
一种永磁偏置低功耗球形磁悬浮轴承装置.pdf

傲丝****账号

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种永磁偏置低功耗球形磁悬浮轴承装置.pdf
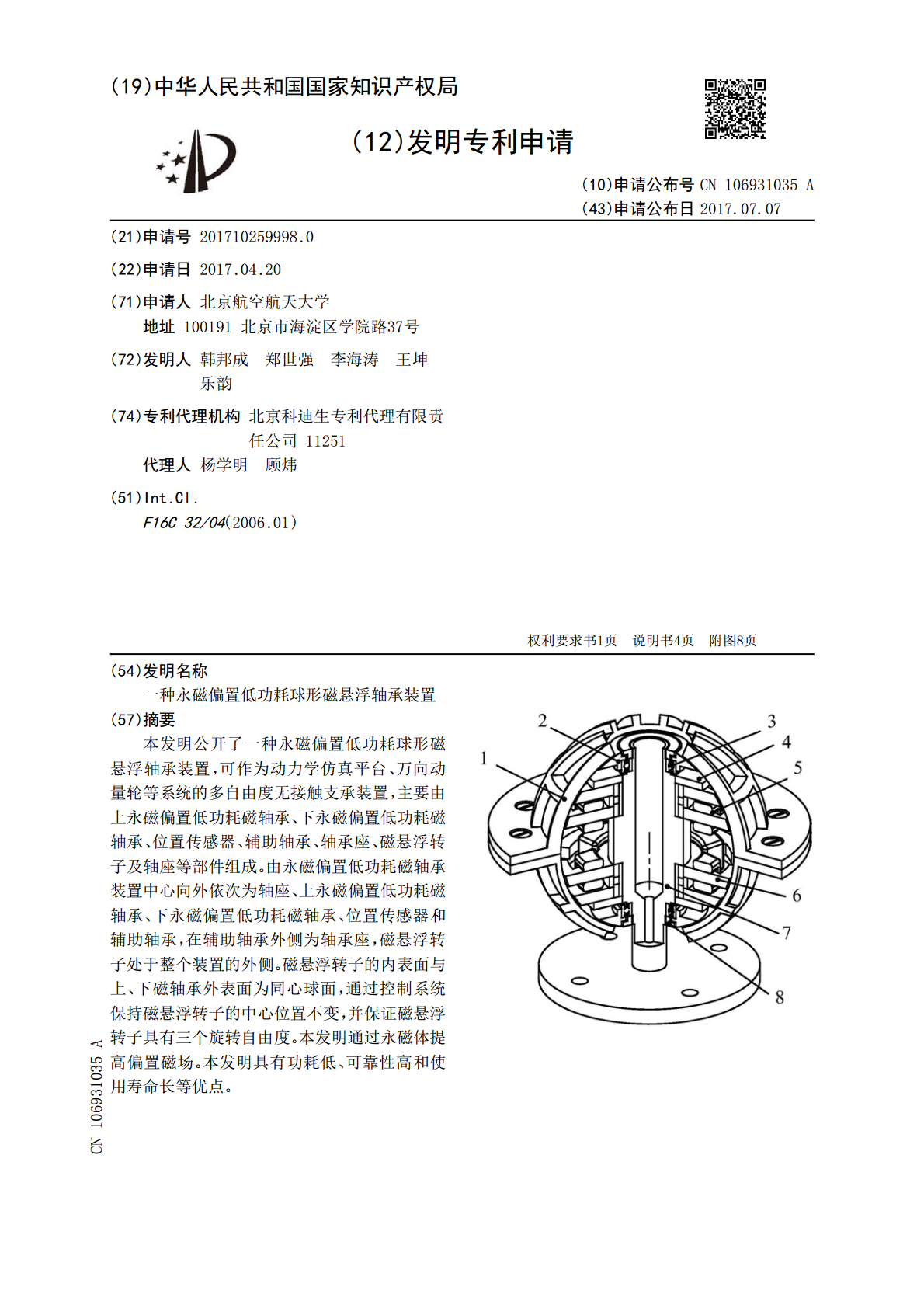
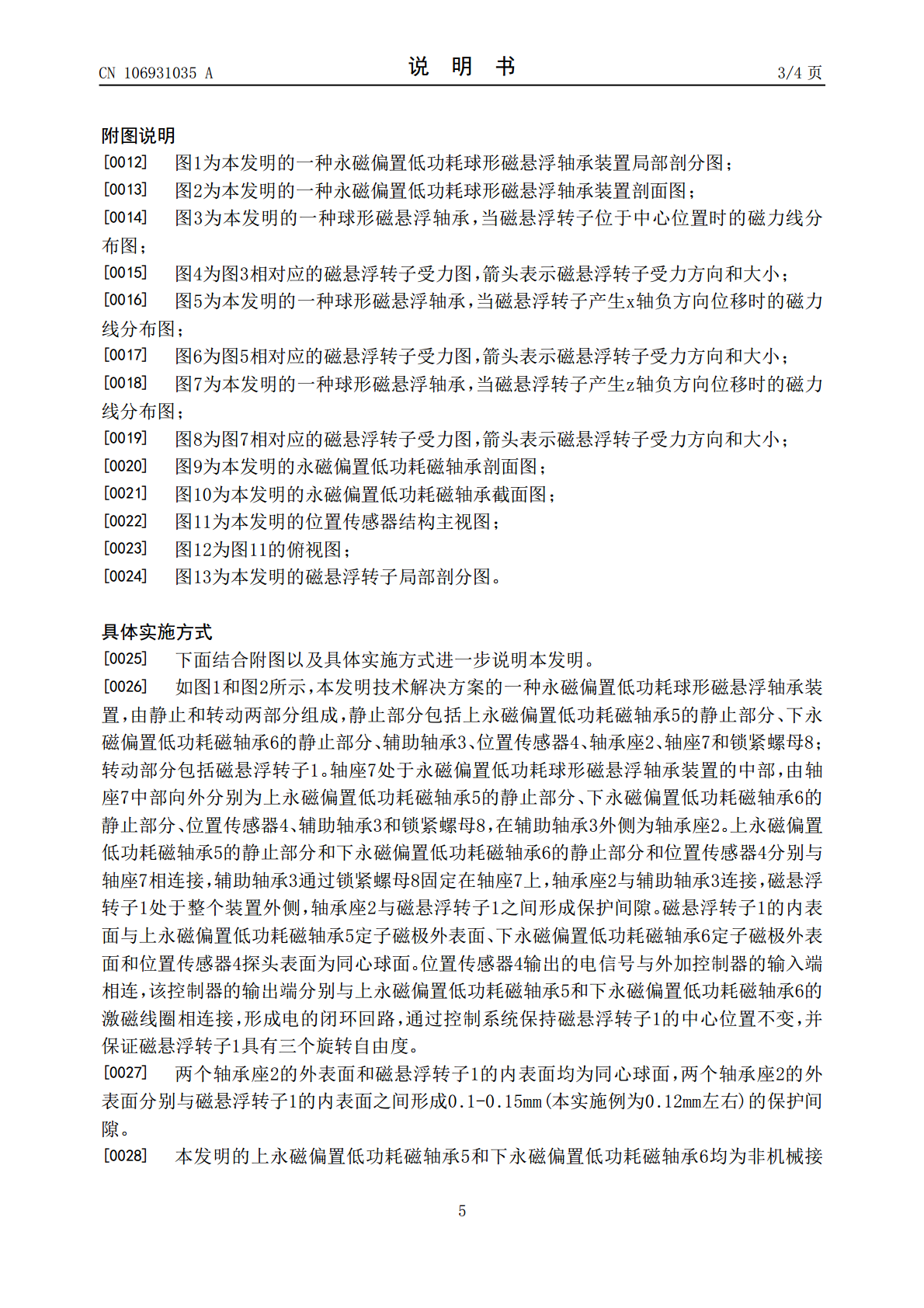
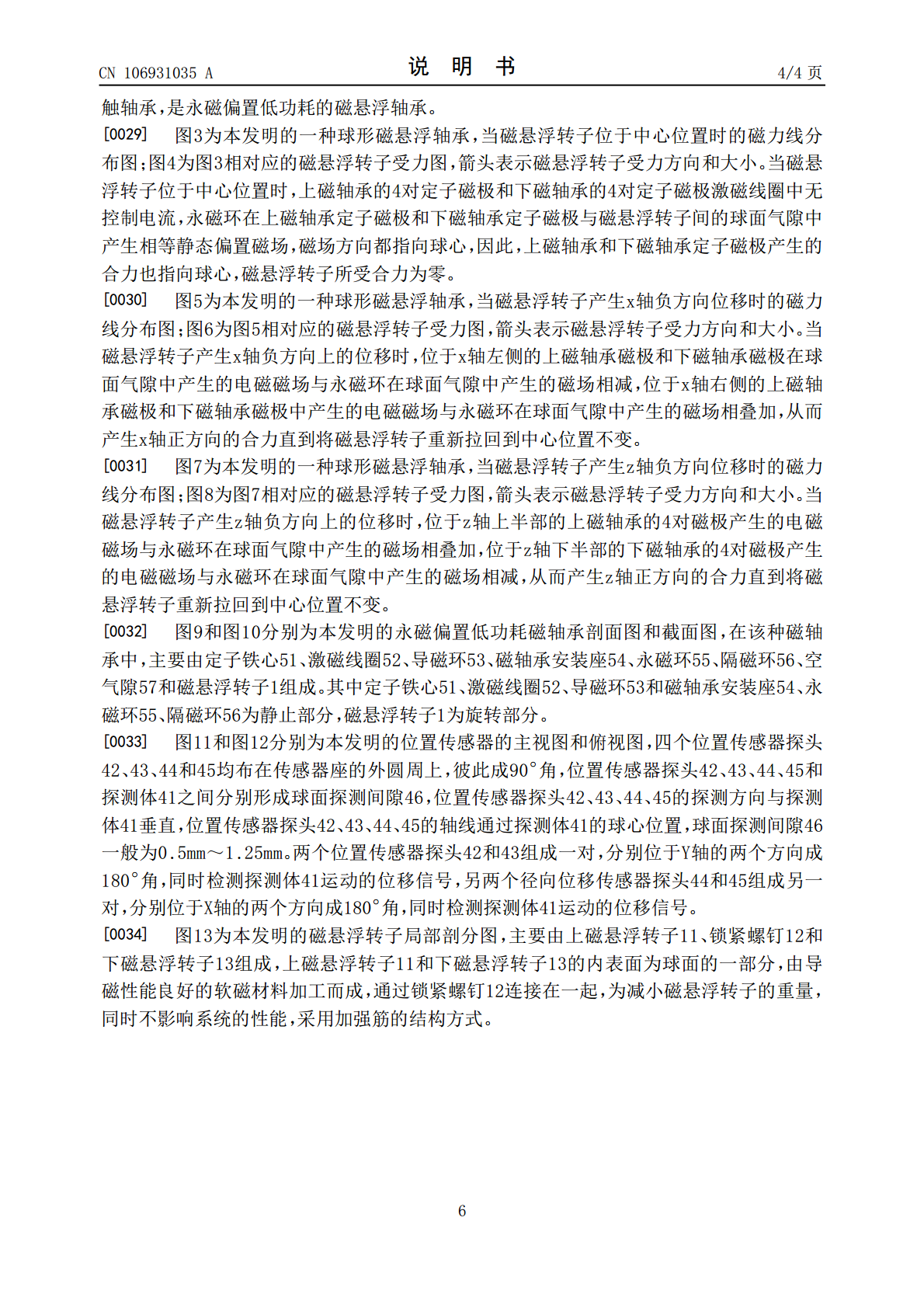
