
一种轮式按摩机器人.pdf

佳宁****么啦

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式按摩机器人.pdf
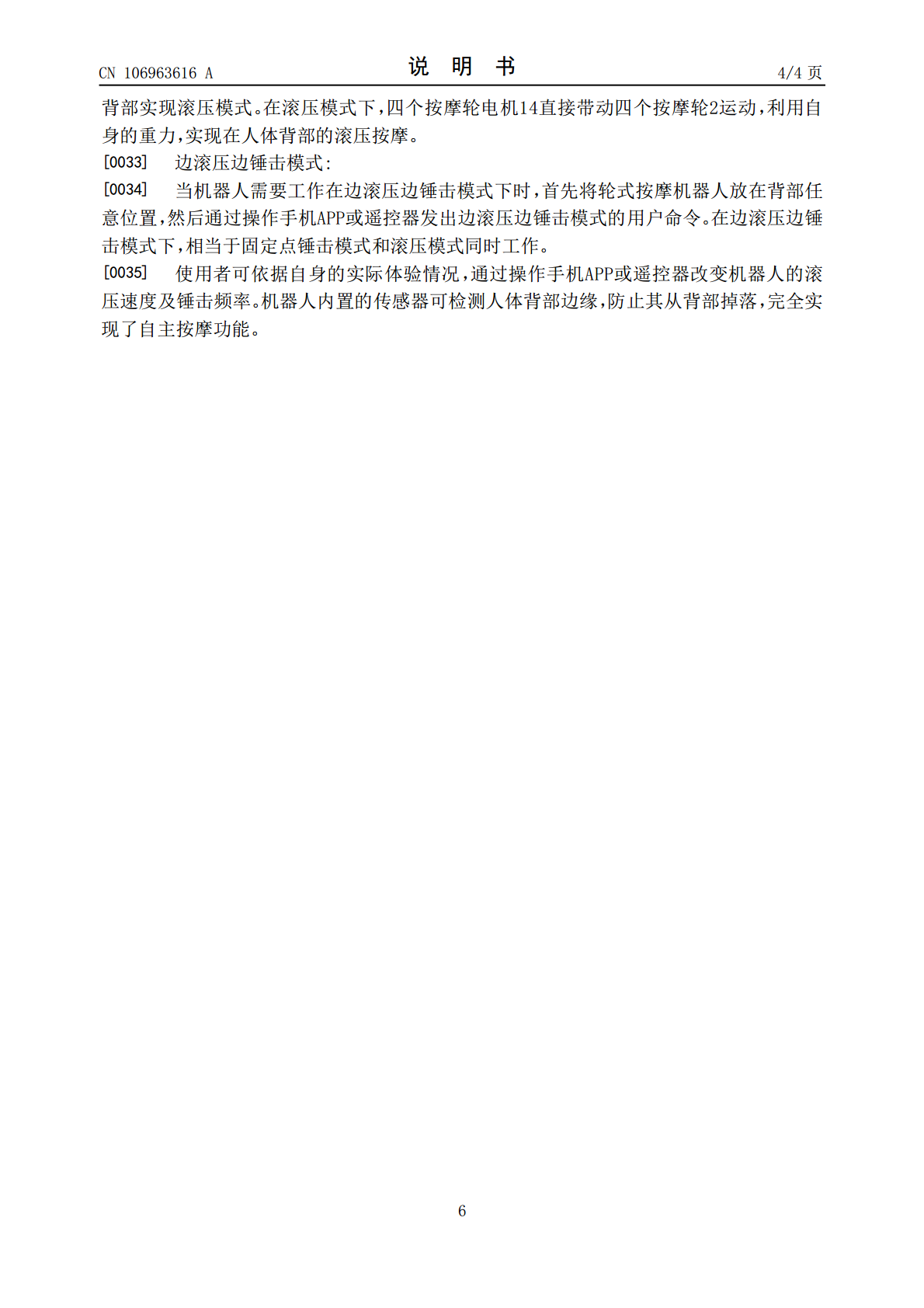
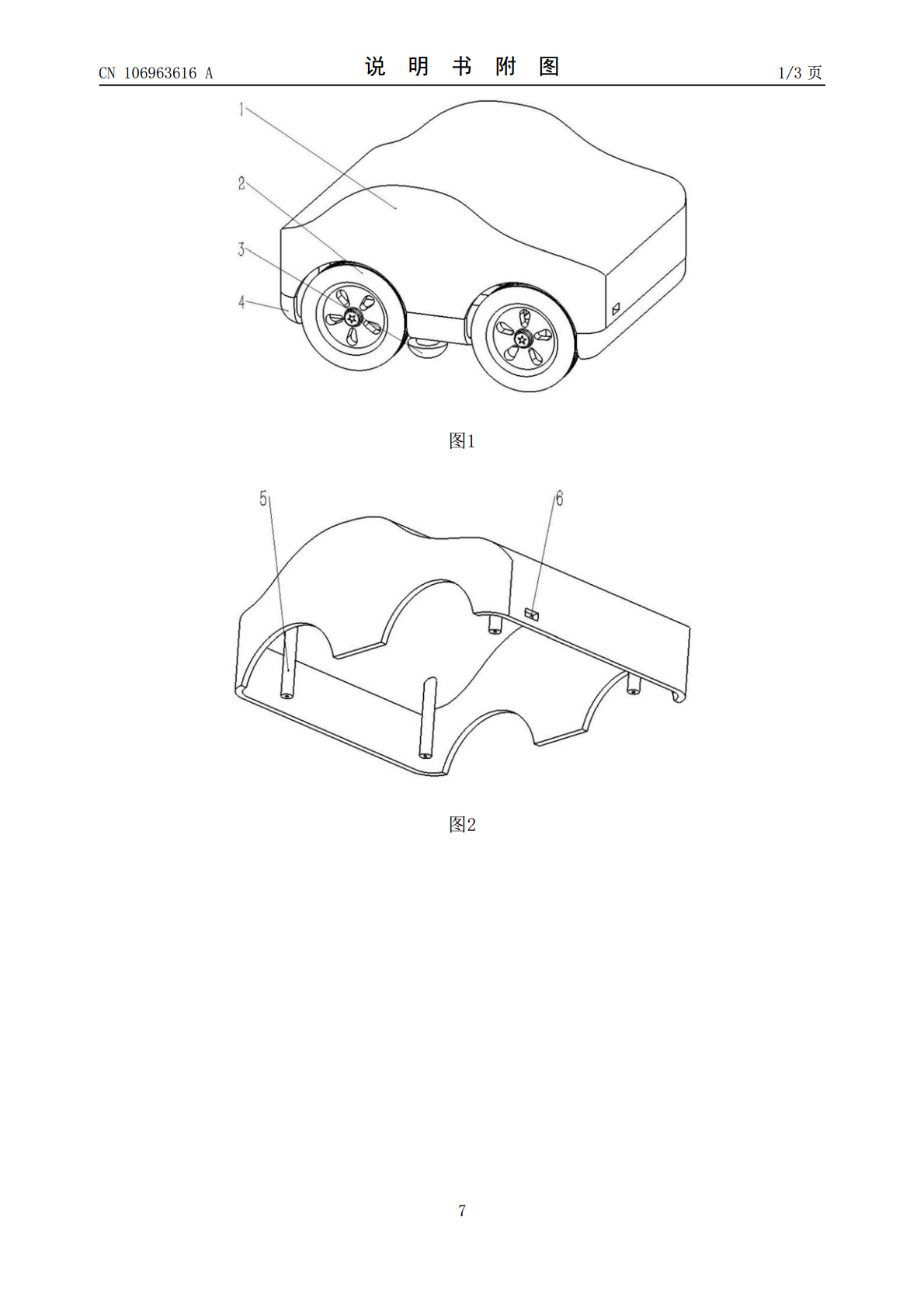
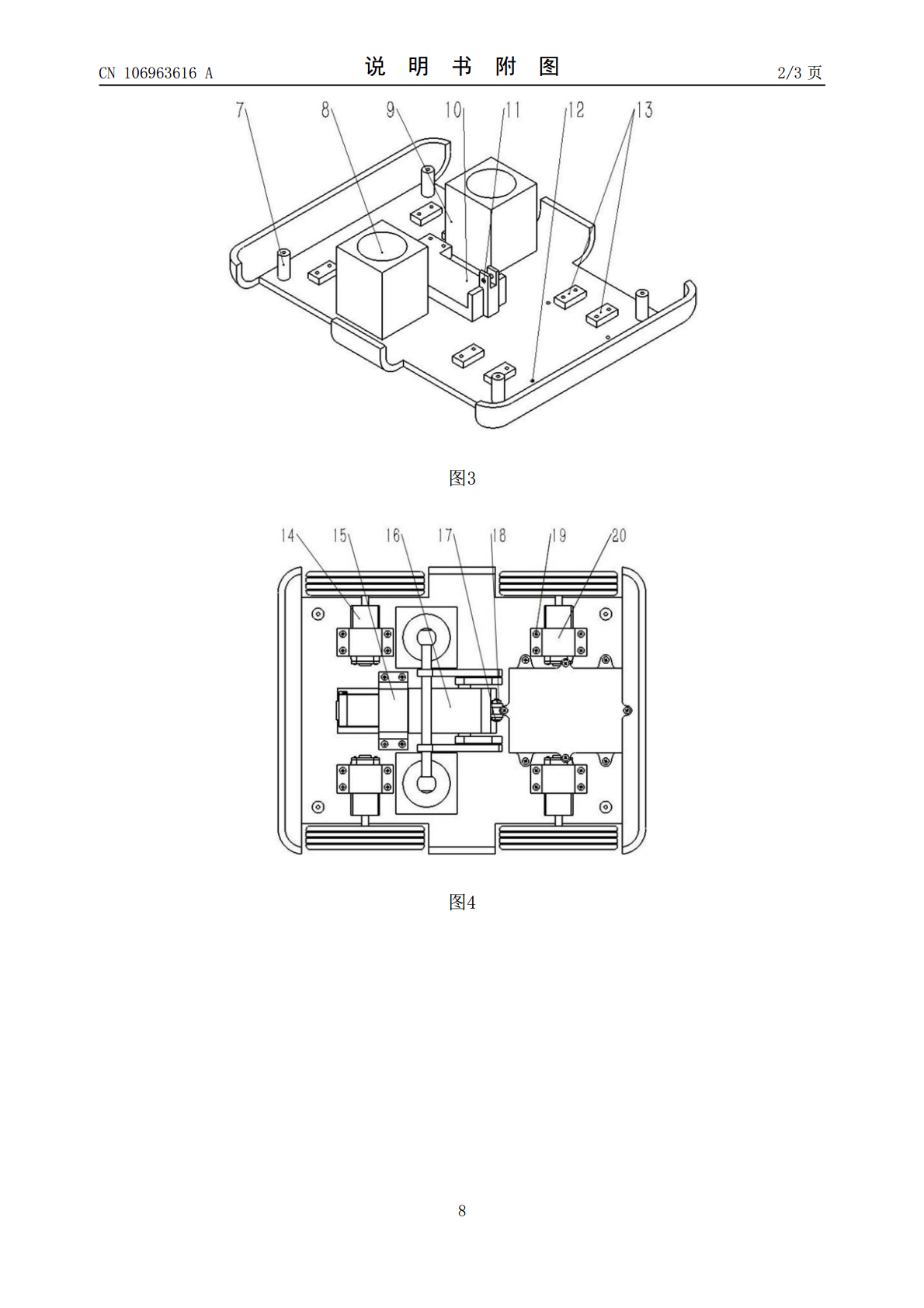
