
一种叶轮加工刀具路径整体优化方法.pdf

新槐****公主


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种叶轮加工刀具路径整体优化方法.pdf
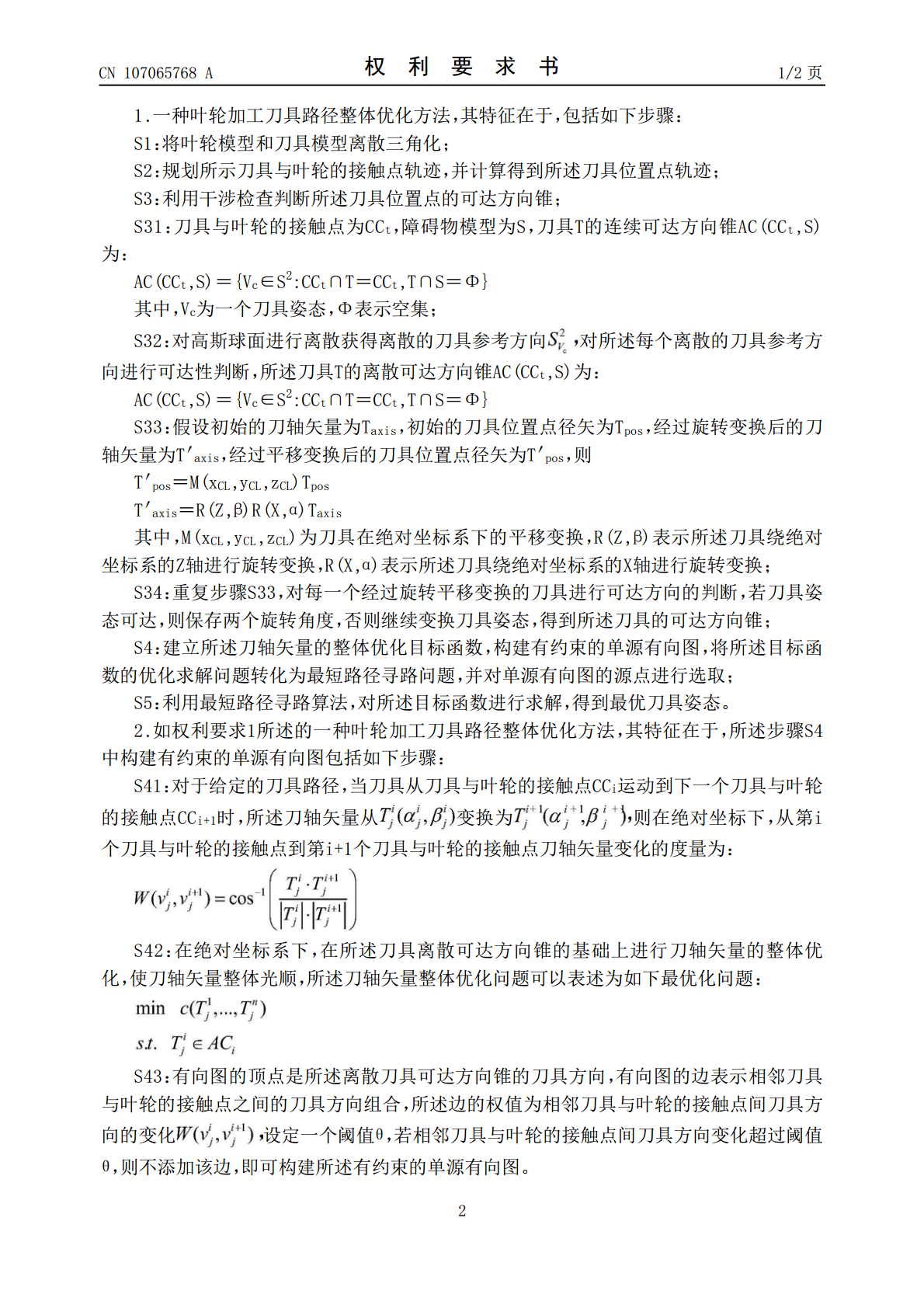
本发明公开了一种叶轮加工刀具路径整体优化方法,包括如下步骤:S1:将叶轮模型和刀具模型离散三角化;S2:规划所示刀具与叶轮的接触点轨迹,并计算得到所述刀具位置点轨迹;S3:利用干涉检查判断所述刀具位置点的可达方向锥;S4:建立所述刀轴矢量的整体优化目标函数,构建有约束的单源有向图,将所述目标函数的优化求解问题转化为最短路径寻路问题;S5:利用最短路径寻路算法,对所述目标函数进行求解,得到最优刀具姿态。本发明的方法,可快速的计算刀具可达方向锥,并实现刀轴矢量的整体光顺。

