
一种基于多尺度特征的红外噪声抑制和细节增强方法.pdf

韶敏****ab

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多尺度特征的红外噪声抑制和细节增强方法.pdf
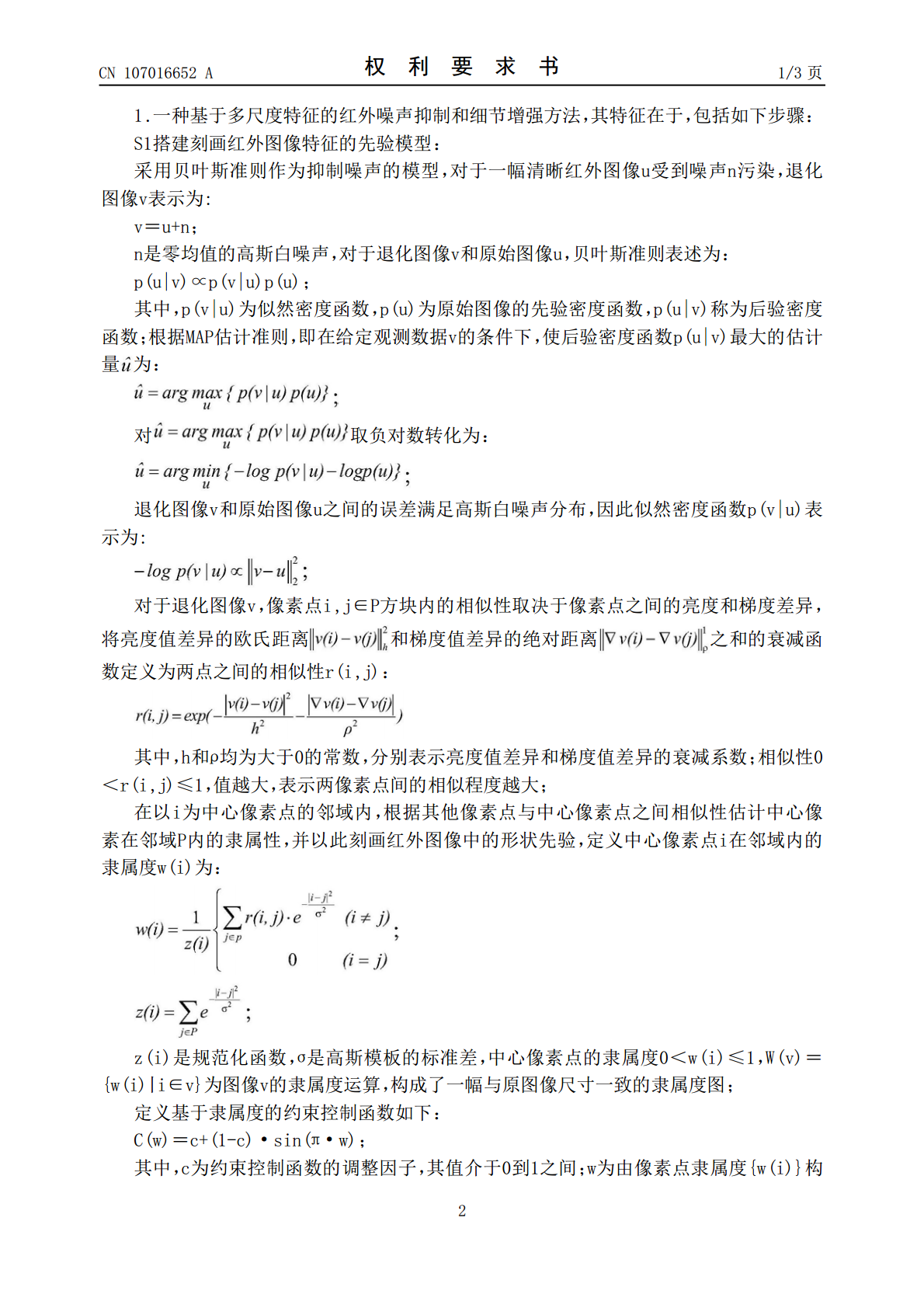
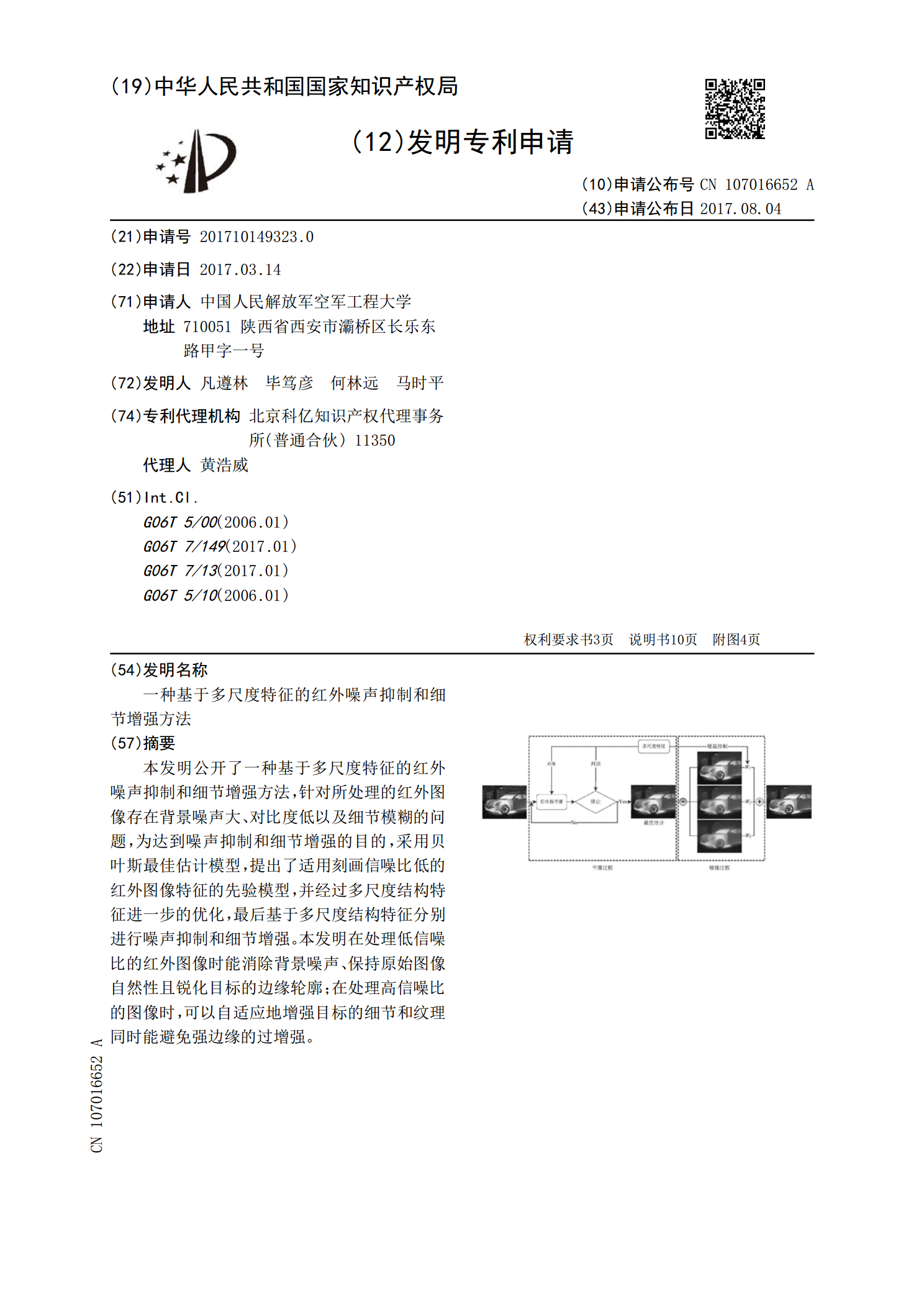
本发明公开了一种基于多尺度特征的红外噪声抑制和细节增强方法,针对所处理的红外图像存在背景噪声大、对比度低以及细节模糊的问题,为达到噪声抑制和细节增强的目的,采用贝叶斯最佳估计模型,提出了适用刻画信噪比低的红外图像特征的先验模型,并经过多尺度结构特征进一步的优化,最后基于多尺度结构特征分别进行噪声抑制和细节增强。本发明在处理低信噪比的红外图像时能消除背景噪声、保持原始图像自然性且锐化目标的边缘轮廓;在处理高信噪比的图像时,可以自适应地增强目标的细节和纹理同时能避免强边缘的过增强。