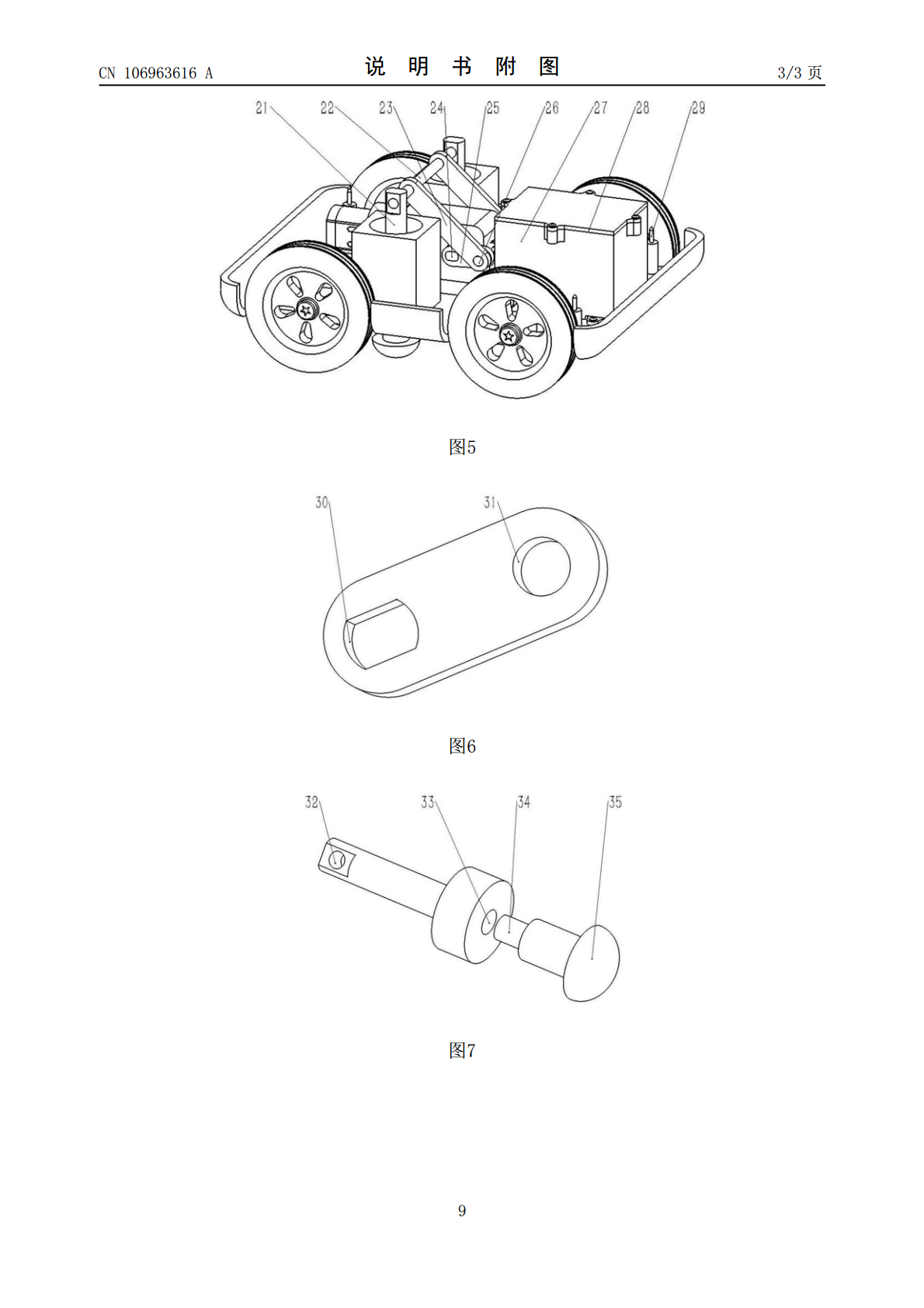
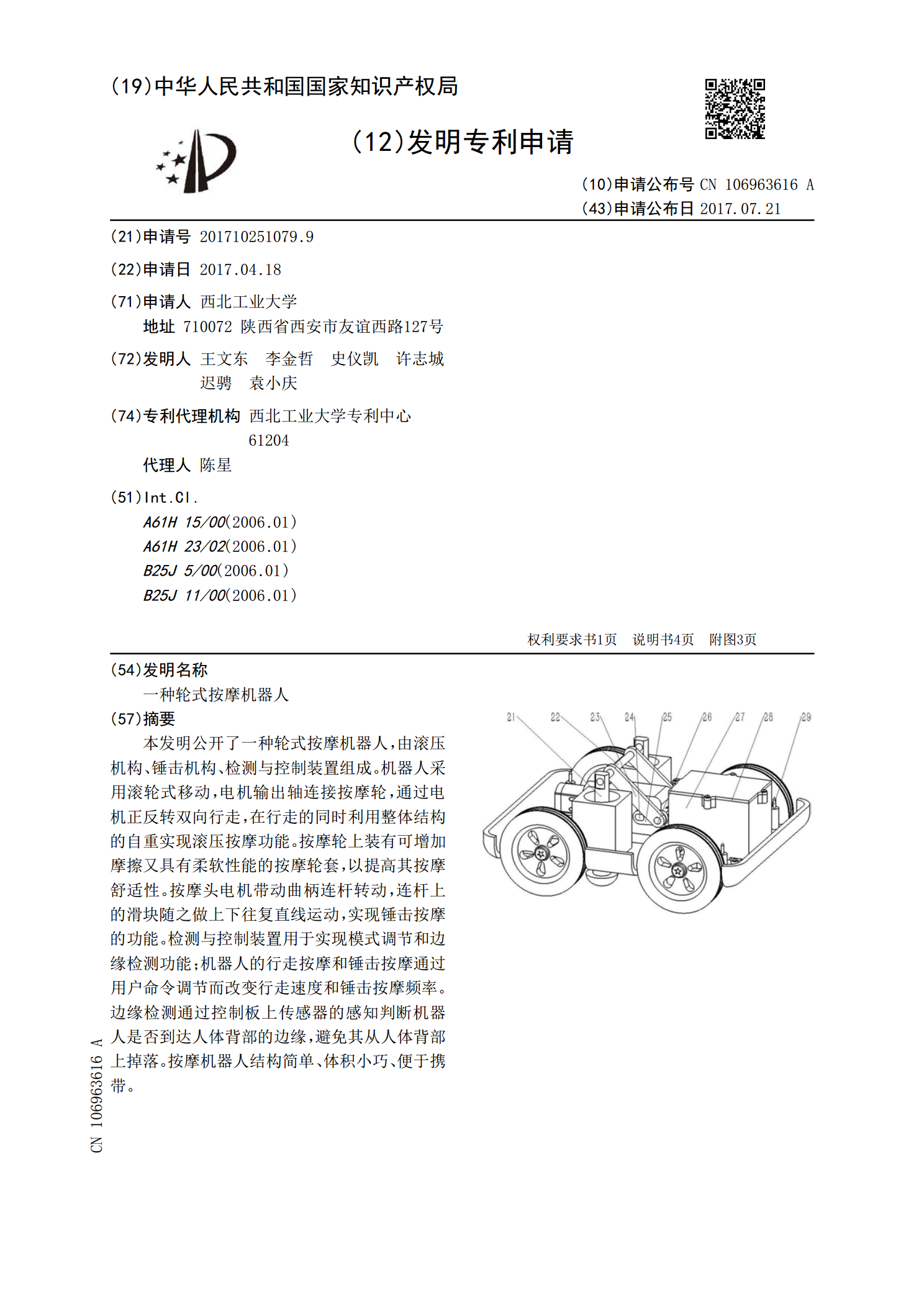
本发明公开了一种轮式按摩机器人,由滚压机构、锤击机构、检测与控制装置组成。机器人采用滚轮式移动,电机输出轴连接按摩轮,通过电机正反转双向行走,在行走的同时利用整体结构的自重实现滚压按摩功能。按摩轮上装有可增加摩擦又具有柔软性能的按摩轮套,以提高其按摩舒适性。