
一种微小型多翼仿生扑翼飞行器.pdf

努力****星驰

1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种微小型多翼仿生扑翼飞行器.pdf
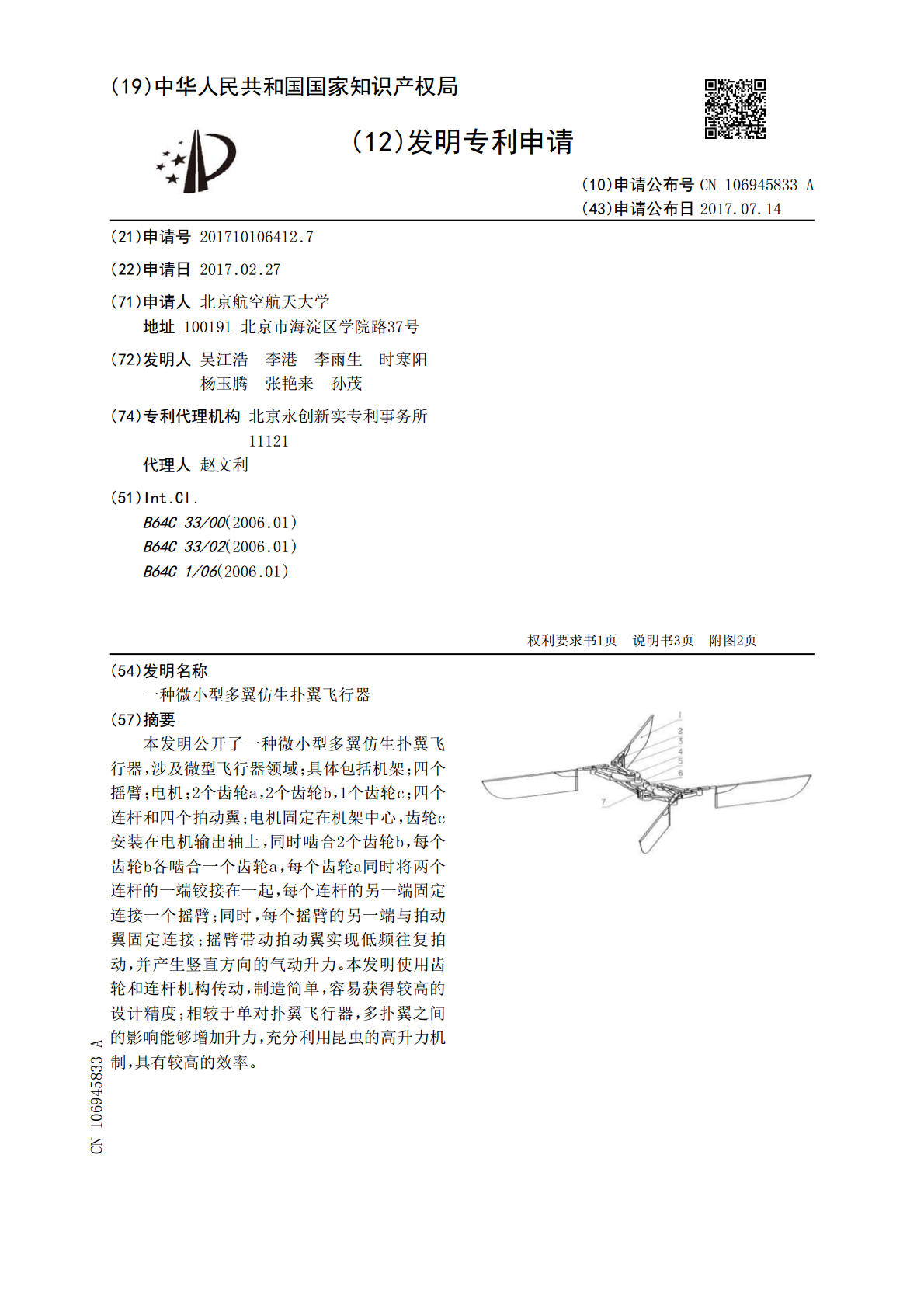
本发明公开了一种微小型多翼仿生扑翼飞行器,涉及微型飞行器领域;具体包括机架;四个摇臂;电机;2个齿轮a,2个齿轮b,1个齿轮c;四个连杆和四个拍动翼;电机固定在机架中心,齿轮c安装在电机输出轴上,同时啮合2个齿轮b,每个齿轮b各啮合一个齿轮a,每个齿轮a同时将两个