
一种液力透平叶轮多工况多目标优化设计方法.pdf

一只****iu


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种液力透平叶轮多工况多目标优化设计方法.pdf
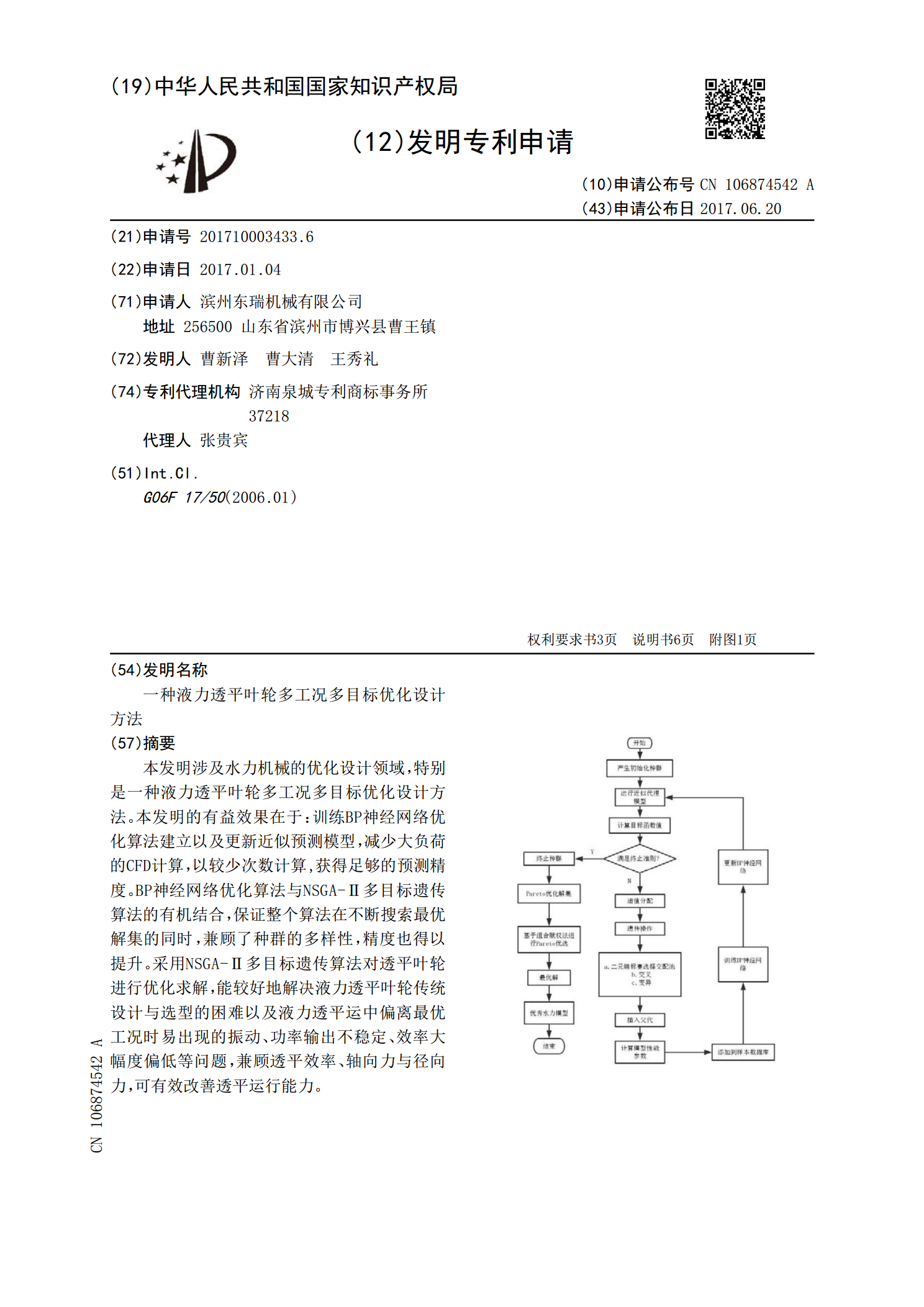
本发明涉及水力机械的优化设计领域,特别是一种液力透平叶轮多工况多目标优化设计方法。本发明的有益效果在于:训练BP神经网络优化算法建立以及更新近似预测模型,减少大负荷的CFD计算,以较少次数计算,获得足够的预测精度。BP神经网络优化算法与NSGA‑Ⅱ多目标遗传算法的有机结合,保证整个算法在不断搜索最优解集的同时,兼顾了种群的多样性,精度也得以提升。采用NSGA‑Ⅱ多目标遗传算法对透平叶轮进行优化求解,能较好地解决液力透平叶轮传统设计与选型的困难以及液力透平运中偏离最优工况时易出现的振动、功率输出不稳定、效率
一种液力透平叶轮优化设计方法.pdf
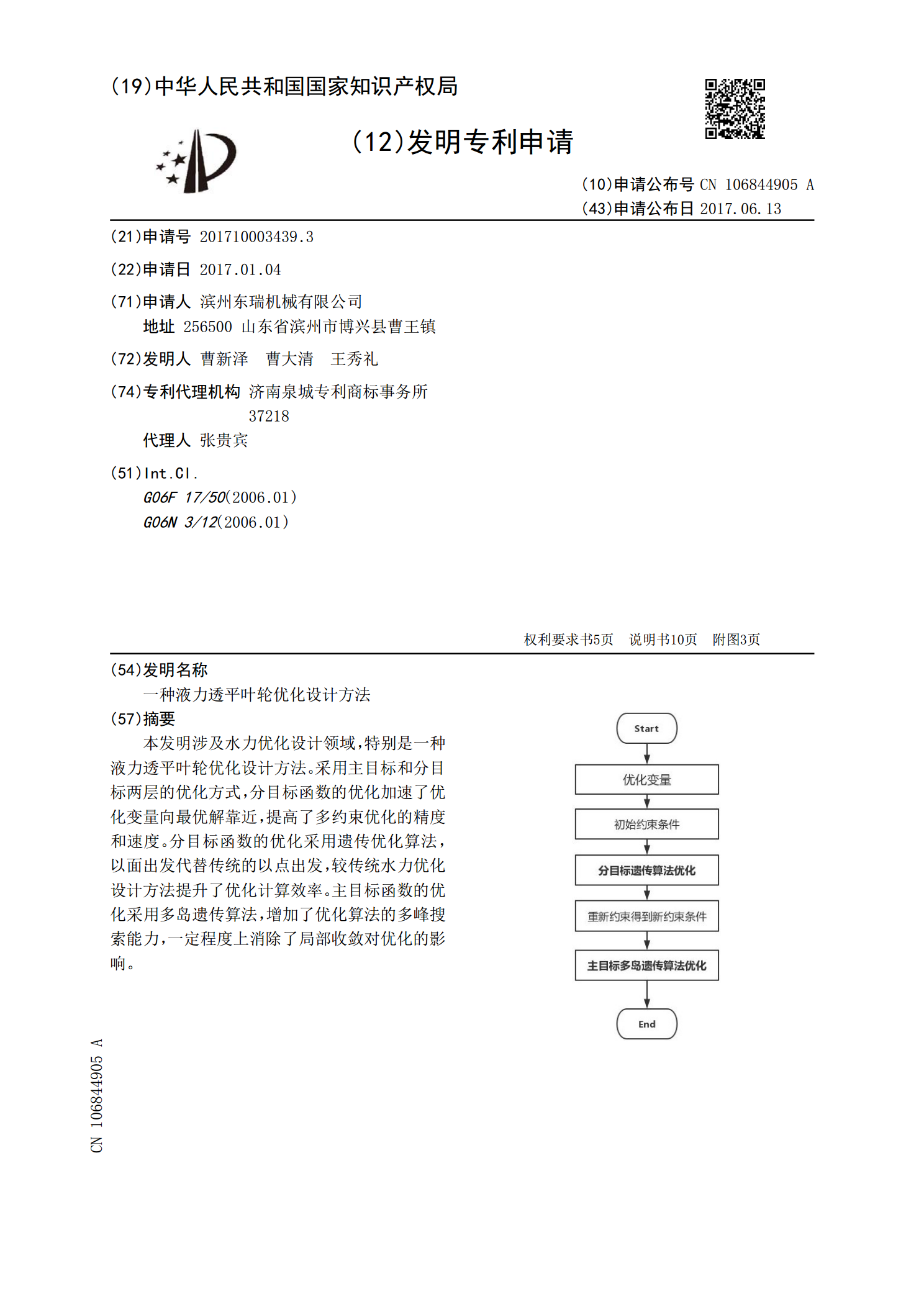
本发明涉及水力优化设计领域,特别是一种液力透平叶轮优化设计方法。采用主目标和分目标两层的优化方式,分目标函数的优化加速了优化变量向最优解靠近,提高了多约束优化的精度和速度。分目标函数的优化采用遗传优化算法,以面出发代替传统的以点出发,较传统水力优化设计方法提升了优化计算效率。主目标函数的优化采用多岛遗传算法,增加了优化算法的多峰搜索能力,一定程度上消除了局部收敛对优化的影响。