整体叶轮轮毂曲面数控加工刀具轨迹规划方法.docx
整体叶轮轮毂曲面数控加工刀具轨迹规划方法引言随着现代加工技术的快速发展和数字化技术的兴起,数控加工已经成为了现代制造中必不可少的一环。在整体叶轮轮毂曲面数控加工领域中,规划刀具轨迹成为了非常重要的一环。如何高效地规划刀具轨迹,成为了制造业中的难题之一。本文将介绍整体叶轮轮毂曲面数控加工刀具轨迹规划的方法。背景整体叶轮轮毂曲面数控加工,需要在叶轮轮毂表面上切割出复杂的几何形状,因此需要对加工过程中的各个因素进行精确的控制和计算,以保证加工质量和效率。其中,刀具轨迹规划是整个加工过程中非常重要的环节,它直接影

一种整体叶轮开槽插铣加工优化方法.pdf
本发明公开了一种整体叶轮开槽插铣加工优化方法,其建立插铣动力学模型和大圆角插铣刀非对称插铣的铣削力模型,将通过模态试验获得的模态参数和由铣削力模型得到的动态铣削力代入到动力学方程中从而进一步对切削力进行修正;建立等效刀杆稳定性分析有限元模型,引入变形比和刀杆危险位置径向偏移量,从而获取优化的切削参数。所述方法解决了整体叶轮开槽插铣加工中切削参数的选择优化问题,从而避免了加工过程中刀具和工件产生干涉现象,达到了叶片变形小、切削效率高的有益效果。本发明也适用于类似零件的开槽插铣粗加工。

