
一种通过智能手机采集脚型视频和传感器数据获取三维脚型的方法.pdf

一吃****福乾

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种通过智能手机采集脚型视频和传感器数据获取三维脚型的方法.pdf
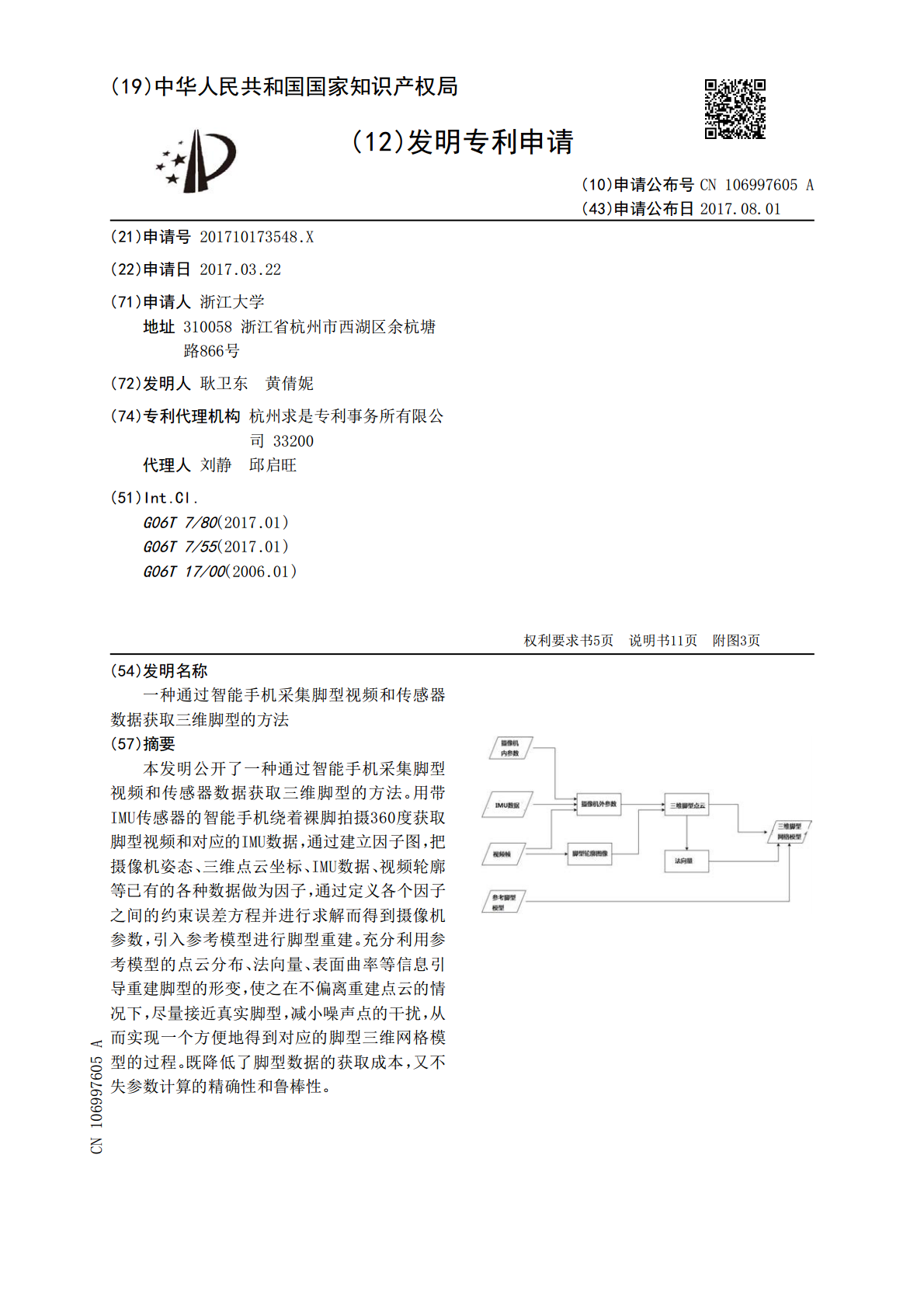
本发明公开了一种通过智能手机采集脚型视频和传感器数据获取三维脚型的方法。用带IMU传感器的智能手机绕着裸脚拍摄360度获取脚型视频和对应的IMU数据,通过建立因子图,把摄像机姿态、三维点云坐标、IMU数据、视频轮廓等已有的各种数据做为因子,通过定义各个因子之间的约束误差方程并进行求解而得到摄像机参数,引入参考模型进行脚型重建。充分利用参考模型的点云分布、法向量、表面曲率等信息引导重建脚型的形变,使之在不偏离重建点云的情况下,尽量接近真实脚型,减小噪声点的干扰,从而实现一个方便地得到对应的脚型三维网格模型的