基于响应曲面法的液力透平叶轮多目标优化设计.docx
基于响应曲面法的液力透平叶轮多目标优化设计基于响应曲面法的液力透平叶轮多目标优化设计一、引言液力透平是一种利用液体流体能量转化为机械能的装置,其叶轮是其中最重要的组成部分。对于液力透平叶轮来说,关键是在保证其性能指标的基础上,优化其设计参数,以提高其效率和性能。而多目标优化设计能够在考虑多个目标函数的情况下,得到一组最优解,能够更好地满足不同的工程要求。本论文将从液力透平叶轮的设计原理和优化方法出发,基于响应曲面法进行多目标优化设计的详细介绍。二、液力透平叶轮的设计原理液力透平的工作原理是将液体经过叶轮转

一种离心式液力透平叶轮及其设计方法.pdf
本发明公开了一种离心式液力透平叶轮,包括透平前盖板、后盖板和叶片,叶片位于前盖板和后盖板之间,叶片呈弧形,叶片包括叶片根部区域、叶片弧形区域和叶片端部区域,叶片设置在前盖板和后盖板之间,且叶片根部区域在后盖板上呈顺时针放置,叶片端部区域在后盖板上呈逆时针放置;它还公开了液力透平专用叶轮的设计方法,计算出最佳的叶片进口安放角β

一种液力透平的叶轮.pdf
本发明公开了一种液力透平的叶轮,包括前盖板、后盖板和叶片,叶片固定连接在前盖板和后盖板之间,所述的叶片呈前弯形,叶片的包角在20°-130°之间;叶片的进口安放角其中,β2表示叶片的进口安放角,u2为叶轮进口处的圆周速度,为叶轮进口处的轴面速度,α2为叶轮的绝对液流角;叶片的出口安放角其中,β1表示叶片的出口安放角,为叶轮出口处的轴面速度,u1为叶轮出口处的圆周速度。该结构的液力透平的叶轮,可以有效提高液力透平的效率和运行稳定性。