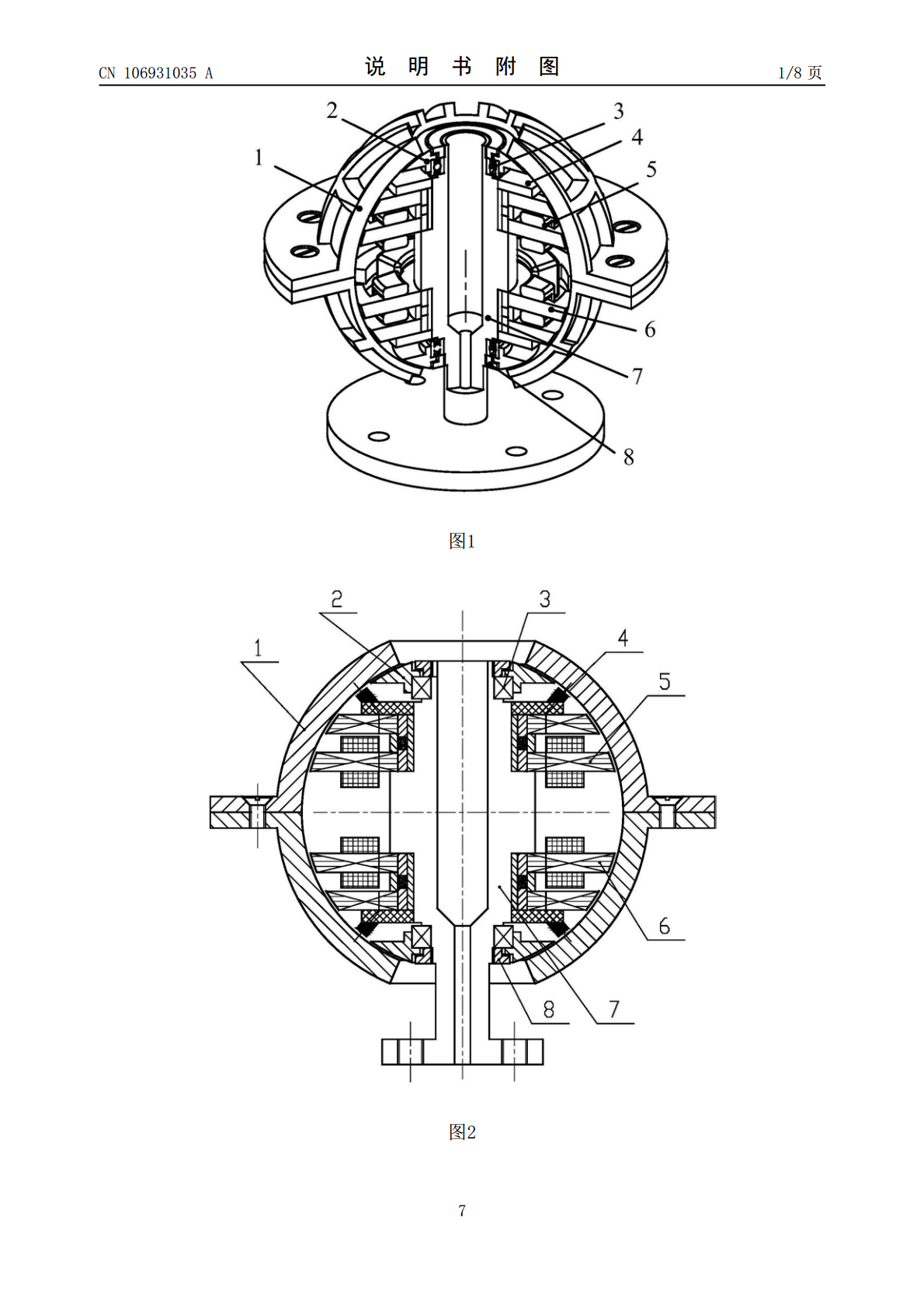
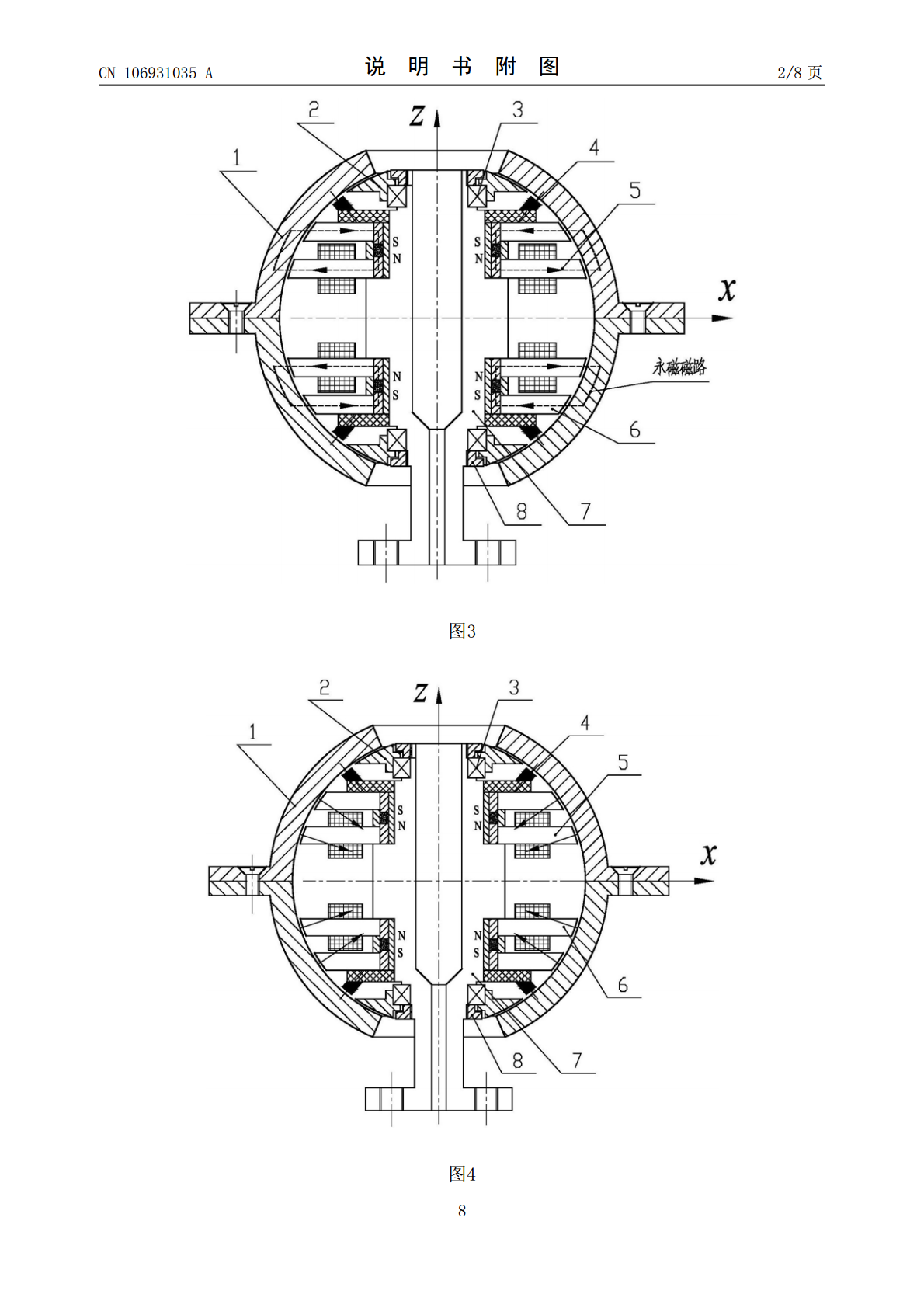
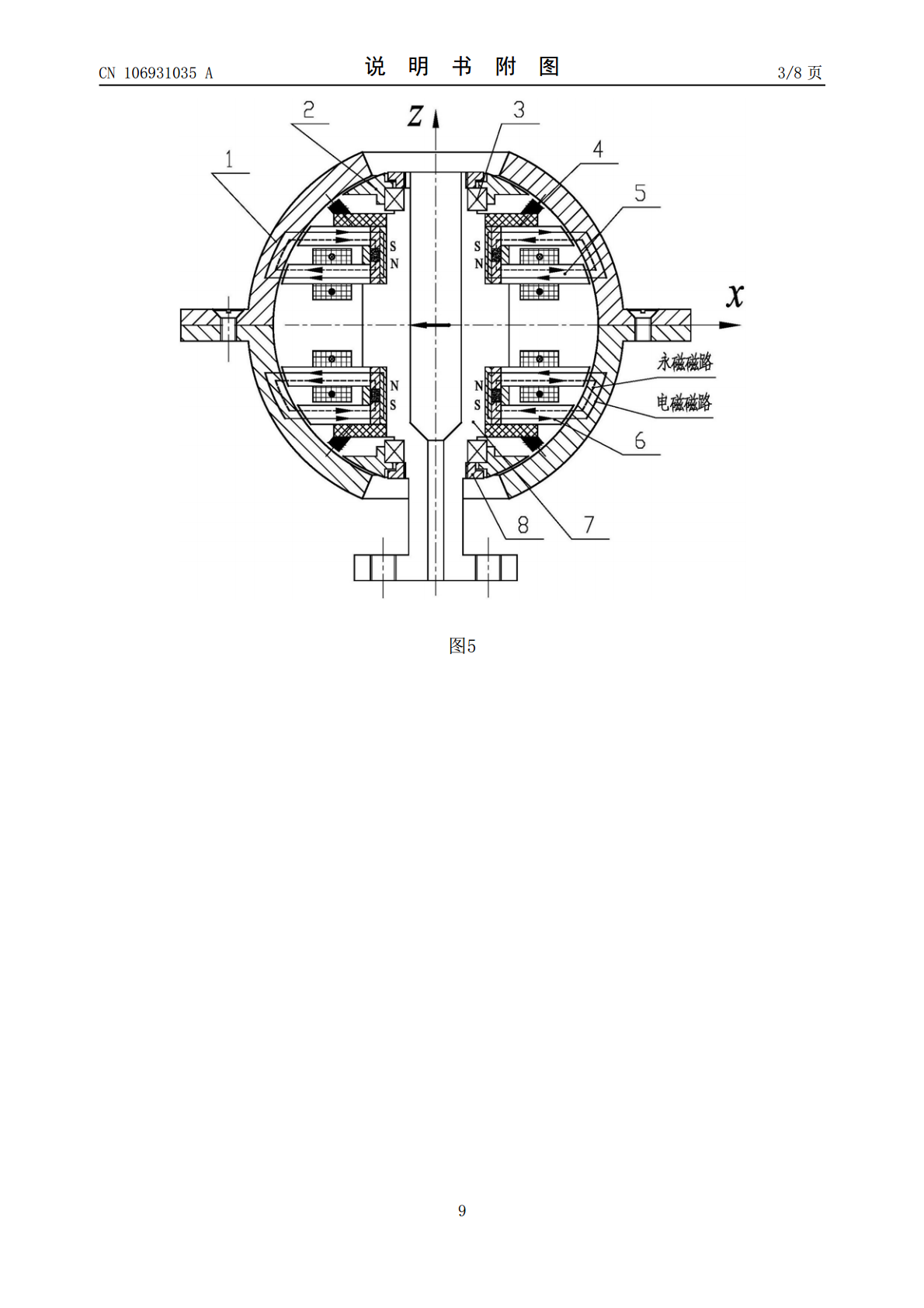
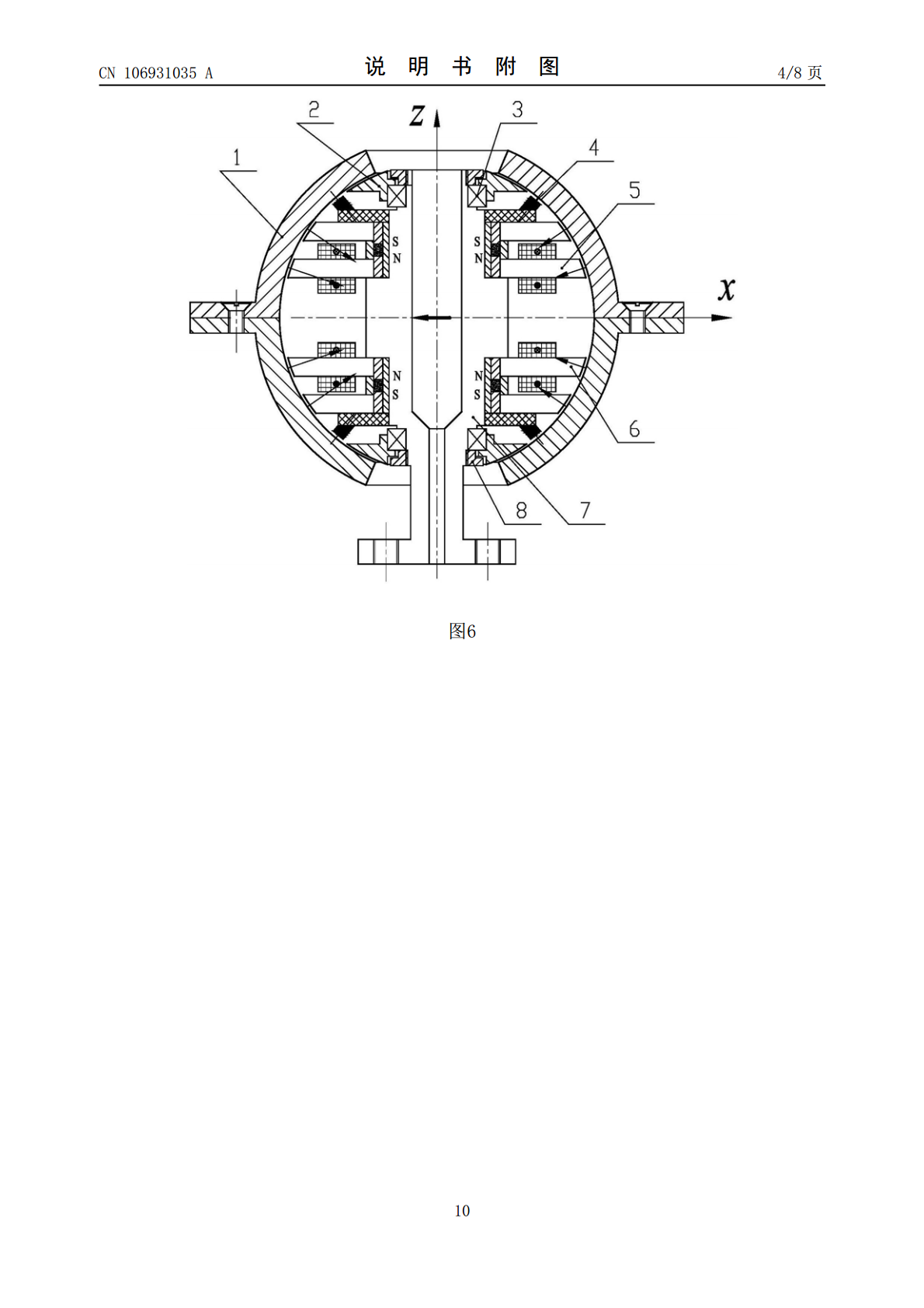
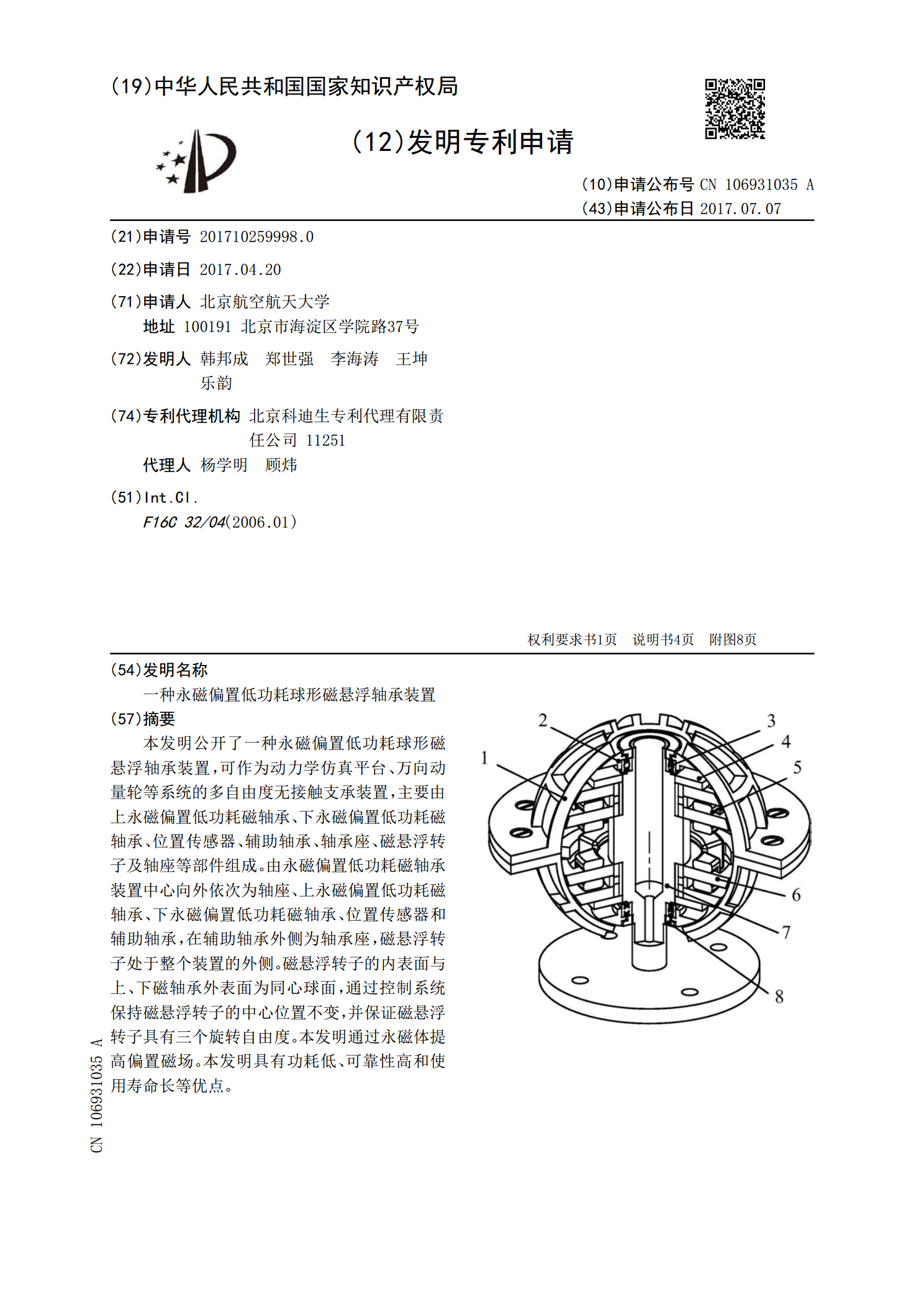