连杆的一端铰接在一起,每个连杆的另一端固定连接一个摇臂;同时,每个摇臂的另一端与拍动翼固定连接;摇臂带动拍动翼实现低频往复拍动,并产生竖直方向的气动升力。本发明使用齿轮和连杆机构传动,制造简单,容易获得较高的设计精度;相较于单对扑翼飞行器,多扑翼
仿生扑翼飞行器.pdf
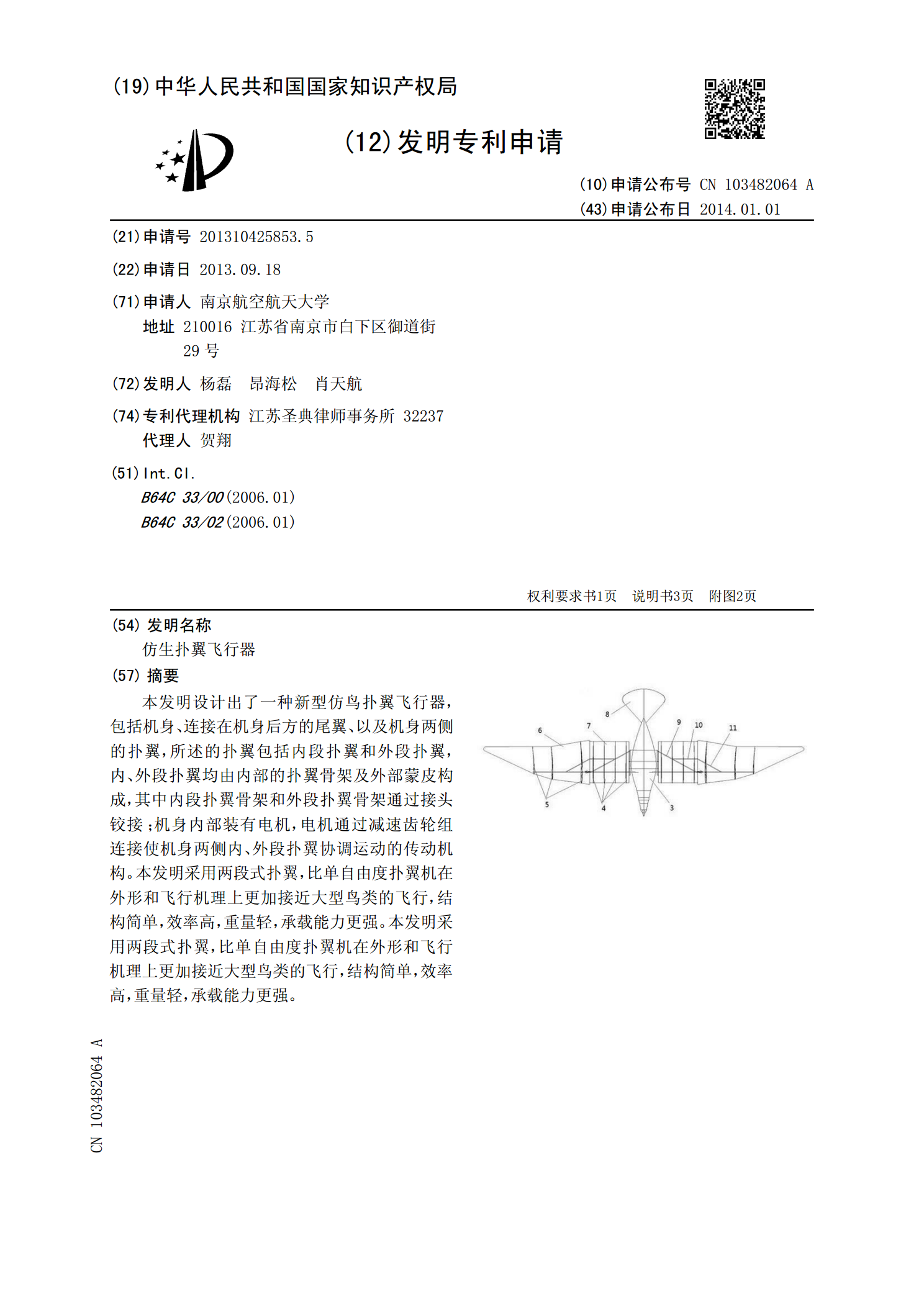
本发明设计出了一种新型仿鸟扑翼飞行器,包括机身、连接在机身后方的尾翼、以及机身两侧的扑翼,所述的扑翼包括内段扑翼和外段扑翼,内、外段扑翼均由内部的扑翼骨架及外部蒙皮构成,其中内段扑翼骨架和外段扑翼骨