
一种欠驱动二指抓取灵巧手及其工作方法.pdf

觅松****哥哥


1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种欠驱动二指抓取灵巧手及其工作方法.pdf
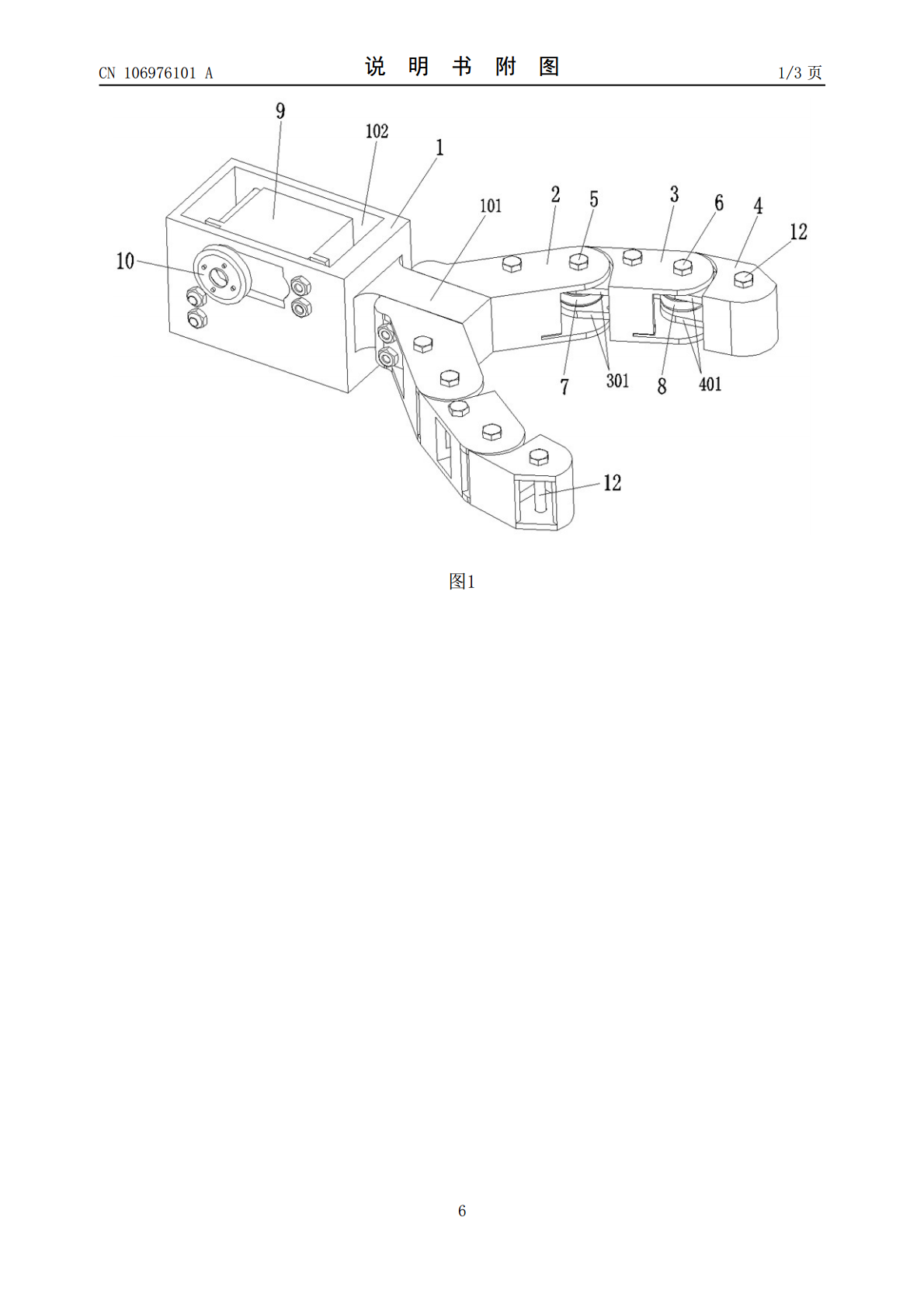
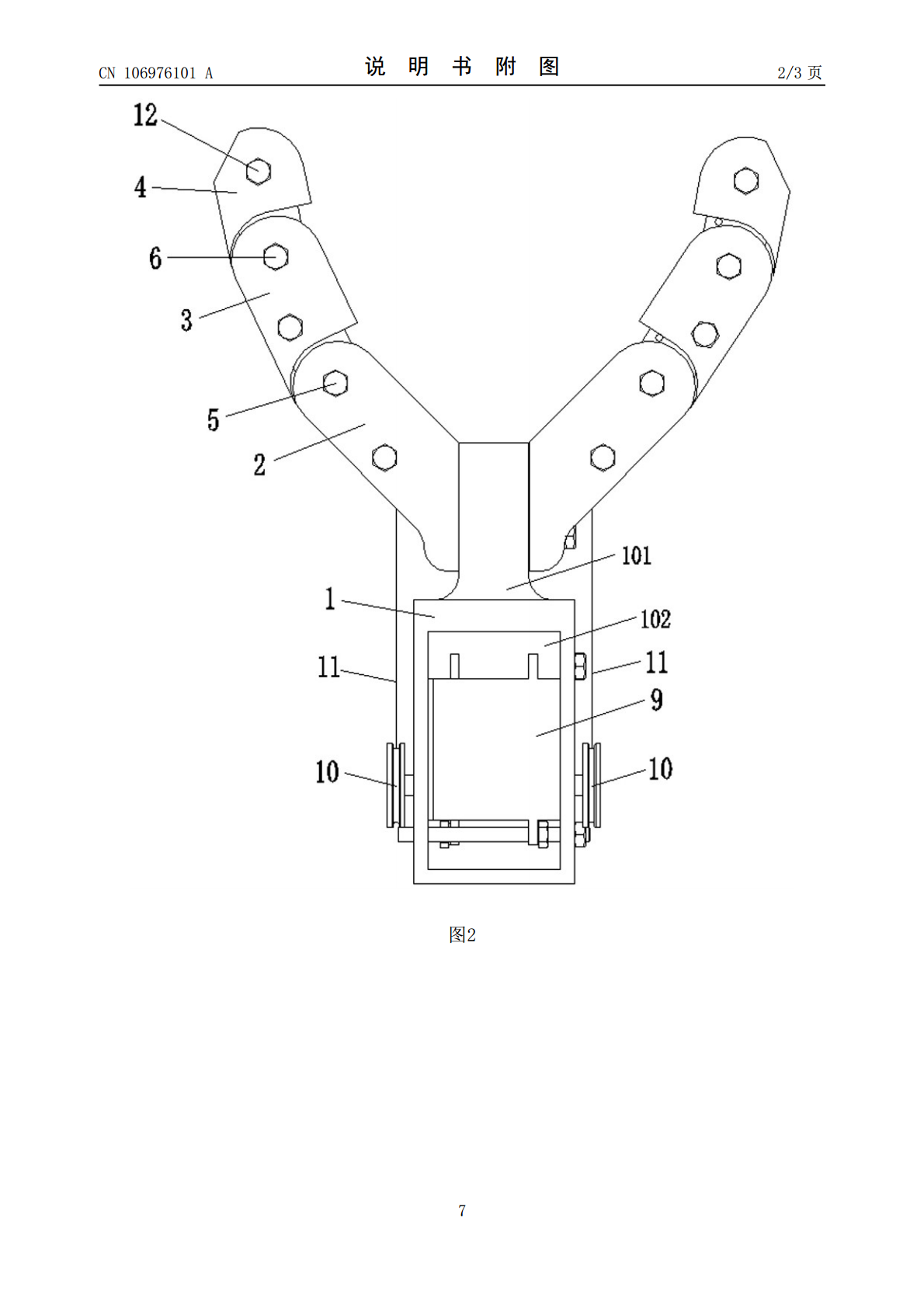
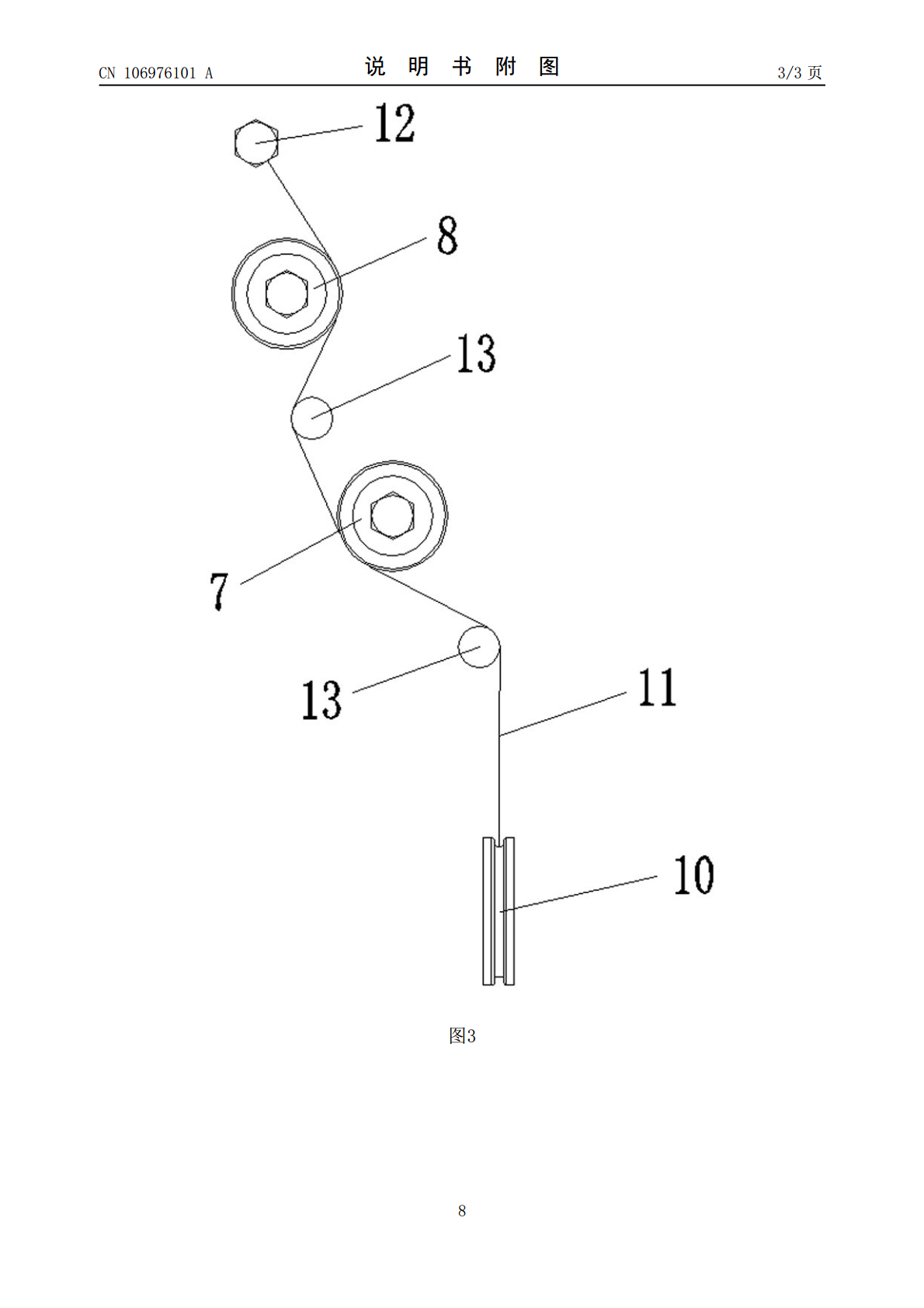