一种红外图像细节增强及噪声抑制方法.pdf
本发明公开了一种红外图像细节增强及噪声抑制方法,使用更大范围内的权重值对图像进行处理,有效的消除红外图像中的高斯噪声,并且保留一定的图像细节,对比于原本的均值滤波图像有效的提高了图像的质量。对原始图像通过使用拉普拉斯变换,得到图像较多的细节信息,经过对图像进行融合可以得到一副具有多图像细节低噪声的图像。本发明的思路简单,计算复杂度不高,且效果良好。

一种增强细节的红外图像噪声抑制方法.pdf
本发明公开了一种增强细节的红外图像噪声抑制方法,通过使用噪声分类对不同区域内的图像使用不同的降噪方法,有效的消除了所选区域内的主要噪声,并通过Sobel算子有效的保留了红外图像的细节信息以及图像的边缘信息通过拉普拉斯金字塔融合算法将两幅图像融合,获得相比传统方法具有大量图像细节和更低噪声的图像。本发明的思路简单,复杂度较低,计算量适中,且效果良好。

一种基于多尺度融合模块和特征增强的杂草检测方法.pdf
一种基于多尺度融合模块和特征增强的杂草检测方法,对预处理的作物杂草的数据进行训练并评估SSD网络模型,针对SSD网络模型参数大,小目标检测效果差,作物与杂草检测精度低的问题进行改进,将轻量网络MobileNet作为SSD模型的特征提取网络,并设计了多尺度融合模块,将浅层特征图先通过通道注意力机制增强图像中的关键信息,再将特征图经过不同膨胀率大小的扩张卷积扩大感受野,最后将两条分支进行特征融合,让用于检测小目标的浅层特征图在包含较多小目标细节信息的同时,还可以包含丰富的语义信息;在此基础上对输出的特征图经过

基于多尺度分解的红外图像细节增强算法研究的开题报告.docx
基于多尺度分解的红外图像细节增强算法研究的开题报告一、研究背景红外图像因其不受光照干扰、透视效应小、对在视线以外的物体也有探测能力等优点,在军事、安防、医疗等领域得到了广泛应用。然而,由于其图像质量较差、细节信息含量不足等问题,红外图像的识别、检测等算法的性能受到了很大限制。因此,如何提高红外图像的细节信息等问题一直是研究者关注的焦点。二、研究内容本文主要研究基于多尺度分解的红外图像细节增强算法。具体来说,本文将使用小波变换对红外图像进行多尺度分解,分解得到的不同尺度的图像将分别进行细节增强处理。最后,将