架通过接头铰接;机身内部装有电机,电机通过减速齿轮组连接使机身两侧内、外段扑翼协调运动的传动机构。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率高,重量轻,承载能力更强。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率
一种仿生扑翼飞行器.pdf
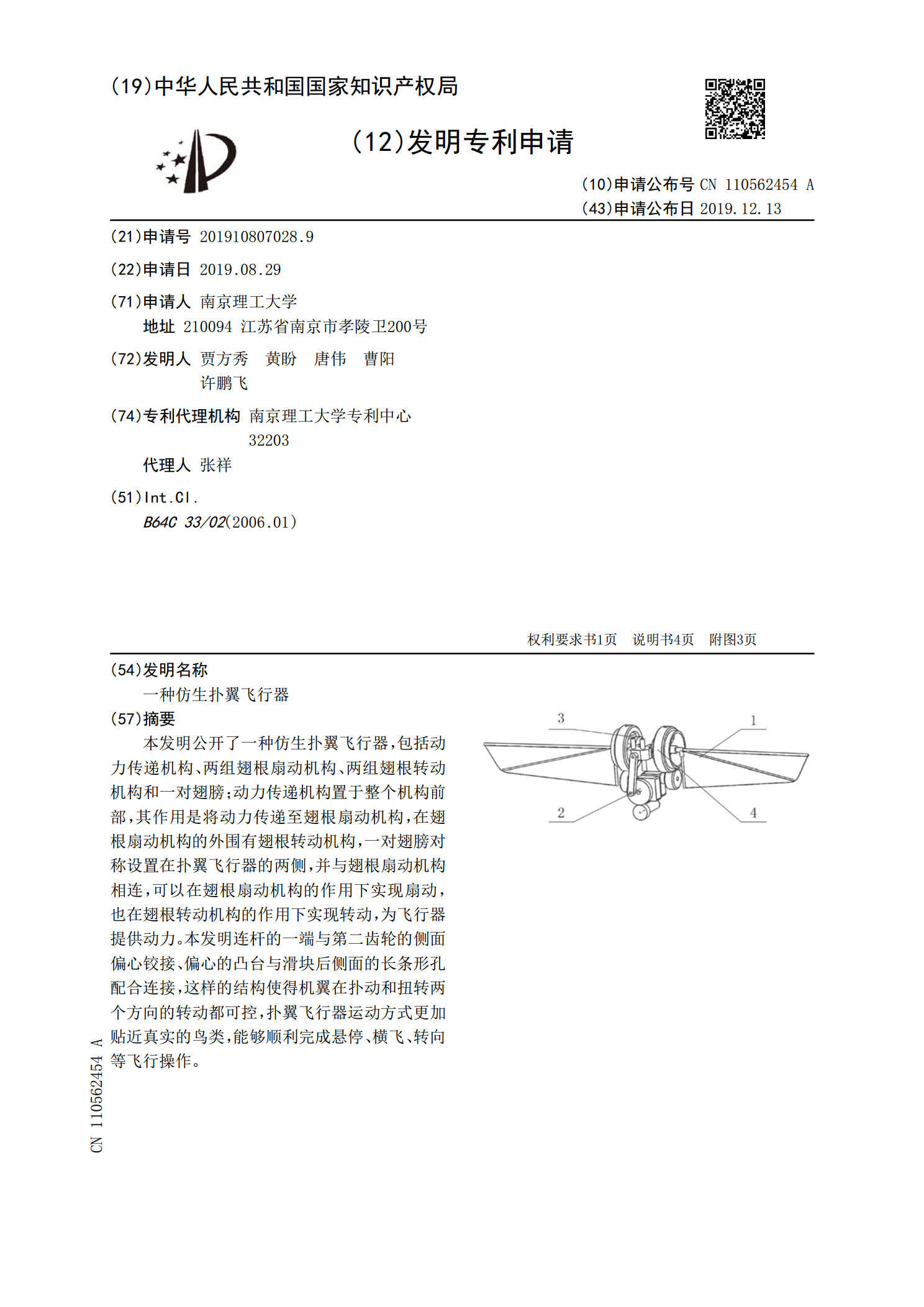
本发明公开了一种仿生扑翼飞行器,包括动力传递机构、两组翅根扇动机构、两组翅根转动机构和一对翅膀;动力