一种基于图片的脚型数据获取方法.pdf
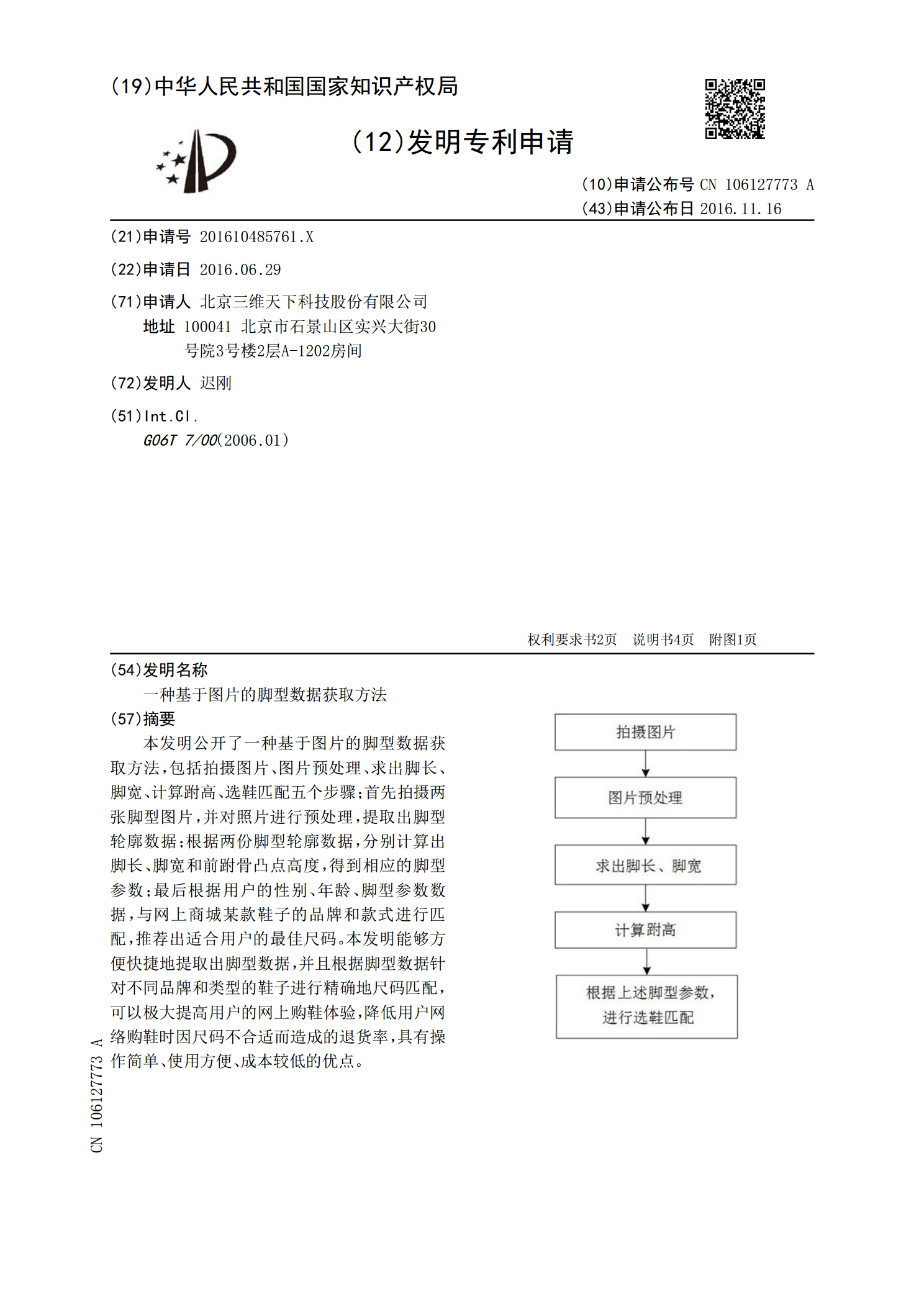
本发明公开了一种基于图片的脚型数据获取方法,包括拍摄图片、图片预处理、求出脚长、脚宽、计算跗高、选鞋匹配五个步骤;首先拍摄两张脚型图片,并对照片进行预处理,提取出脚型轮廓数据;根据两份脚型轮廓数据,分别计算出脚长、脚宽和前跗骨凸点高度,得到相应的脚型参数;最后根据用户的性别、年龄、脚型参数数据,与网上商城某款鞋子的品牌和款式进行匹配,推荐出适合用户的最佳尺码。本发明能够方便快捷地提取出脚型数据,并且根据脚型数据针对不同品牌和类型的鞋子进行精确地尺码匹配,可以极大提高用户的网上购鞋体验,降低用户网络购鞋时因