本发明涉及一种欠驱动二指抓取灵巧手及其工作方法,包括基座、两个夹持手指以及绳驱机构,夹持手指包括基指节、中指节以及端指节,基指节的一端固联在基座上,基指节的另一端经第一铰接轴与中指节铰接,中指节远离基指节端经第二铰接轴与端指节铰接,第一铰接轴和第二铰接轴的中部分别套设有第一滑轮和第二滑轮;绳驱机构包括两个安装在基座上的驱动电机,每个驱动电机的输出端固联有缠线轮,缠线轮上缠绕有驱动绳,驱动绳的伸出端依次缠绕过与其同侧的第一滑轮和第二滑轮并与端指节固联。本发明结构简单、设计合理,通过驱动电机的正反转来实现驱动
一种欠驱动多指灵巧手及其控制方法.pdf
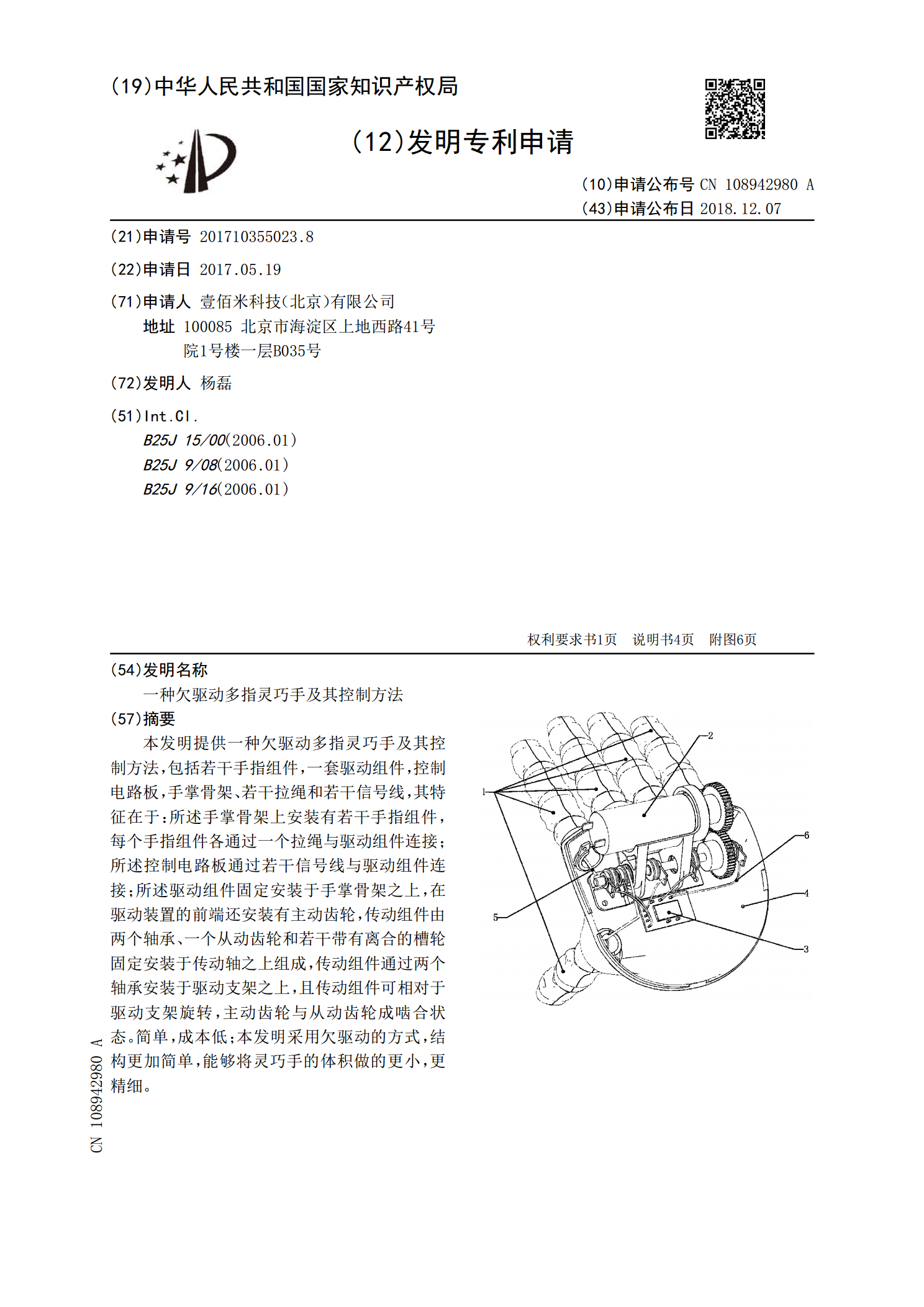
本发明提供一种欠驱动多指灵巧手及其控制方法,包括若干手指组件,一套驱动组件,控制电路板,手掌骨架、若干拉绳和若干信号线,其特征在于:所述手掌骨架上安装有若干手指组件,每个手指组件各通过一个拉绳与驱动组件连接;所述控制电路板通过若干信号线与驱动组件连接;所述驱动组件固定安装于手掌骨架之上,在驱动装置的前端还安装有主动