按摩头电机带动曲柄连杆转动,连杆上的滑块随之做上下往复直线运动,实现锤击按摩的功能。检测与控制装置用于实现模式调节和边缘检测功能;机器人的行走按摩和锤击按摩通过用户命令调节而改变行走速度和锤击按摩频率。边缘检测通过控制板上传感器的感知判断机器人是否到达

一种转轮式按摩组件.pdf
本发明提出了一种转轮式按摩组件,包括第一盖体、第二盖体和按摩机构;按摩机构设置在第一盖体与第二盖体之间,按摩机构包括转动件、转轮按摩件和驱动件,转动件两端分别与第一盖体、第二盖体转动连接,转轮按摩件安装在转动件上并可随着转动件的转动而转动,驱动件与转动件传动连接并用于驱动转动件转动。本发明采用可调向的齿轮组驱动,实现了多组按摩轮同向或反向转动按摩,实现了多组按摩轮同向中间方向转动产生内收力有加紧感觉的按摩体验或同时反向外部方向转动产生外拨力有放松感觉的按摩体验;同时按摩轮本体采用大轮盘带多个小轮的结构,实
一种凸轮式便携腰椎按摩仪及其按摩方法.pdf
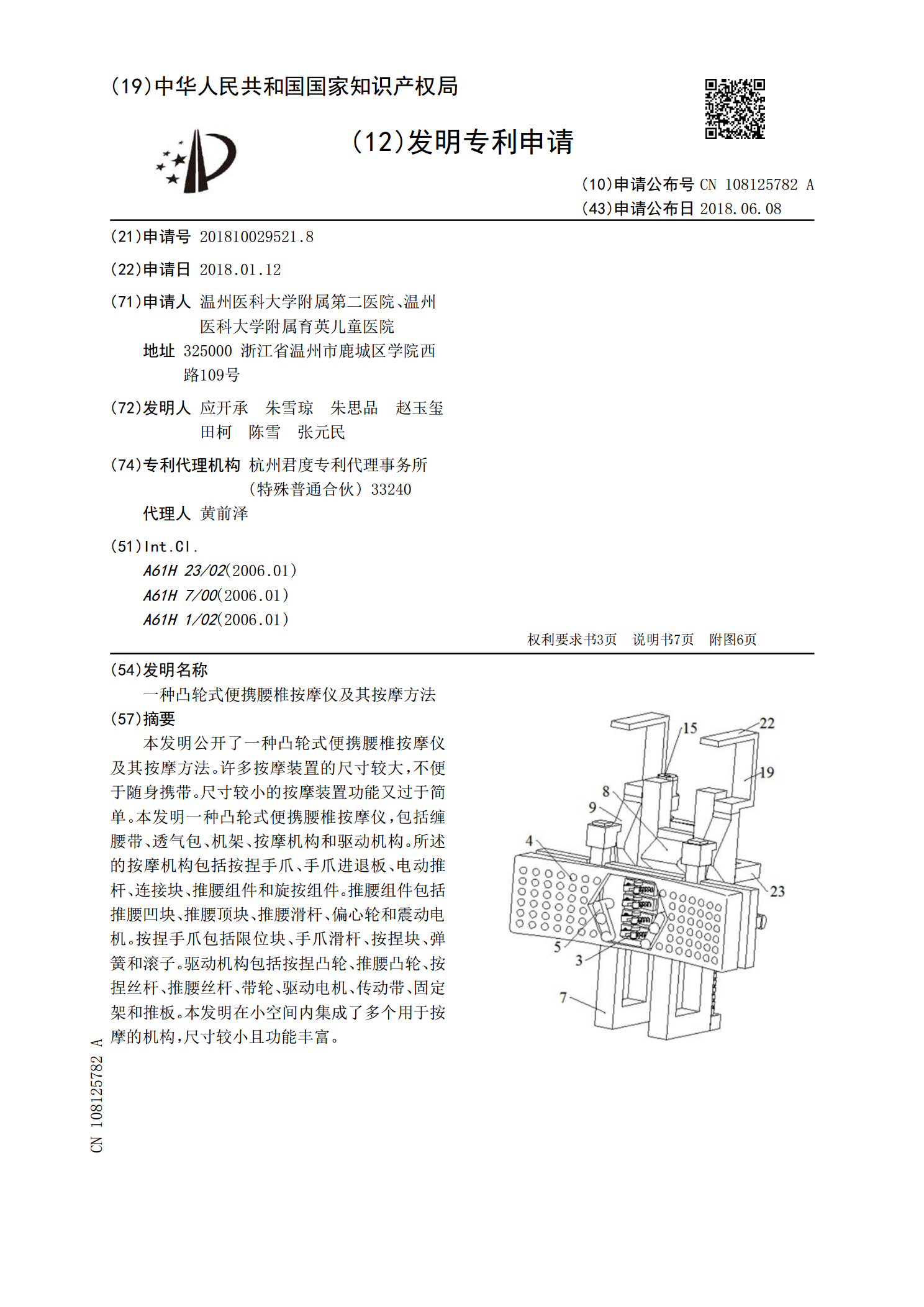