传递机构置于整个机构前部,其作用是将动力传递至翅根扇动机构,在翅根扇动机构的外围有翅根转动机构,一对翅膀对称设置在扑翼飞行器的两侧,并与翅根扇动机构相连,可以在翅根扇动机构的作用下实现扇动,也在翅根转动机构的作用下实现转动,为飞行器提供动力。本发明连杆的一端与第二齿轮的侧面偏心铰接、偏心的凸台与滑块后侧面的长条形孔配合连接,这样的结构使得机翼在扑动和扭转两个方向的转动都可控,扑翼飞行器运动方式更加贴近真实的
仿生蜂鸟扑翼飞行器.pdf
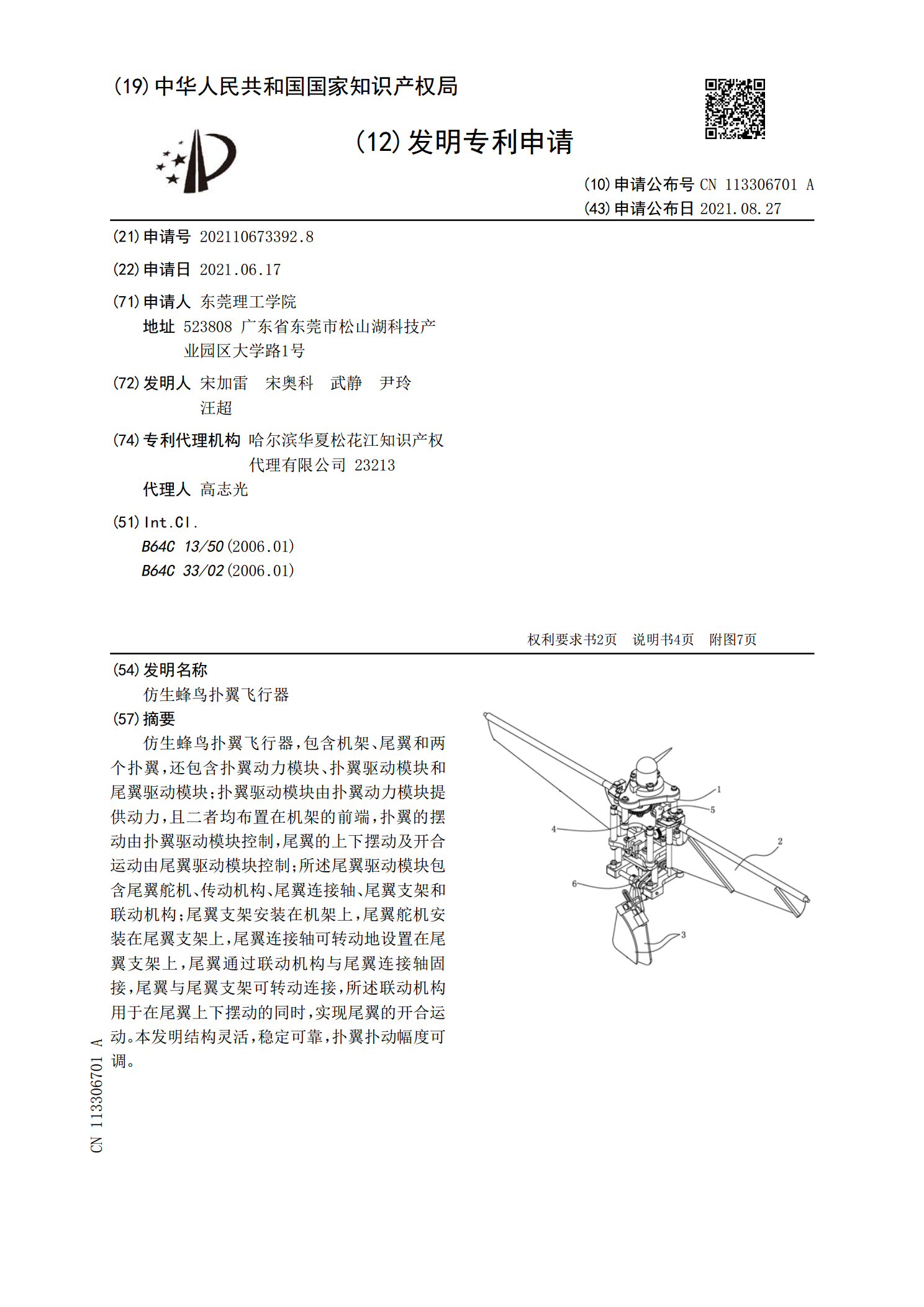