齿轮,传动组件由两个轴承、一个从动齿轮和若干带有离合的槽轮固定安装于传动轴之上组成,传动组件通过两个轴承安装于驱动支架之上,且传动组件可相对于驱动支架旋转,主动齿轮与从动齿轮成啮合状态。简单,成

一种欠驱动灵巧手手指.pdf
本发明公开了一种欠驱动灵巧手手指,包括远指节、远端转动关节、中指节、中间转动关节、近指节、近端转动关节、基座、弹性回复绳和腱绳。集成在指节中的预紧调节块可以通过预紧螺母调节实现腱绳的后期多次预紧。后期使用过程中腱绳松弛时通过预紧螺母调节预紧调节块,不必拆装灵巧手使得腱绳再次预紧,避免因腱绳松弛而出现较大的运动传递误差,解决了腱绳传动型灵巧手长期使用过程中腱绳松弛的问题。采用预紧调节块的弧形通孔来代替固定式滑轮的整个圆周,进一步节省了手指内部空间,使得灵巧手手指的尺寸进一步缩小,并且通过使用弧形通孔来代替滑
一种欠驱动的仿人灵巧手.pdf
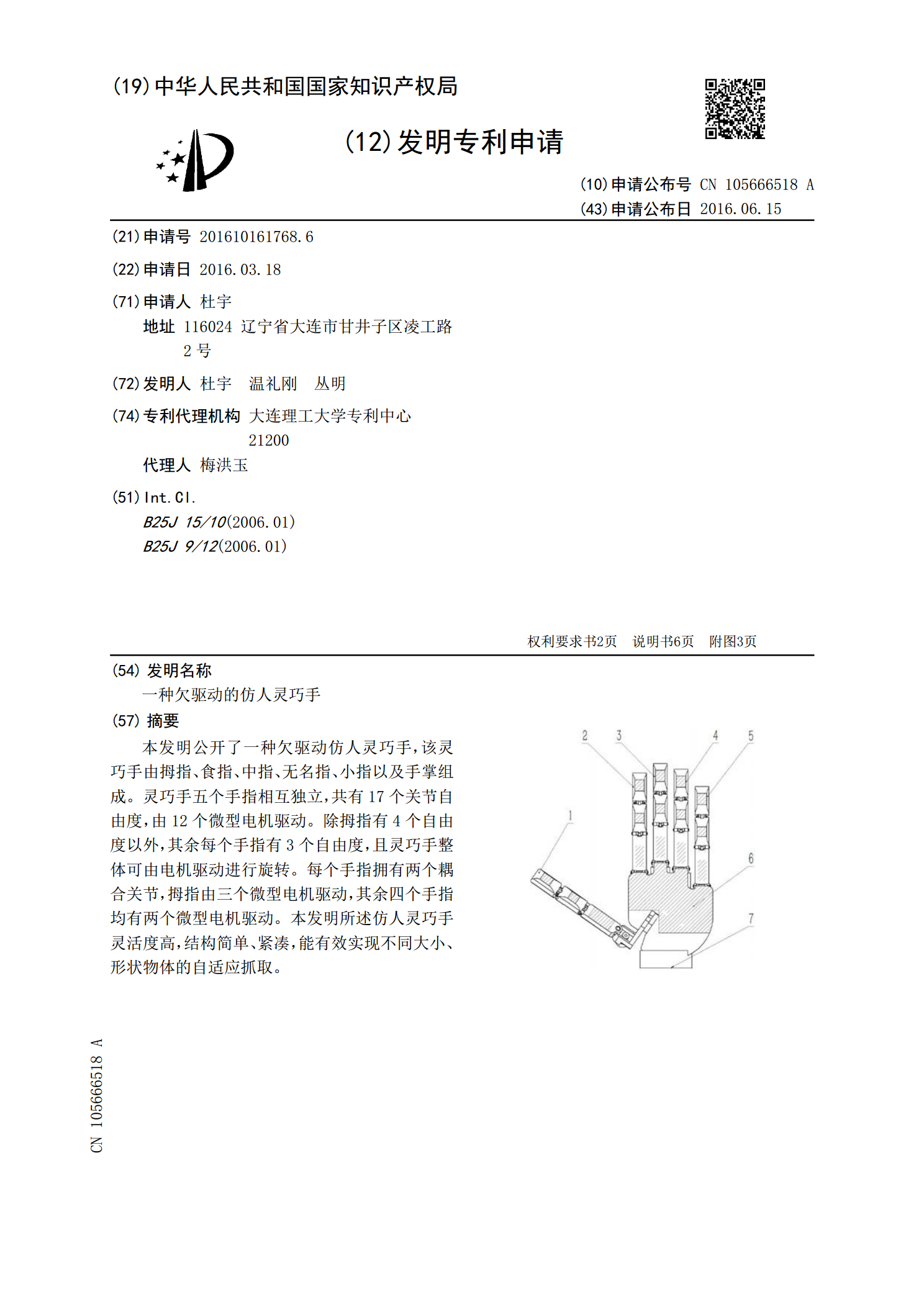
本发明公开了一种欠驱动仿人灵巧手,该灵巧手由拇指、食指、中指、无名指、小指以及手掌组成。