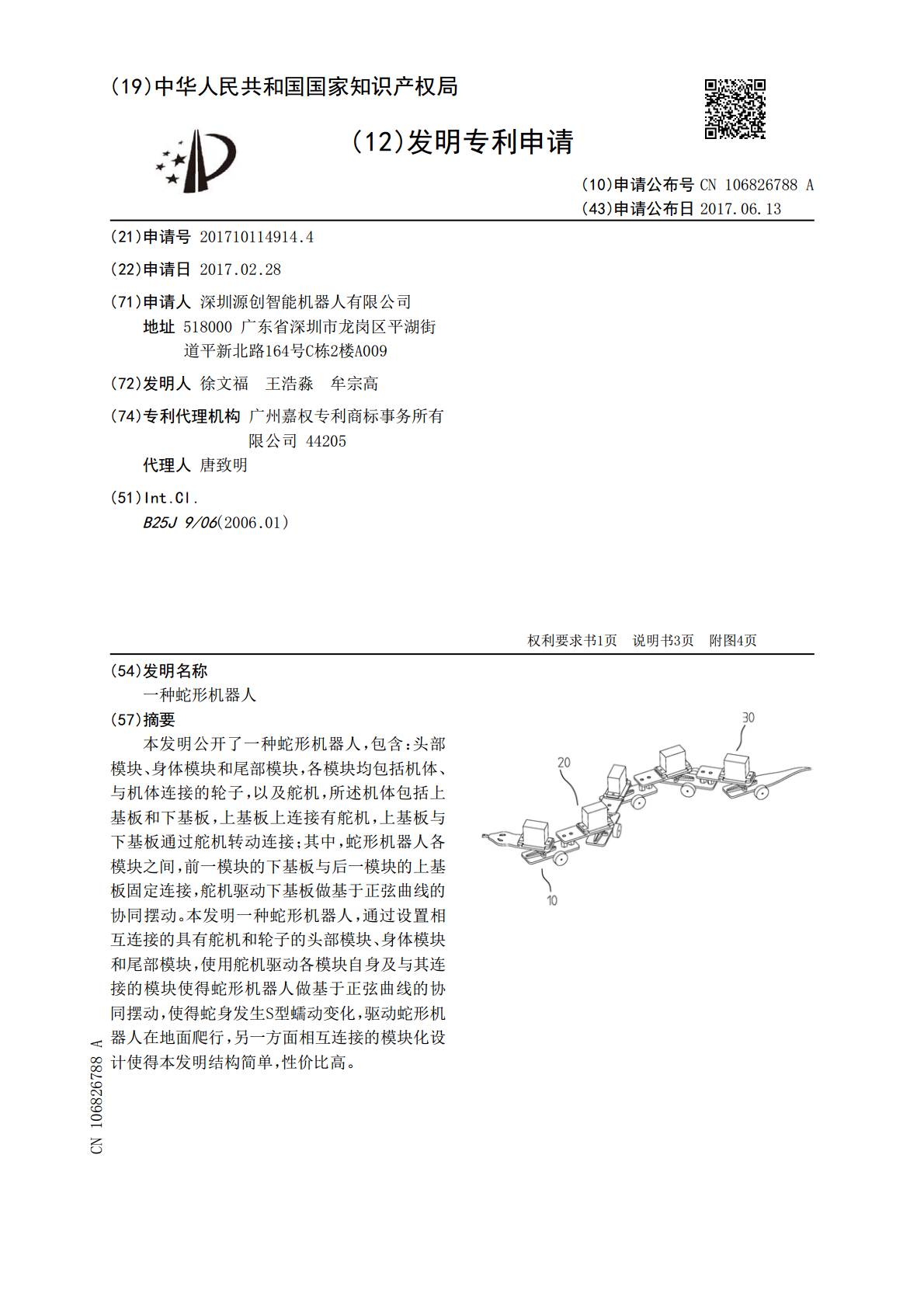
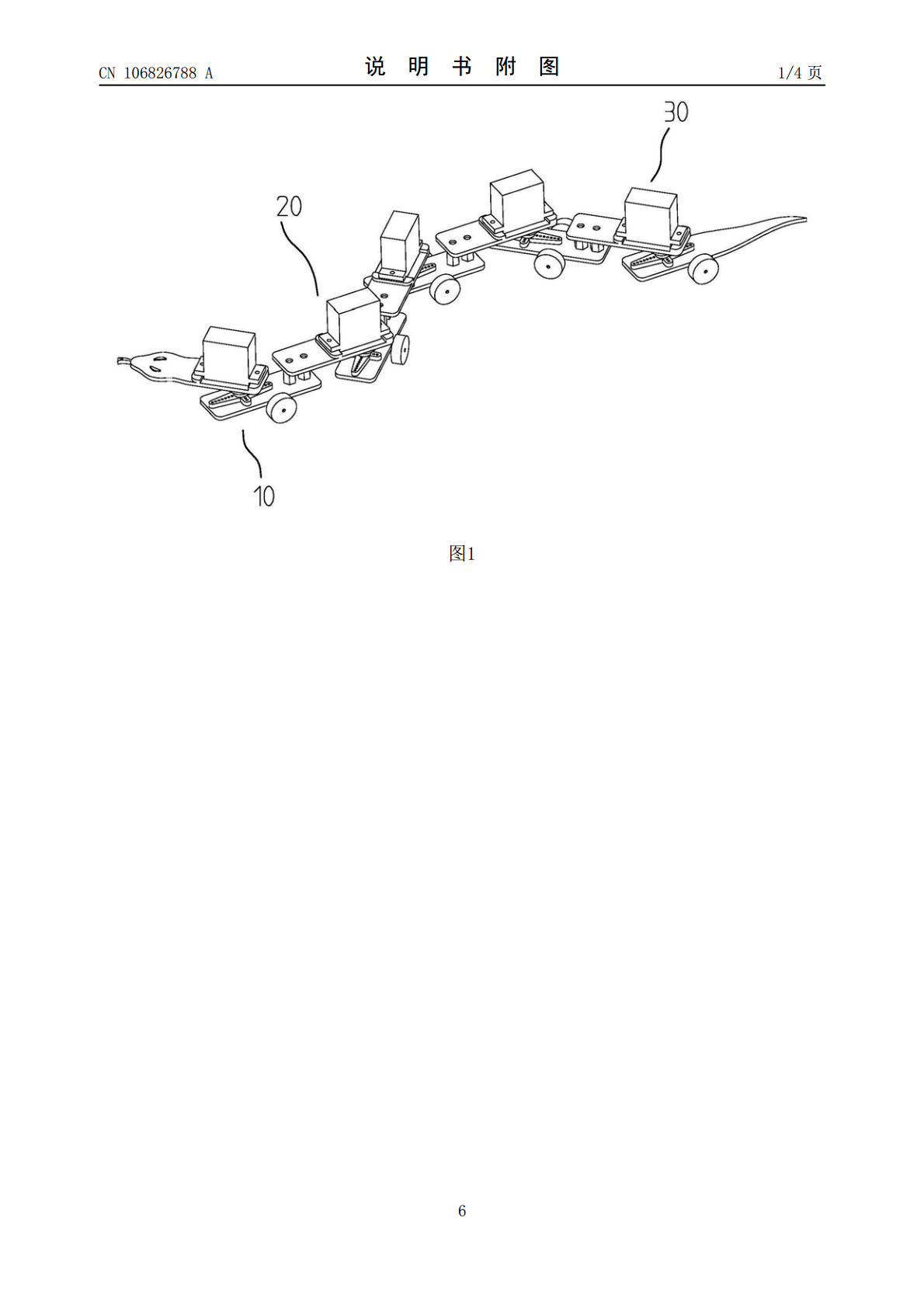
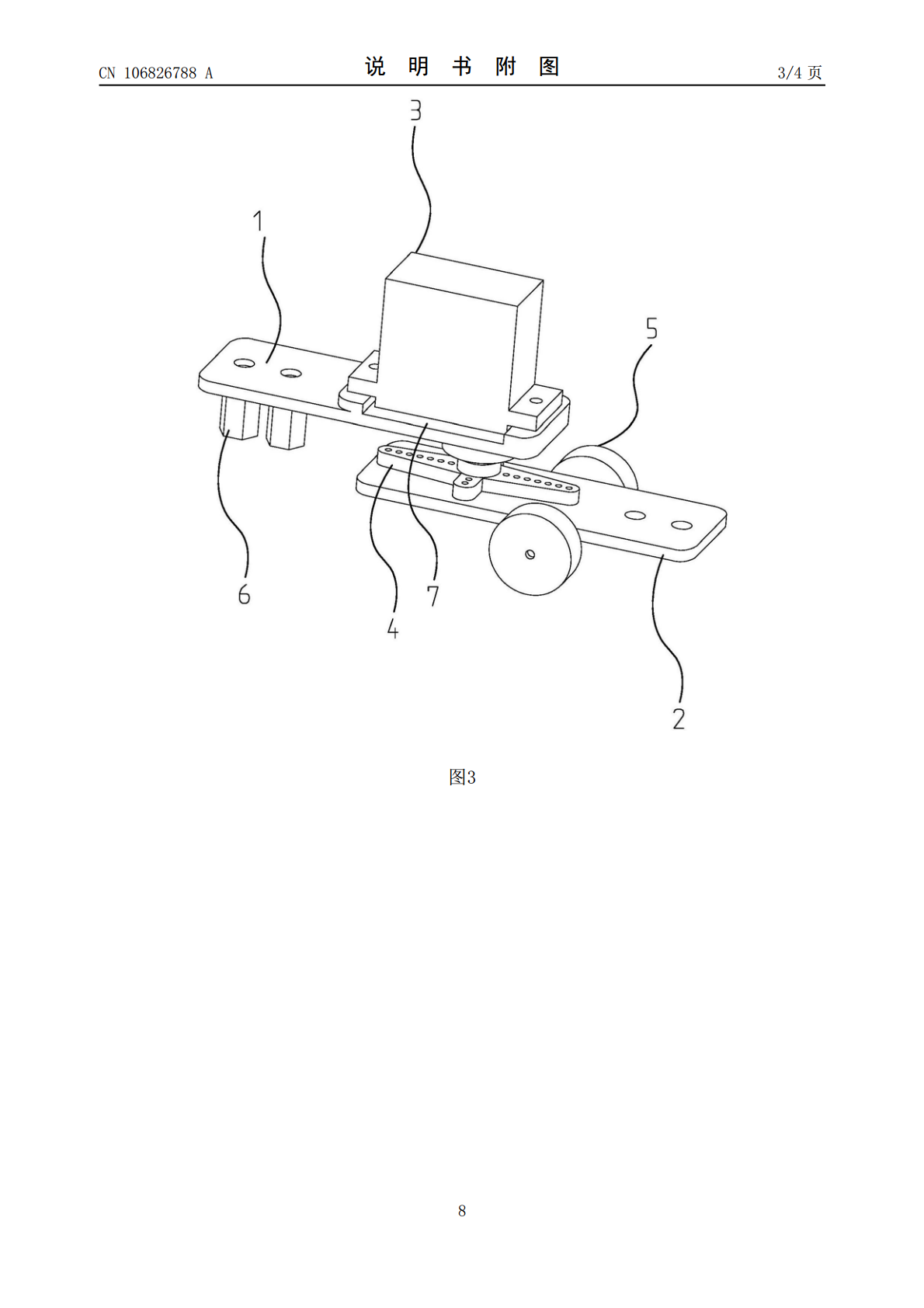
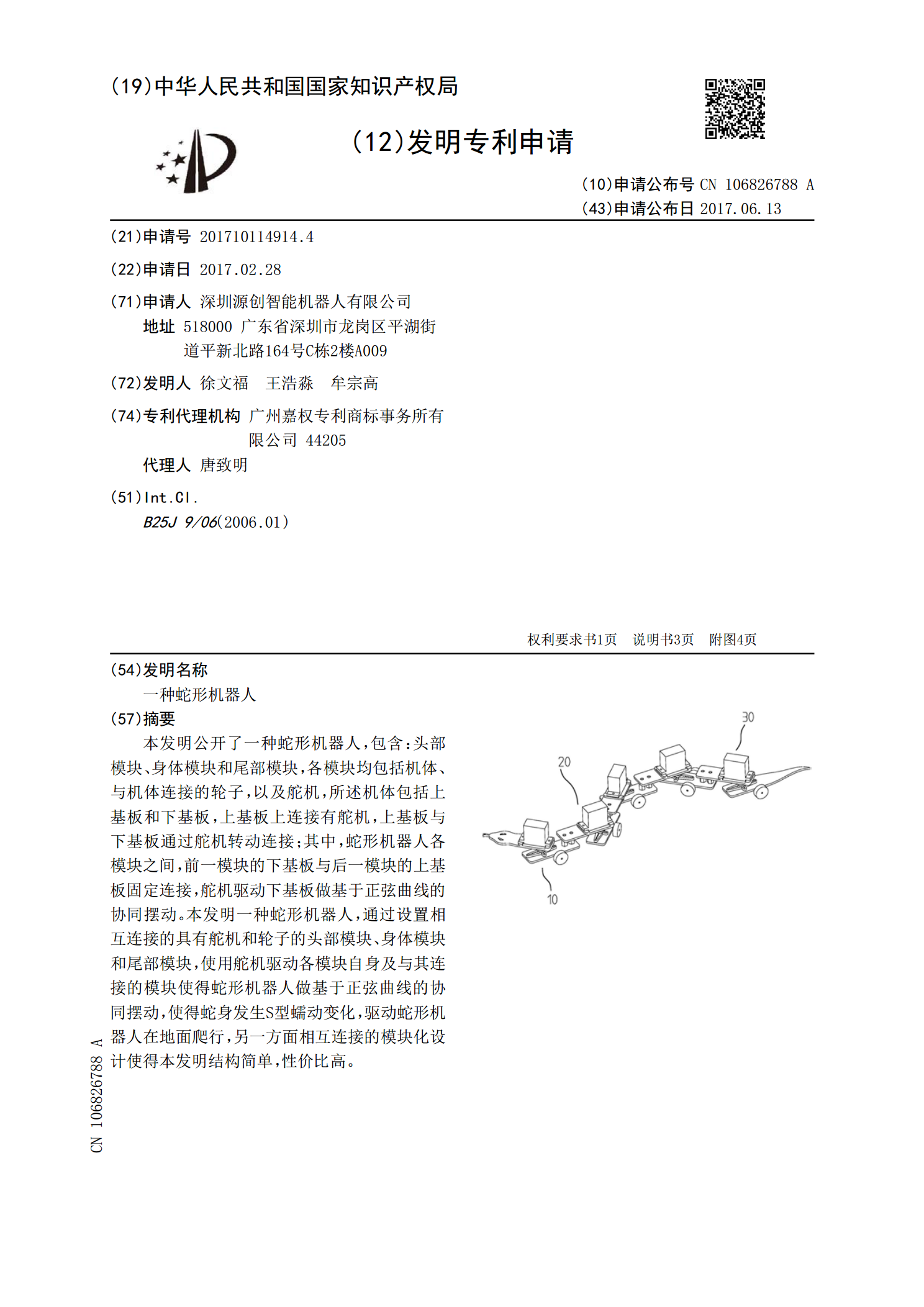
本发明公开了一种蛇形机器人,包含:头部模块、身体模块和尾部模块,各模块均包括机体、与机体连接的轮子,以及舵机,所述机体包括上基板和下基板,上基板上连