整体叶轮叶片五轴精加工刀具路径规划算法及试验研究.docx
整体叶轮叶片五轴精加工刀具路径规划算法及试验研究整体叶轮叶片五轴精加工刀具路径规划算法及试验研究摘要:随着制造业的发展,对于叶轮叶片的精加工要求越来越高。在五轴数控机床上进行叶轮叶片的整体加工,需要设计一种高效准确的刀具路径规划算法。本文基于叶轮叶片的特点,提出了一种优化的五轴刀具路径规划算法,并进行了试验研究。关键词:叶轮叶片;五轴刀具路径规划;精加工一、引言叶轮叶片是航空、航天、汽车等领域中重要的零部件之一。在传统的机械加工过程中,由于叶轮叶片的复杂形状和内部曲线,往往需要多次工艺来完成加工。而在五轴
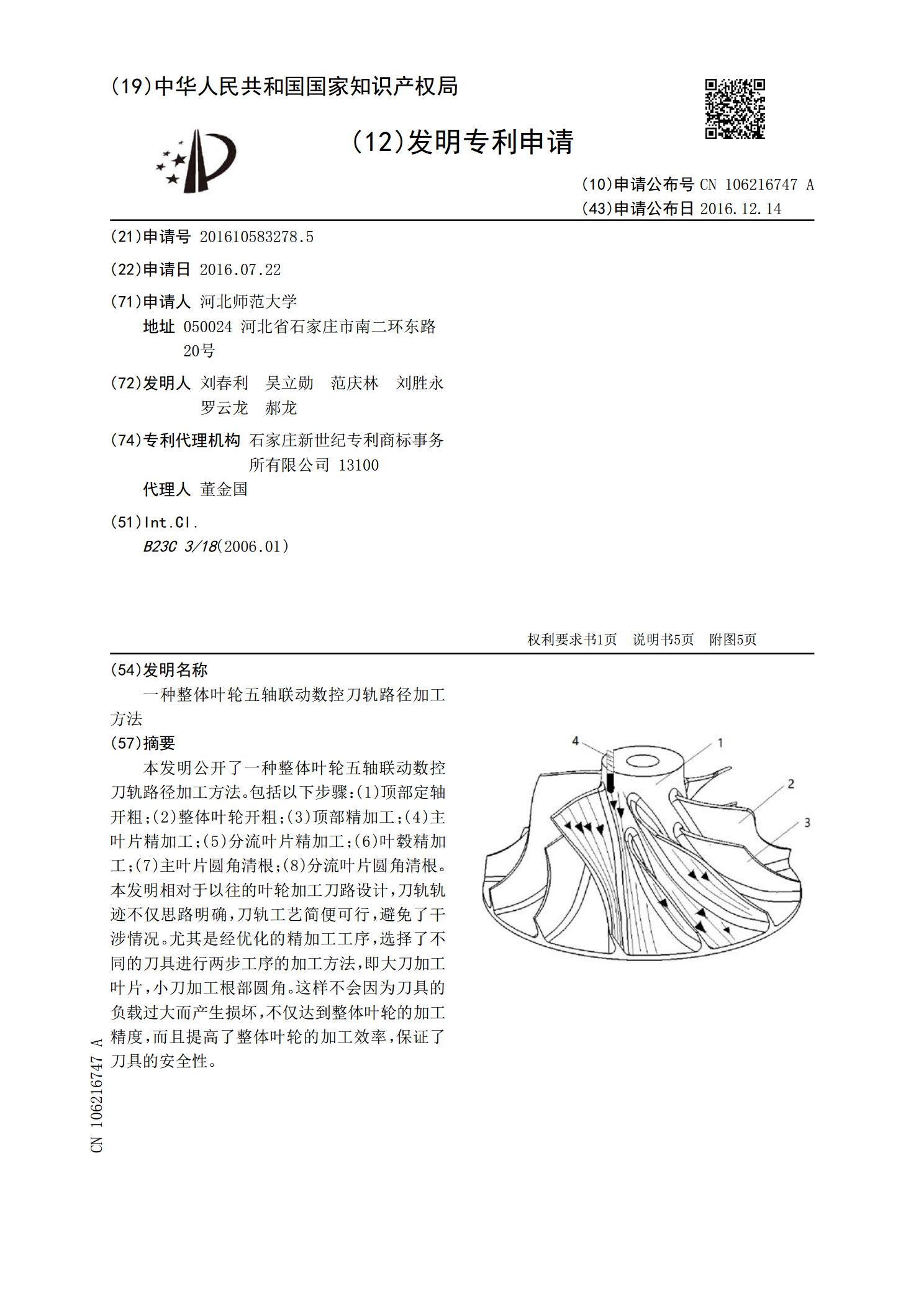
一种整体叶轮五轴联动数控刀轨路径加工方法.pdf
本发明公开了一种整体叶轮五轴联动数控刀轨路径加工方法。包括以下步骤:(1)顶部定轴开粗;(2)整体叶轮开粗;(3)顶部精加工;(4)主叶片精加工;(5)分流叶片精加工;(6)叶毂精加工;(7)主叶片圆角清根;(8)分流叶片圆角清根。本发明相对于以往的叶轮加工刀路设计,刀轨轨迹不仅思路明确,刀轨工艺简便可行,避免了干涉情况。尤其是经优化的精加工工序,选择了不同的刀具进行两步工序的加工方法,即大刀加工叶片,小刀加工根部圆角。这样不会因为刀具的负载过大而产生损坏,不仅达到整体叶轮的加工精度,而且提高了整体叶轮的