
超声手术刀手柄模组.pdf

高格****gu

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

超声手术刀手柄模组.pdf
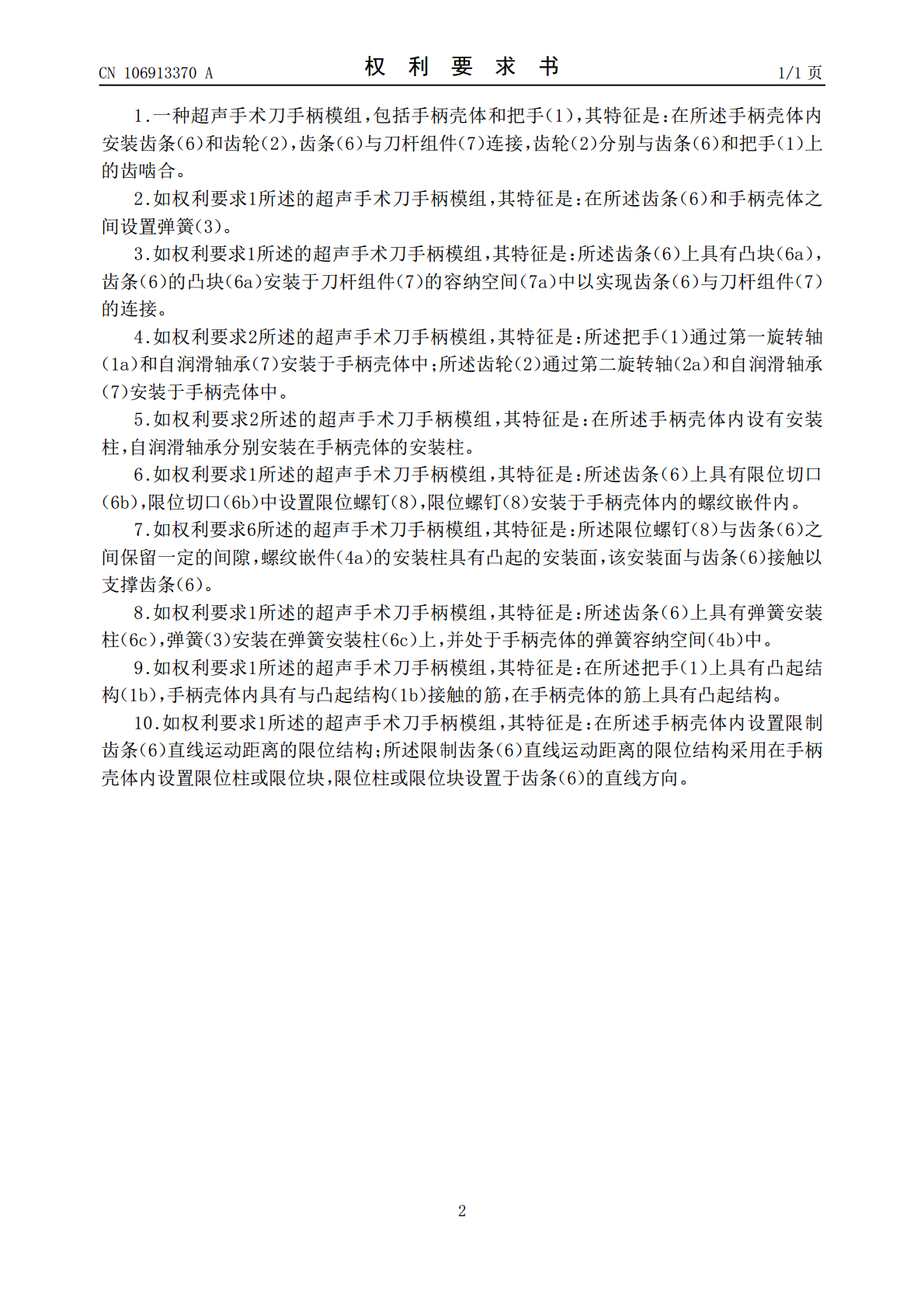
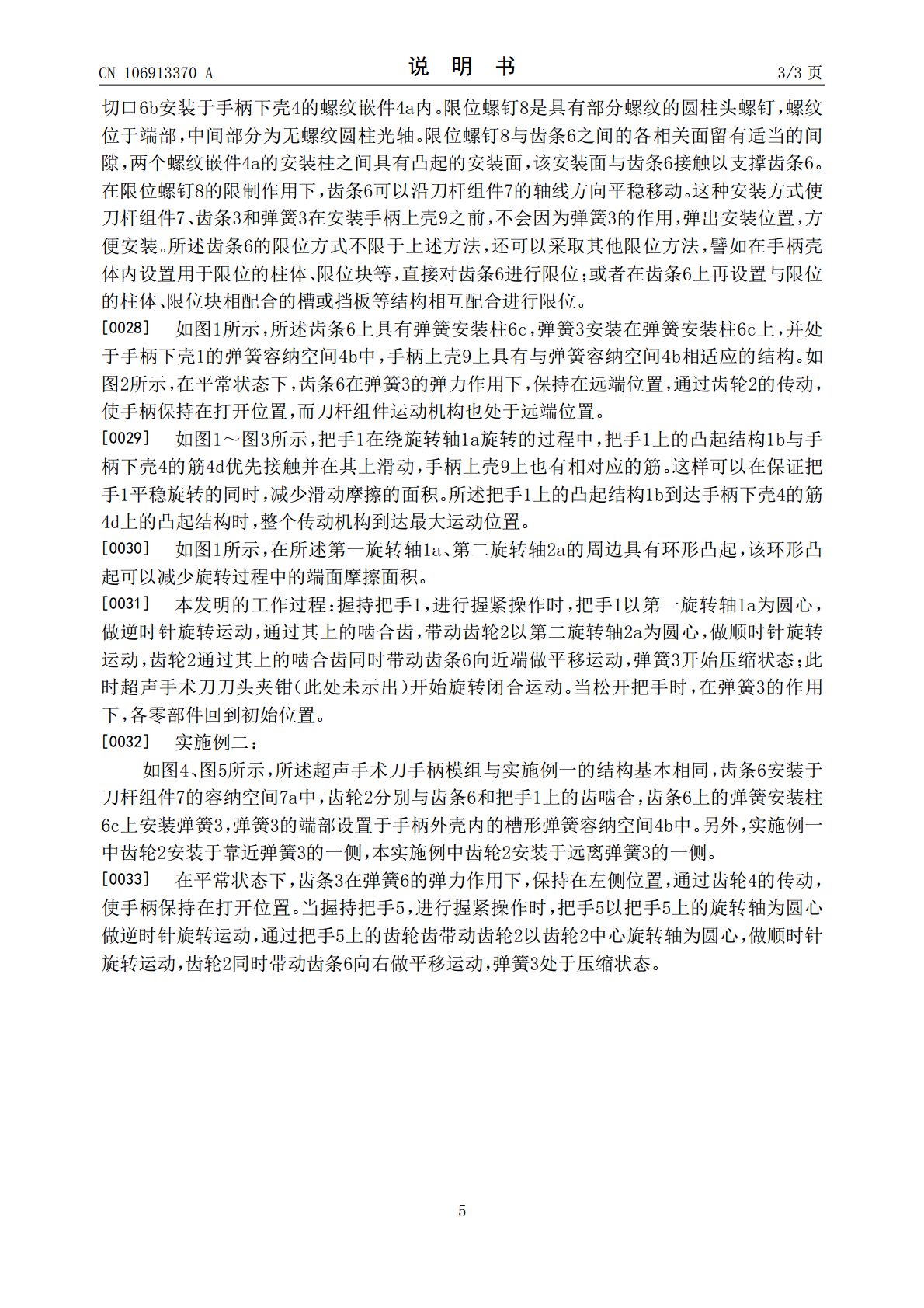
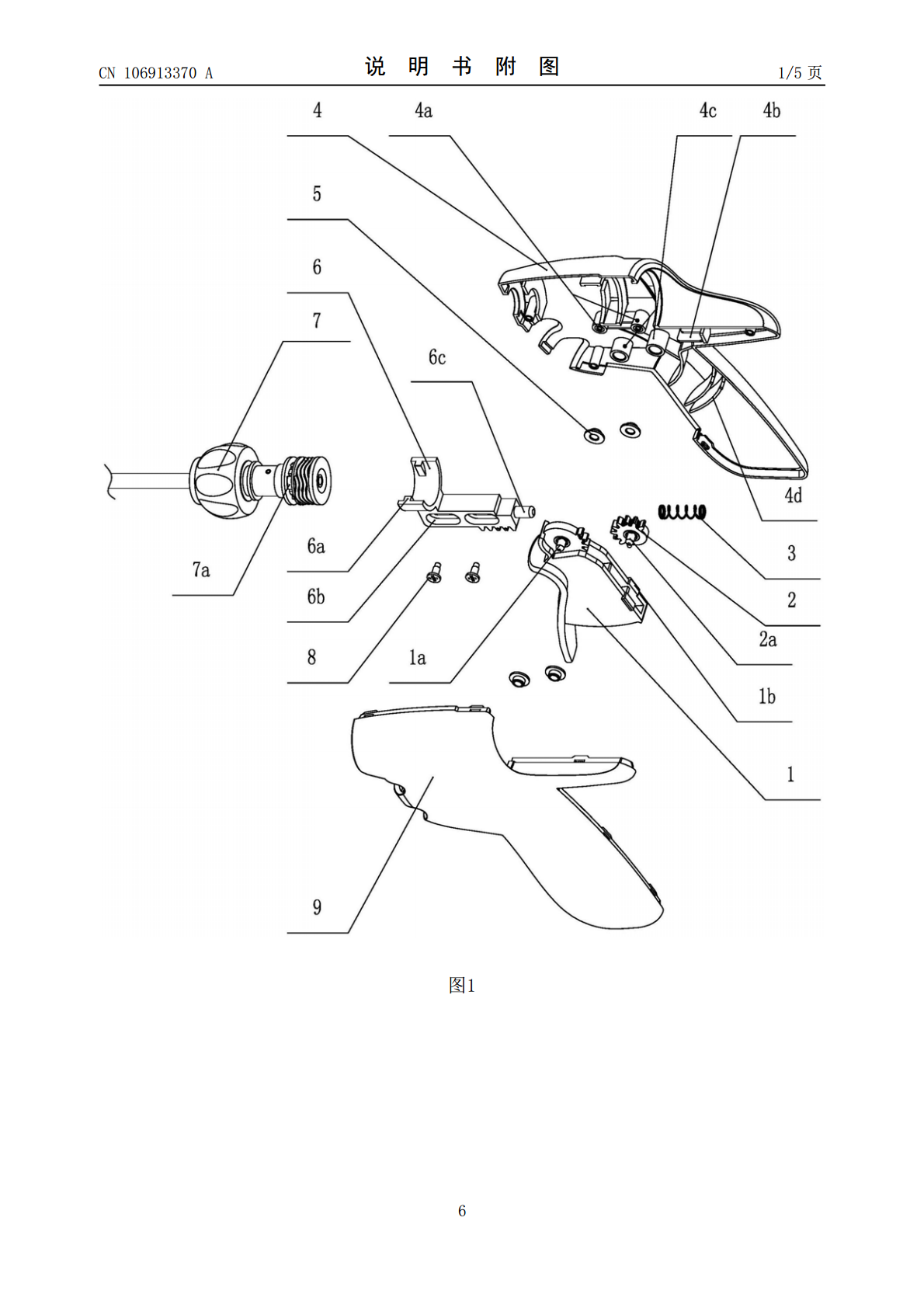
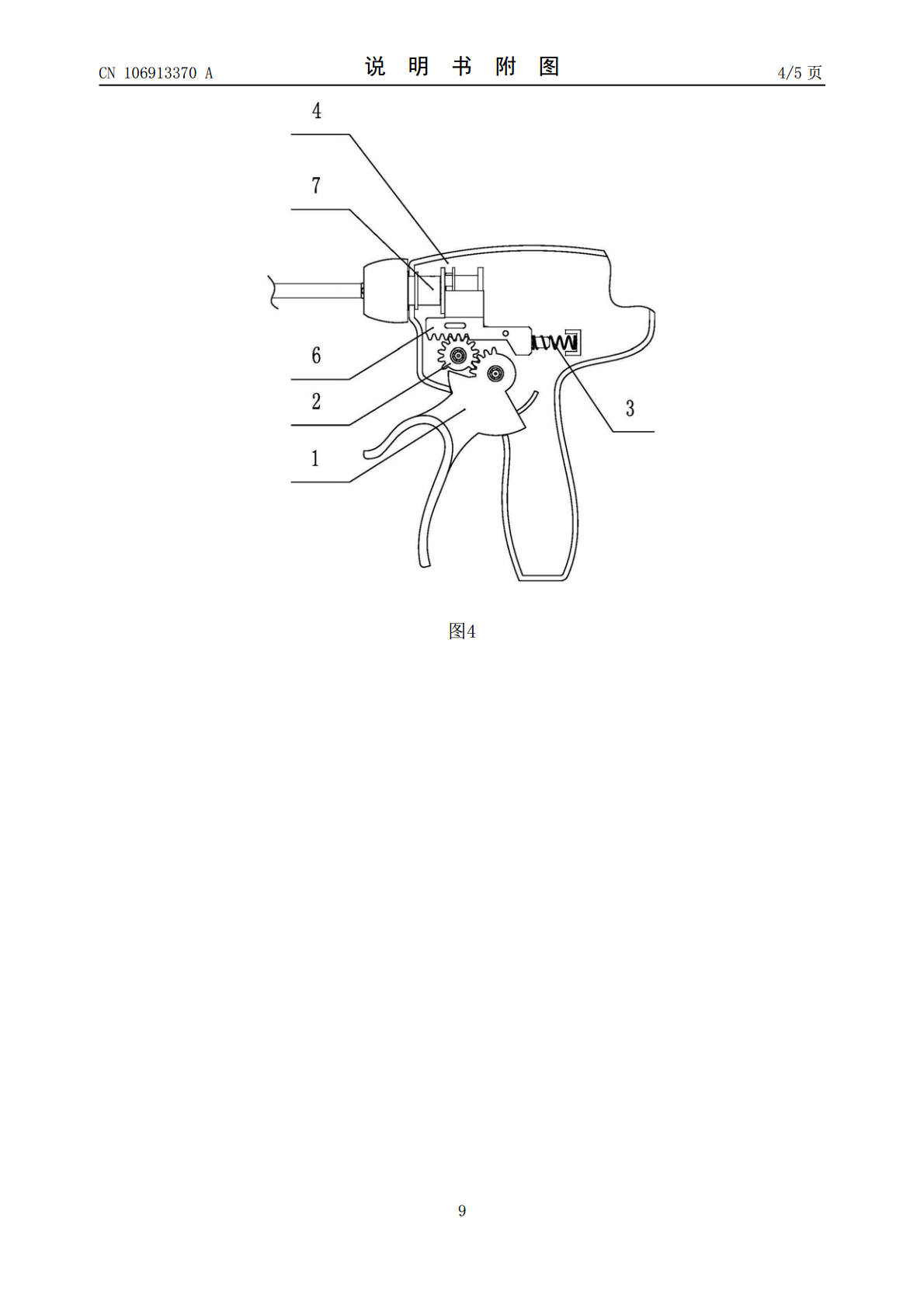