仿生蜂鸟扑翼飞行器,包含机架、尾翼和两个扑翼,还包含扑翼动力模块、扑翼驱动模块和尾翼驱动模块;扑翼驱动模块由扑翼动力模块提供动力,且二者均布置在机架的前端,扑翼的摆动由扑翼驱动模块控制,尾翼的上下摆动及开合运动由尾翼驱动模块控制;所述尾翼驱动模块包含尾翼舵机、传动机构、尾翼连接轴、尾翼支架和联动机构;尾翼支架安装在机架上,尾翼舵机安装在尾翼支架上,尾翼连接轴可转动地设置在尾翼支架上,尾翼通过联动机构与尾翼连接轴固接,尾翼与尾翼支架可转动连接,所述联动机构用于在尾翼上下摆动的同时,实现尾翼的开合运动。本发明
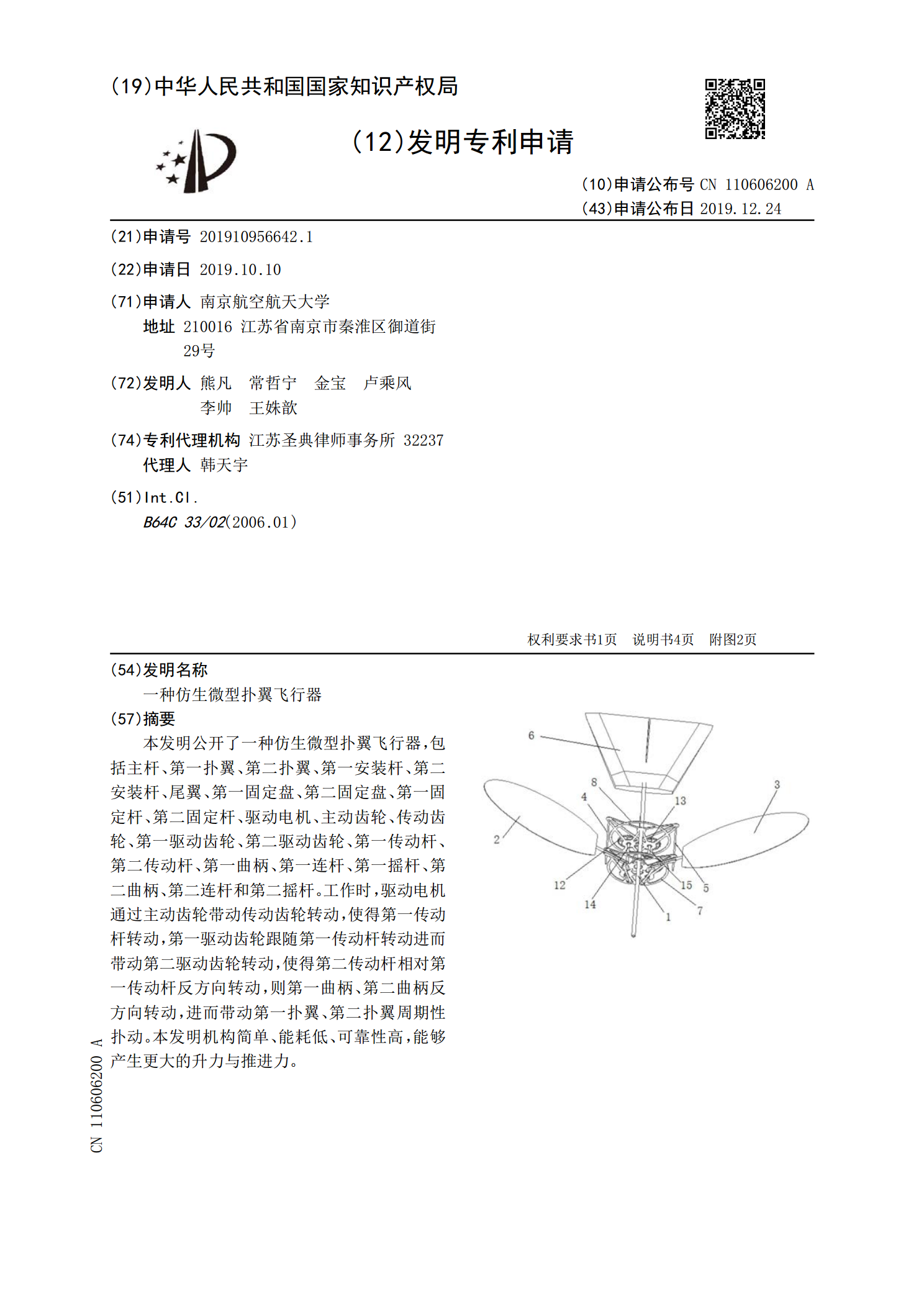
一种仿生微型扑翼飞行器.pdf
本发明公开了一种仿生微型扑翼飞行器,包括主杆、第一扑翼、第二扑翼、第一安装杆、第二安装杆、尾翼、第一固定盘、第二固定盘、第一固定杆、第二固定杆、驱动电机、主动齿轮、传动齿轮、第一驱动齿轮、第二驱动齿轮、第一传动杆、第二传动杆、第一曲柄、第一连杆、第一摇杆、第二曲柄、第二连杆和第二摇杆。工作时,驱动电机通过主动齿轮带动传动齿轮转动,使得第一传动杆转动,第一驱动齿轮跟随第一传动杆转动进而带动第二驱动齿轮转动,使得第二传动杆相对第一传动杆反方向转动,则第一曲柄、第二曲柄反方向转动,进而带动第一扑翼、第二扑翼周期