本发明公开了一种凸轮式便携腰椎按摩仪及其按摩方法。许多按摩装置的尺寸较大,不便于随身携带。尺寸较小的按摩装置功能又过于简单。本发明一种凸轮式便携腰椎按摩仪,包括缠腰带、透气包、机架、按摩机构和驱动机构。所述的按摩机构包括按捏手爪、手爪进退板、电动推杆、连接块、推腰组件和旋按组件。推腰组件包括推腰凹块、推腰顶块、推腰滑杆、偏心轮和震动电机。按捏手爪包括限位块、手爪滑杆、按捏块、弹簧和滚子。驱动机构包括按捏凸轮、推腰凸轮、按捏丝杆、推腰丝杆、带轮、驱动电机、传动带、固定架和推板。本发明在小空间内集成了多个用于
一种轮式机器人定位方法和轮式机器人.pdf
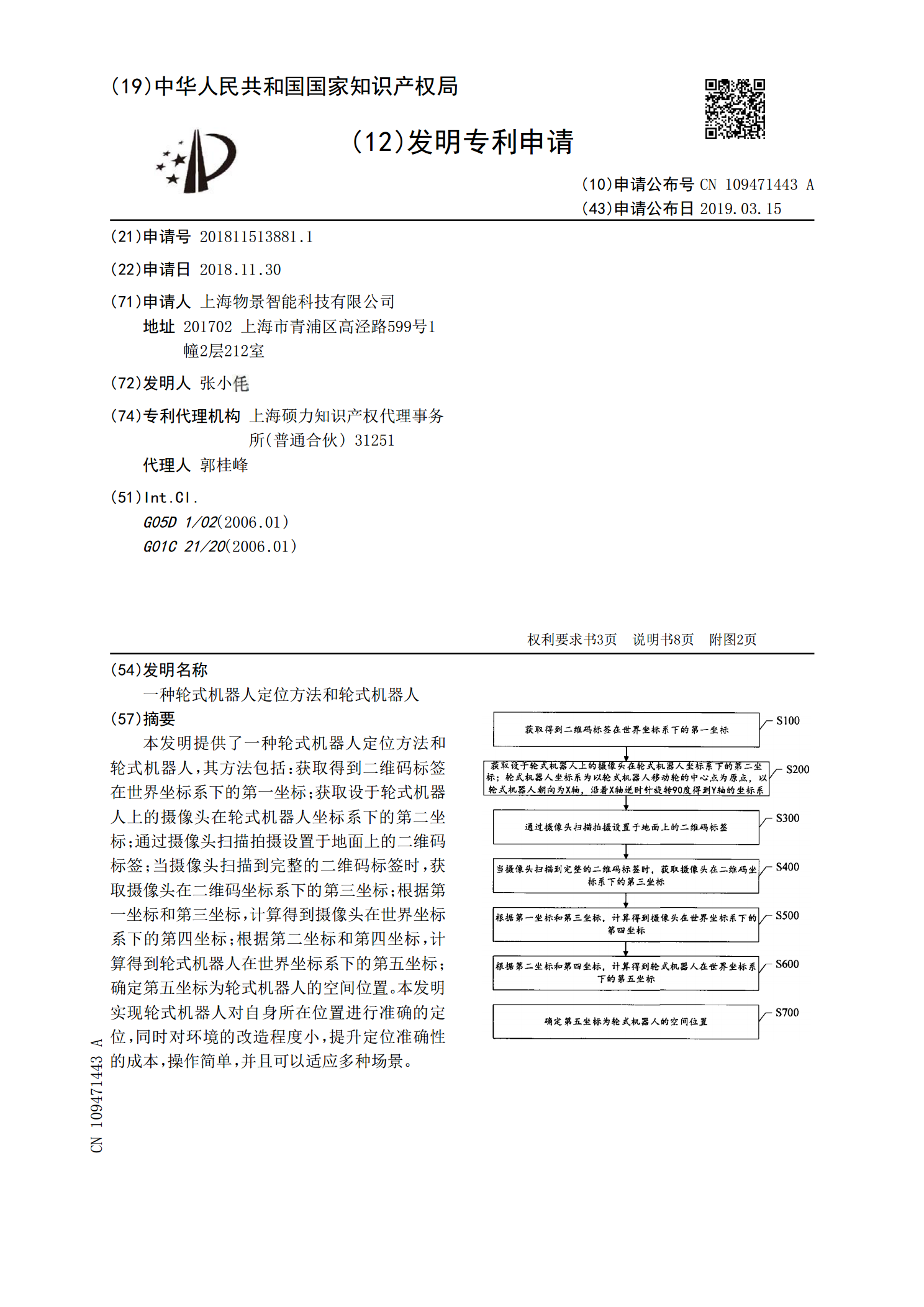
本发明提供了一种轮式机器人定位方法和轮式机器人,其方法包括:获取得到二维码标签在世界坐标系下的第一坐标;获取设于轮式机器人上的摄像头在轮式机器人坐标系下的第二坐标;通过摄像头扫描拍摄设置于地面上的二维码标签;当摄像头扫描到完整的二维码标签时,获