灵巧手五个手指相互独立,共有17个关节自由度,由12个微型电机驱动。除拇指有4个自由度以外,其余每个手指有3个自由度,且灵巧手整体可由电机驱动进行旋转。每个手指拥有两个耦合关节,拇指由三个微型电机驱动,其余四个手指均有两个微型电机驱动。本发明所述仿人灵巧手灵活度高,结构简单、紧凑,能有效实现不同大小、形状物体的自适应抓取。
一种欠驱动仿人灵巧手装置.pdf
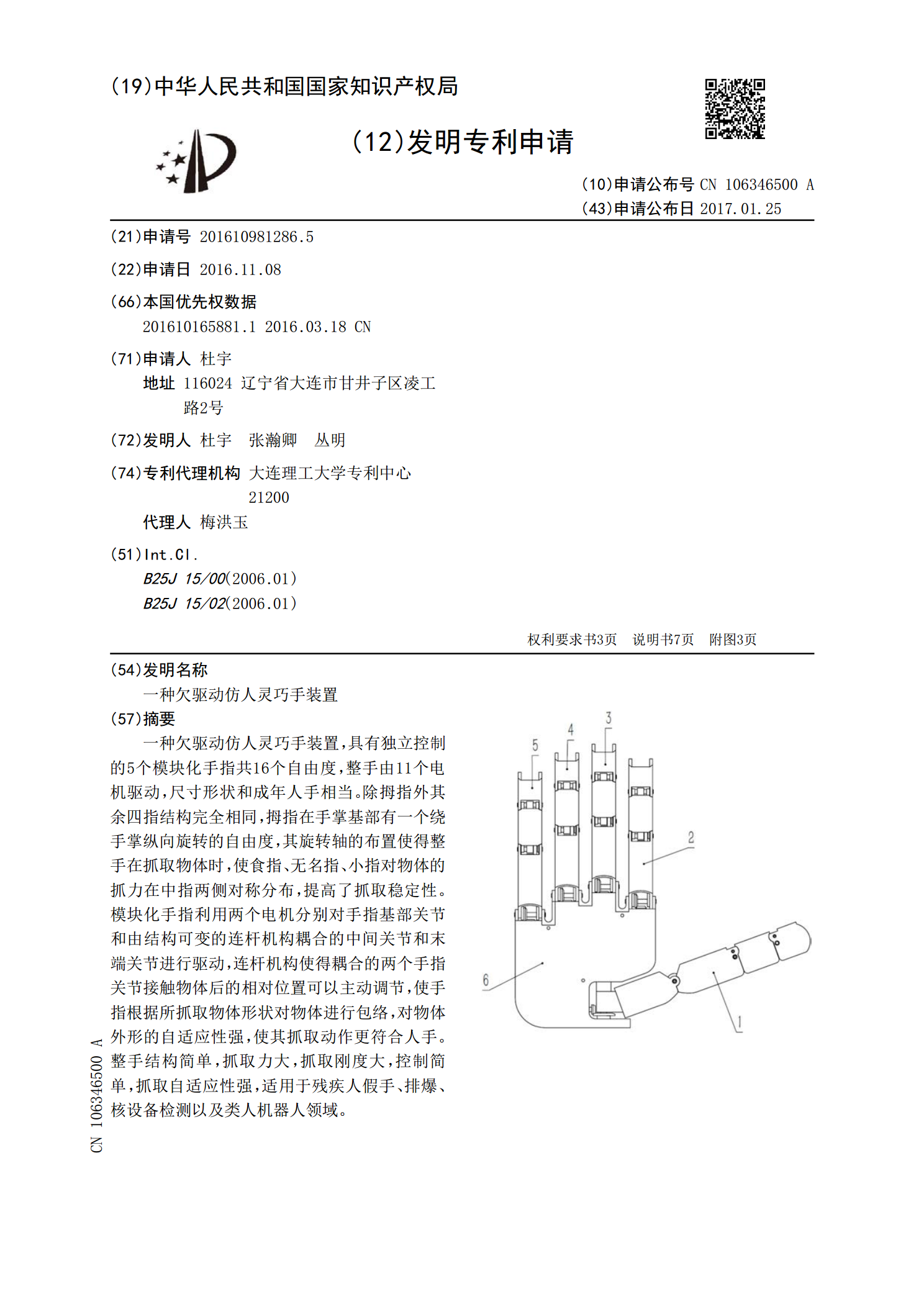
一种欠驱动仿人灵巧手装置,具有独立控制的5个模块化手指共16个自由度,整手由11个电机驱动,尺寸形状和成年人手相当。除拇指外其余四指结构完全相同,拇指在手掌基部有一个绕手掌纵向旋转的自由度,其旋转轴的布置使得整手在抓取物体时,使食指、无名指、小指对物体的抓力在中指两侧对称分布,提高了抓取稳定性。模块化手指利用两个电机分别对手指基部关节和由结构可变的连杆机构耦合的中间关节和末端关节进行驱动,连杆机构使得耦合的两个手指关节接触物体后的相对位置可以主动调节,使手指根据所抓取物体形状对物体进行包络,对物体外形的自