基于移动终端的三维脚型数据获取.docx
基于移动终端的三维脚型数据获取基于移动终端的三维脚型数据获取摘要:近年来,脚健康问题日益受到关注。脚型作为脚健康的重要指标之一,获取准确的脚型数据对于脚部疾病的诊断和治疗具有重要意义。本文提出了一种基于移动终端的三维脚型数据获取方法,通过利用移动终端内置的传感器和相机,实现了低成本、非接触的脚型数据采集。实验证明该方法能够高效、准确地获取三维脚型数据,为脚部疾病的诊断和治疗提供了有力的支持。关键词:脚型数据获取、移动终端、三维重建、脚部疾病1.引言脚健康问题是现代人健康不容忽视的一个方面。足弓无力、扁平足

基于移动终端的三维脚型数据获取的开题报告.docx
基于移动终端的三维脚型数据获取的开题报告一、选题背景随着人们对于健康的重视程度不断提高,越来越多的人开始关注运动和健身,其中很重要的一点就是脚部健康。而脚部健康的重要性在现代社会中更是日益凸显,因为随着城市化进程的不断推进和工作压力的不断增加,人们的生活方式也逐渐发生了改变。长时间的坐着,穿着不合脚型的鞋子以及缺乏运动等,都会给人们的脚部健康带来不良影响。因此,如何有效地保护和维护脚部健康,一直是人们关注的热点问题。而要保护脚部健康,首先就需要了解脚部的状态和形态,这对于鞋子的选择和设计也非常关键。而在现

一种基于格网模型和断面线的脚型参数获取方法.pdf
本发明公开了一种基于格网模型和断面线的脚型参数获取方法,包括步骤1:获取脚型的点云模型,再将点云构成相互连接的格网得到格网模型;步骤2:基于格网模型构建脚型的X‑Y‑Z局部坐标系;步骤3:在预设特征断面线上设置搜索窗口来获取待测参数相对应的特征点,再计算出待测参数;待测参数为脚长或脚宽时,计算待测参数的特征点之间的欧式距离;待测参数为跖围或跗围或兜围时,基于X‑Y‑Z局部坐标系将待测参数相对应的特征点所在平面作为切割平面,切割格网模型得到跖围断面线或跗围断面线或兜围断面线,再计算出跖围断面线或跗围断面线或