本发明涉及一种超声手术刀手柄模组,包括手柄壳体和把手,其特征是:在所述手柄壳体内安装齿条和齿轮,齿条与刀杆组件连接,齿轮分别与齿条和把手上的齿啮合,在齿条和手柄壳体之间设置弹簧;在所述手柄壳体内设置限制齿条直线运动距离的限位结构。所述齿条上具有凸块,齿条的凸块安装于刀杆组件的容纳空间中以实现齿条与刀杆组件的连接。所述把手通过第一旋转轴和自润滑轴承安装于手柄壳体中;所述齿轮通过第二旋转轴和自润滑轴承安装于手柄壳体中。所述齿条上具有限位切口,限位切口中设置限位螺钉,限位螺钉安装于手柄壳体内的螺纹嵌件内。本发明
超声探头手柄.pdf
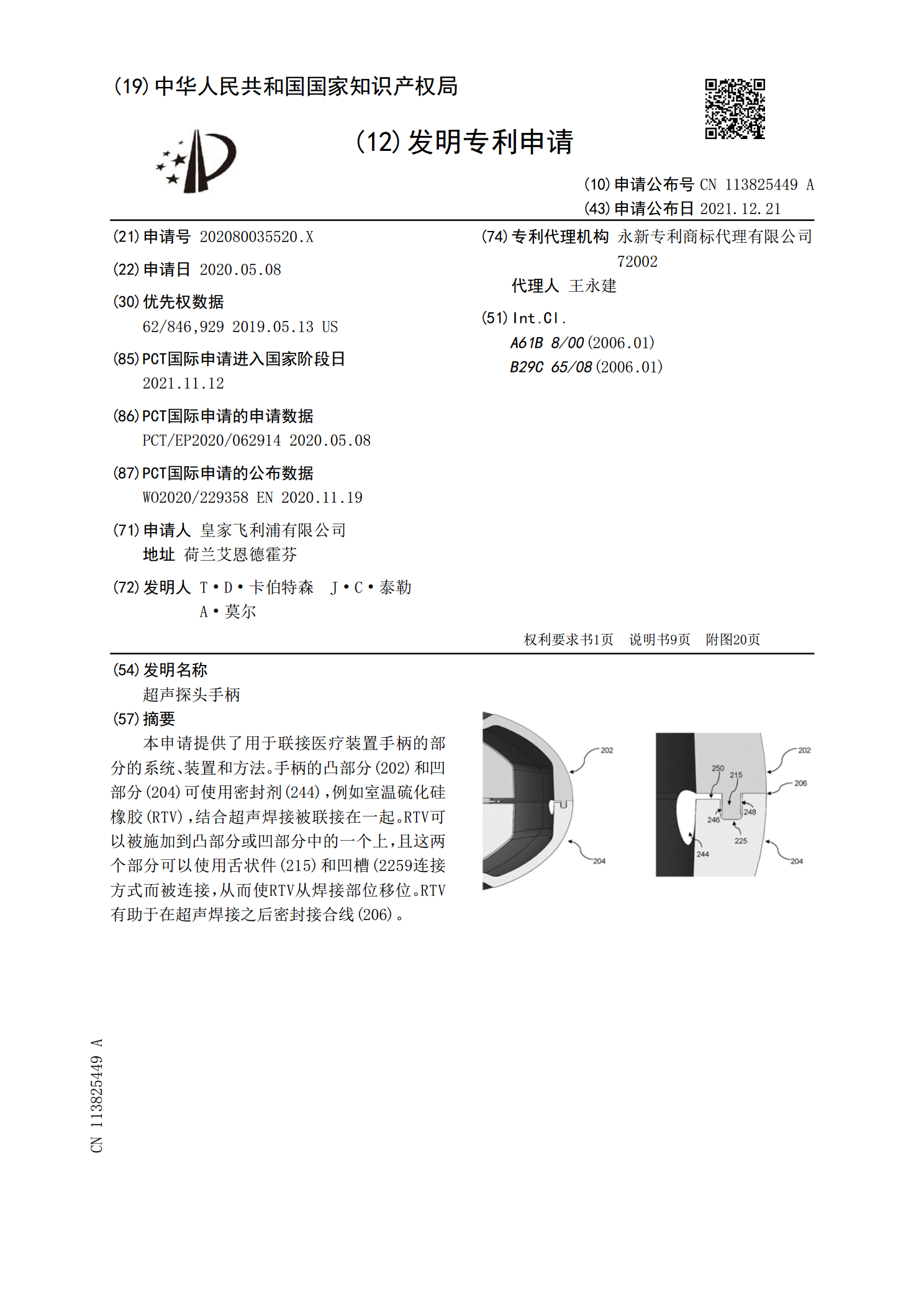