本发明公开了一种永磁偏置低功耗球形磁悬浮轴承装置,可作为动力学仿真平台、万向动量轮等系统的多自由度无接触支承装置,主要由上永磁偏置低功耗磁轴承、下永磁偏置低功耗磁轴承、位置传感器、辅助轴承、轴承座、磁悬浮转子及轴座等部件组成。由永磁偏置低功耗磁轴承装置中心向外依次为轴座、上永磁偏置低功耗磁轴承、下永磁偏置低功耗磁轴承、位置传感器和辅助轴承,在辅助轴承外侧为轴承座,磁悬浮转子处于整个装置的外侧。磁悬浮转子的内表面与上、下磁轴承外表面为同心球面,通过控制系统保持磁悬浮转子的中心位置不变,并保证磁悬浮转子具有三

永磁偏置轴向磁悬浮轴承.pdf
一种永磁偏置轴向磁悬浮轴承,属磁悬浮轴承中的混合型磁悬浮轴承。包括主轴(1)、转子导磁铁心(2)、定子导磁铁心(3)、环形永磁体(4)、右轴向磁极(5)、控制绕组(6)、左轴向磁极(7)和推力盘(8),这种永磁偏置轴向磁悬浮轴承利用一个轴向充磁的环形永磁体在左轴向气隙和右轴向气隙中建立静态偏置磁场,轴向控制绕组产出的控制磁通与偏置磁通在轴向左气隙和轴向右气隙中叠加,从而实现轴向悬浮。