取摄像头在二维码坐标系下的第三坐标;根据第一坐标和第三坐标,计算得到摄像头在世界坐标系下的第四坐标;根据第二坐标和第四坐标,计算得到轮式机器人在世界坐标系下的第五坐标;确定第五坐标为轮式机器人的空间位置。本发明实现轮式机器人对自身所在位置进行准确的定位,同时对环境的
一种轮式机器人.pdf
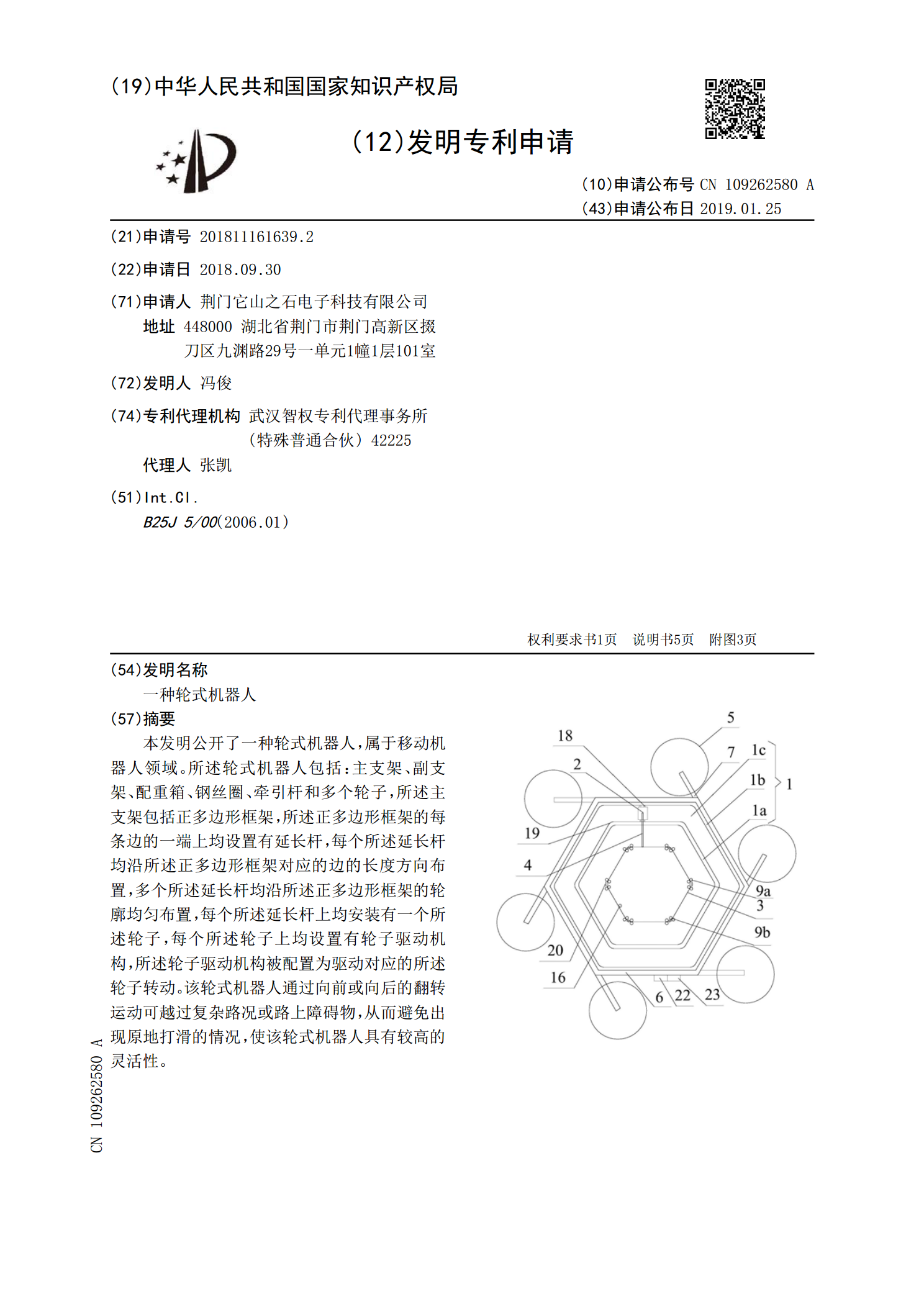
本发明公开了一种轮式机器人,属于移动机器人领域。所述轮式机器人包括:主支架、副支架、配重箱、钢丝圈、牵引杆和多个轮子,所述主支架包括正多边形框架,所述正多边形框架的每条边的一端上均设置有延长杆,每个所述延长杆均沿所述正多边形框架对应的边的长度方向布置,多个所述延长杆均沿所述正多边形框架的轮廓均匀布置,每个所述延长杆上均安装有一个所述轮子,每个所述轮子上均设置有轮子驱动机构,所述轮子驱动机构被配置为驱动对应的所述轮子转动。该轮式机器人通过向前或向后的翻转运动可越过复杂路况或路上障碍物,从而避免出现原地打滑的