本申请提供了用于联接医疗装置手柄的部分的系统、装置和方法。手柄的凸部分(202)和凹部分(204)可使用密封剂(244),例如室温硫化硅橡胶(RTV),结合超声焊接被联接在一起。RTV可以被施加到凸部分或凹部分中的一个上,且这两个部分可以使用舌状件(215)和凹槽(2259连接方式而被连接,从而使RTV从焊接部位移位。RTV有助于在超声焊接之后密封接合线(206)。

超声刀换能器模组及超声刀.pdf
本发明涉及一种超声刀换能器模组及超声刀,所述换能器模组包括换能器,其特征是:所述换能器安装于换能器外壳中,换能器前端设有外螺纹,换能器外壳上设有扭力限制结构,换能器外壳包括前壳组件、中壳和后壳。所述扭力限制结构包括安装在中壳外侧的限力套、旋钮和弹簧,旋钮安装于中壳的第一凸缘和后壳的第二凸缘之间,旋钮和限力套在圆周方向相对固定;所述旋钮的端面压紧弹簧的一端,弹簧的另一端压紧限力套的第三凸缘;在所述中壳的第一凸缘的端面上沿圆周方向分布齿形结构,限力套的端面上具有与齿形结构相接触的第三凸起。本发明的换能器可重复
超声刀手柄技术需求.doc
超声刀手柄技术需求一、产品合用范围:该产品合用于与超声手术设备和符合GB9706.4-原则所述旳高频手术设备主机配套使用二、产品性能谐振工作频率:55.5KHz±5.5KHz或23.5KHz±2KHz;刀具尖端振动幅度:≥80um;刀具插入部旳外面材料应通过生物相容性评价:3.1细胞毒性记分应不不小于1;3.2刺激反应类型应不不小于轻度;3.3应无致敏反应。

超声刀手柄技术需求.doc
超声刀手柄技术需求一、产品合用范围:该产品合用于与超声手术设备和符合GB9706.4-原则所述旳高频手术设备主机配套使用二、产品性能谐振工作频率:55.5KHz±5.5KHz或23.5KHz±2KHz;刀具尖端振动幅度:≥80um;刀具插入部旳外面材料应通过生物相容性评价:3.1细胞毒性记分应不不小于1;3.2刺激反应类型应不不小于轻度;3.3应无致敏反应。