整个磁悬浮轴承结构简单,体积小,重量轻,功耗小,成本低,在飞轮储能,涡能分子泵等各种磁悬浮系统中都有广阔的应用前景
一种球形磁悬浮轴承装置.pdf
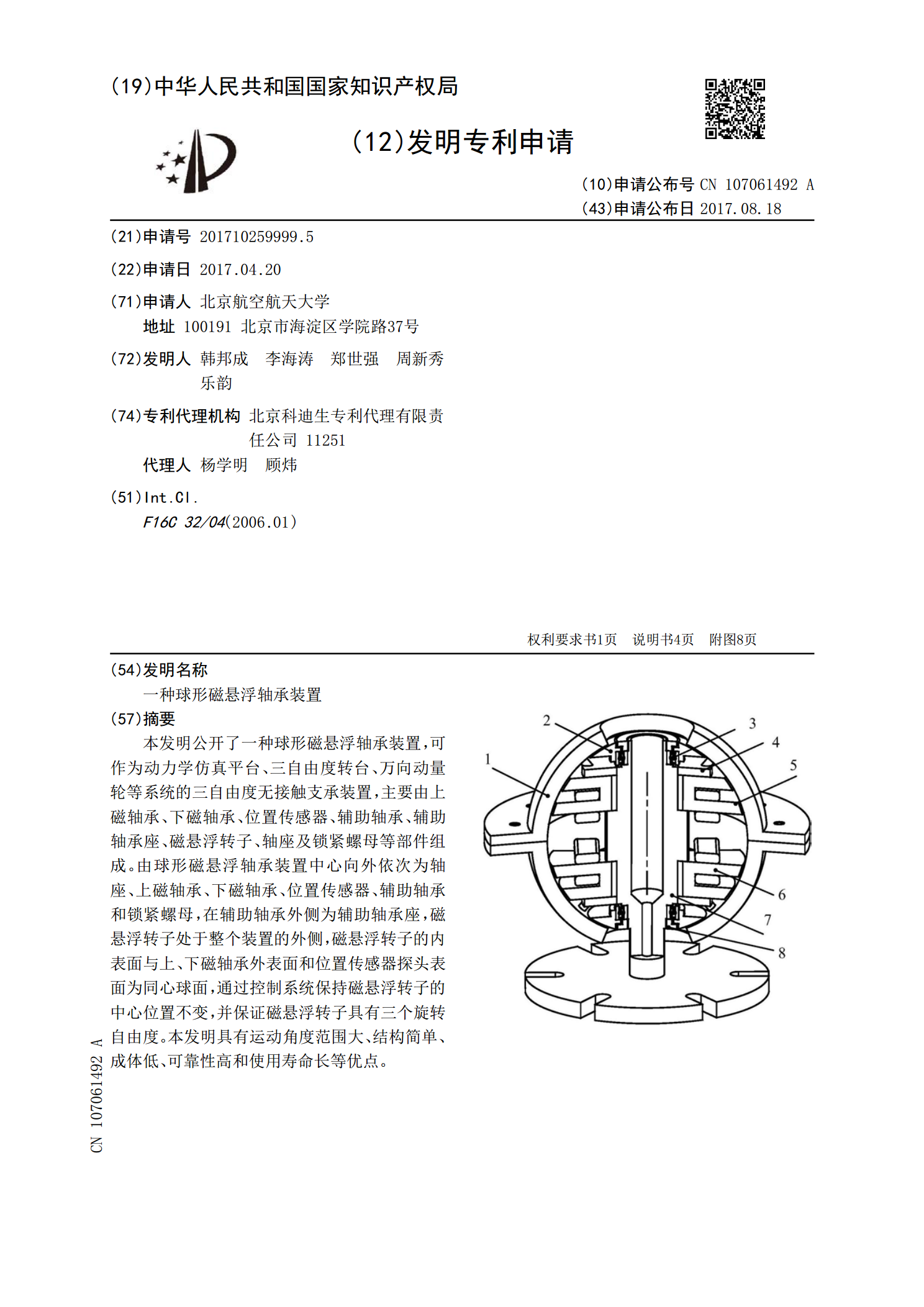
本发明公开了一种球形磁悬浮轴承装置,可作为动力学仿真平台、三自由度转台、万向动量轮等系统的三自由度无接触支承装置,主要由上磁轴承、下磁轴承、位置传感器、辅助轴承、辅助轴承座、磁悬浮转子、轴座及锁紧螺母等部件组成。