接有舵机,上基板与下基板通过舵机转动连接;其中,蛇形机器人各模块之间,前一模块的下基板与后一模块的上基板固定连接,舵机驱动下基板做基于正弦曲线的协同摆动。本发明一种蛇形机器人,通过设置相互连接的具有舵机和轮子的头部模块、身体模块和尾部模块,使用舵机驱动各模块自身及与其连接的模块使得蛇形机器人做基于正弦曲线的协同摆动,使得蛇身发生S型蠕动变化,驱动蛇形机器人在地

一种蛇形机器人.pdf
本发明涉及一种蛇形机器人,包括若干首尾连接的蛇形机器单元,所述蛇形机器单元包括一个鳞片套筒和一个主套筒;设置在主套筒内依次排列的偏转舵机组件、往复平移舵机组件、以及连接有舵盘连接器的回转舵机组件;所述主套筒上固定有若干滚轮组件,所述鳞片套筒内壁与滚轮组件接触,并套在所述主套筒外;所述主套筒上设有一个滑动槽,所述滑动槽内设有一与往复平移舵机组件配接并能在往复平移舵机组件的驱动下在滑动槽内做往复运动的拨叉;所述鳞片套筒与拨叉固定。因此,本发明具有如下优点:对高压输电线路的缠绕姿态要求低,可以实现对高压输电线路

一种蛇形机器人.pdf
本发明公开了一种蛇形机器人,包括头部、身部、线路板、电源。头部包括摄像头、钻头,身部包括多个首尾相连的驱动模块,每个驱动模块包括一个关节和一个推进体。推进体包括麦克纳姆轮、支架、电机,电机固定在支架上,麦克纳姆轮转动固定在支架上,电机带动麦克纳姆轮旋转,若干个麦克纳姆轮驱动蛇形机器人运动,通过控制电机,可以控制蛇形机器人的运动速度。关节包括至少3个电机,通过控制各个关节内的电机来控制蛇形机器人的形态以及运动的方向。本发明公开的蛇形机器人具有行进速度快、动作敏捷、可以在多种复杂环境下工作等优点。