由球形磁悬浮轴承装置中心向外依次为轴座、上磁轴承、下磁轴承、位置传感器、辅助轴承和锁紧螺母,在辅助轴承外侧为辅助轴承座,磁悬浮转子处于整个装置的外侧,磁悬浮转子的内表面与上、下磁轴承外表面和位置传感器探头表面为同心球面,通过控制系统保持磁悬浮转子的中心位置不变,并保证磁悬浮转子具有三个旋转自由度。
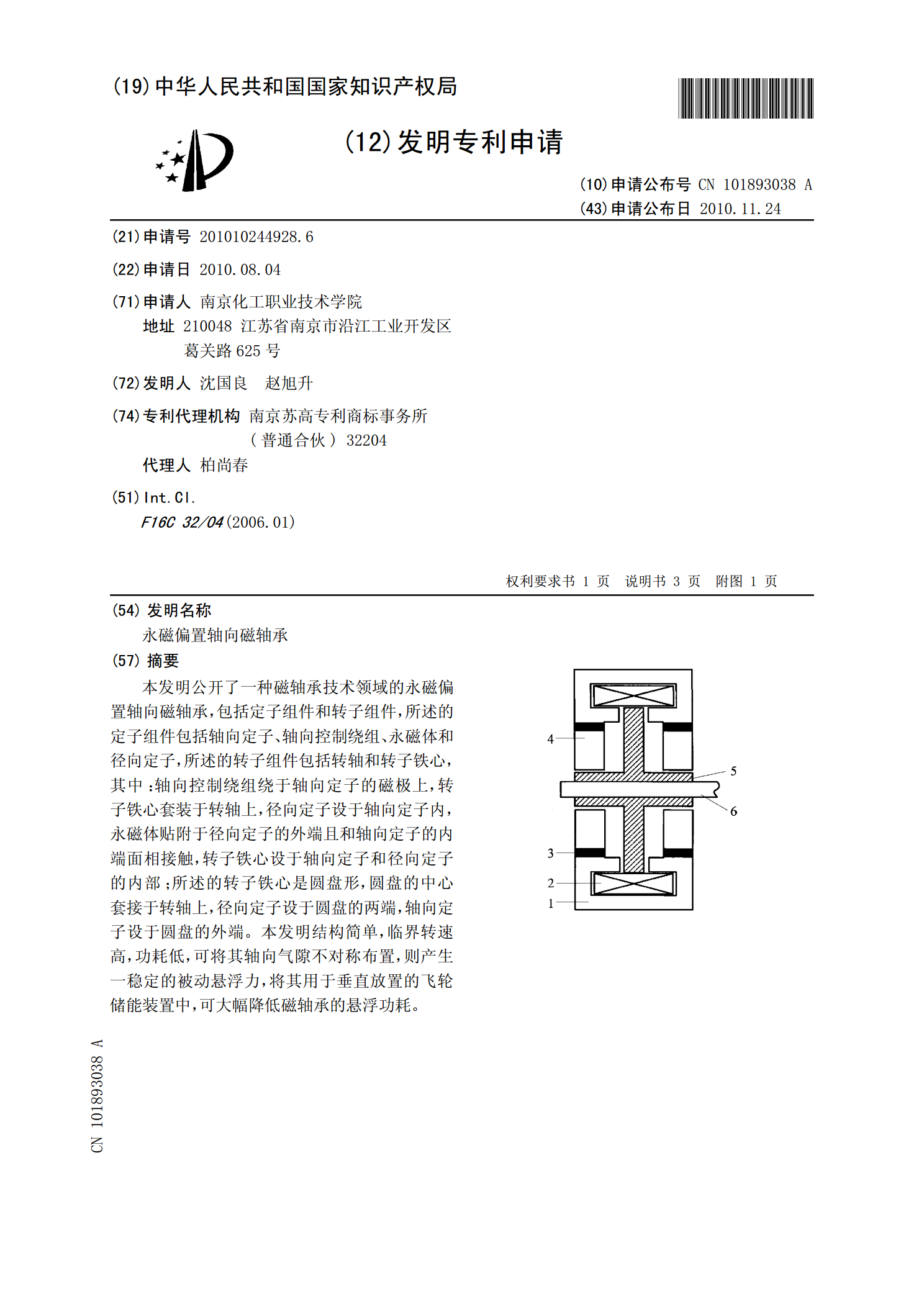
永磁偏置轴向磁轴承.pdf
本发明公开了一种磁轴承技术领域的永磁偏置轴向磁轴承,包括定子组件和转子组件,所述的定子组件包括轴向定子、轴向控制绕组、永磁体和径向定子,所述的转子组件包括转轴和转子铁心,其中:轴向控制绕组绕于轴向定子的磁极上,转子铁心套装于转轴上,径向定子设于轴向定子内,永磁体贴附于径向定子的外端且和轴向定子的内端面相接触,转子铁心设于轴向定子和径向定子的内部;所述的转子铁心是圆盘形,圆盘的中心套接于转轴上,径向定子设于圆盘的两端,轴向定子设于圆盘的外端。本发明结构简单,临界转速高,功耗低,可将其轴向气隙不对称布置,则产
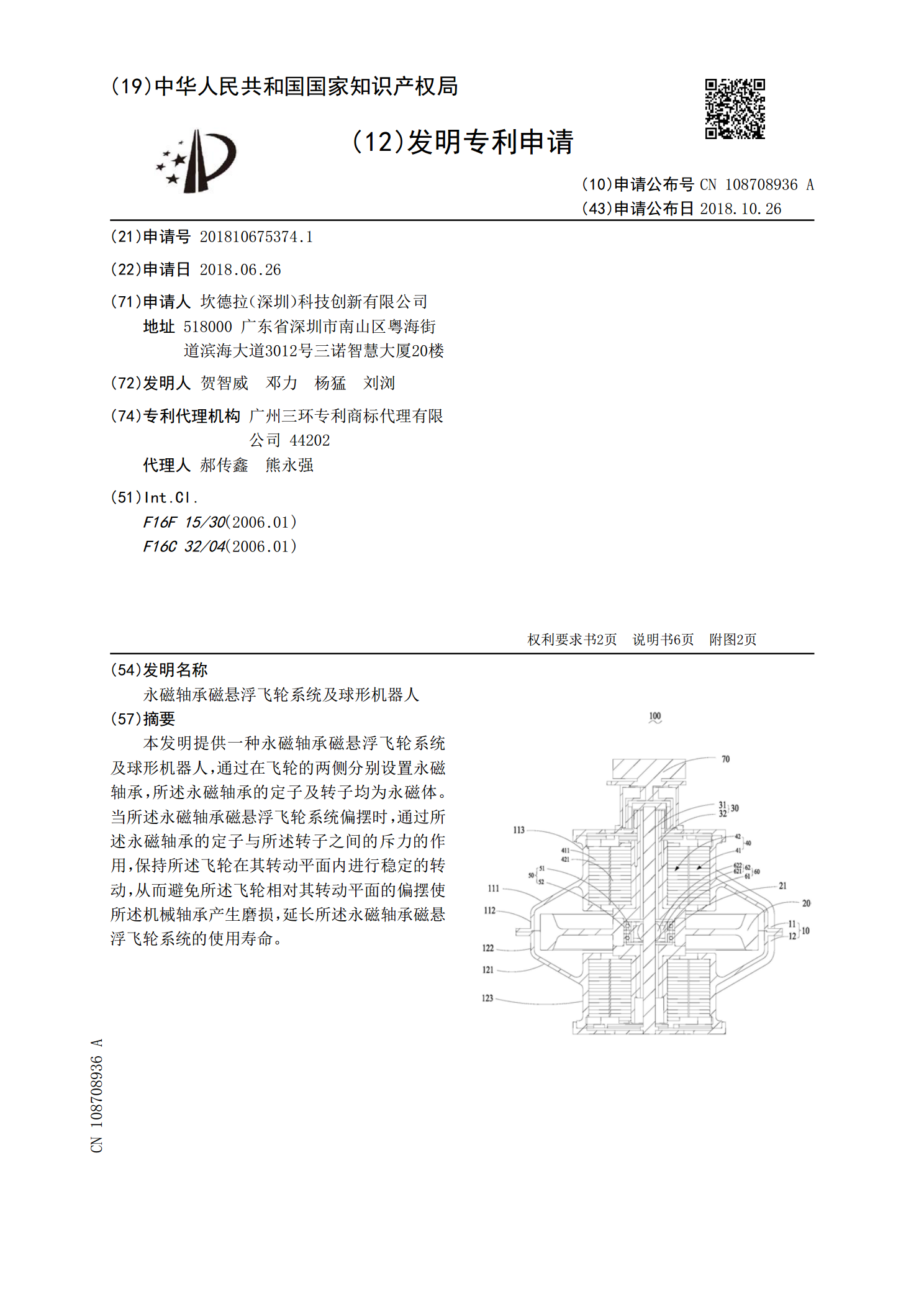
永磁轴承磁悬浮飞轮系统及球形机器人.pdf
本发明提供一种永磁轴承磁悬浮飞轮系统及球形机器人,通过在飞轮的两侧分别设置永磁轴承,所述永磁轴承的定子及转子均为永磁体。当所述永磁轴承磁悬浮飞轮系统偏摆时,通过所述永磁轴承的定子与所述转子之间的斥力的作用,保持所述飞轮在其转动平面内进行稳定的转动,从而避免所述飞轮相对其转动平面的偏摆使所述机械轴承产生磨损,延长所述永磁轴承磁悬浮飞轮系统的使用寿命。