
基于建筑物基底矢量的遥感影像屋顶轮廓提取方法.pdf

莉娜****ua

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于建筑物基底矢量的遥感影像屋顶轮廓提取方法.pdf
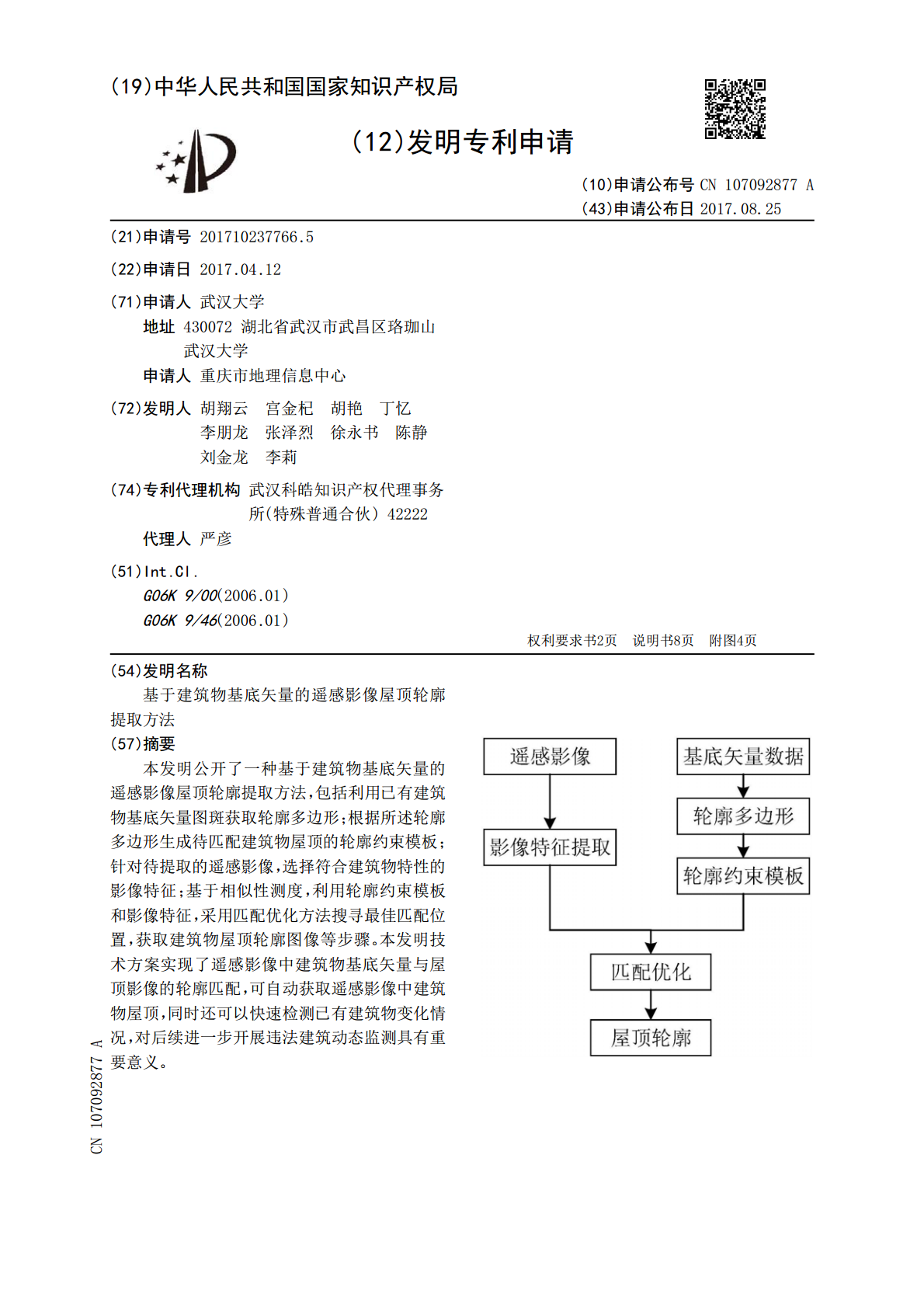
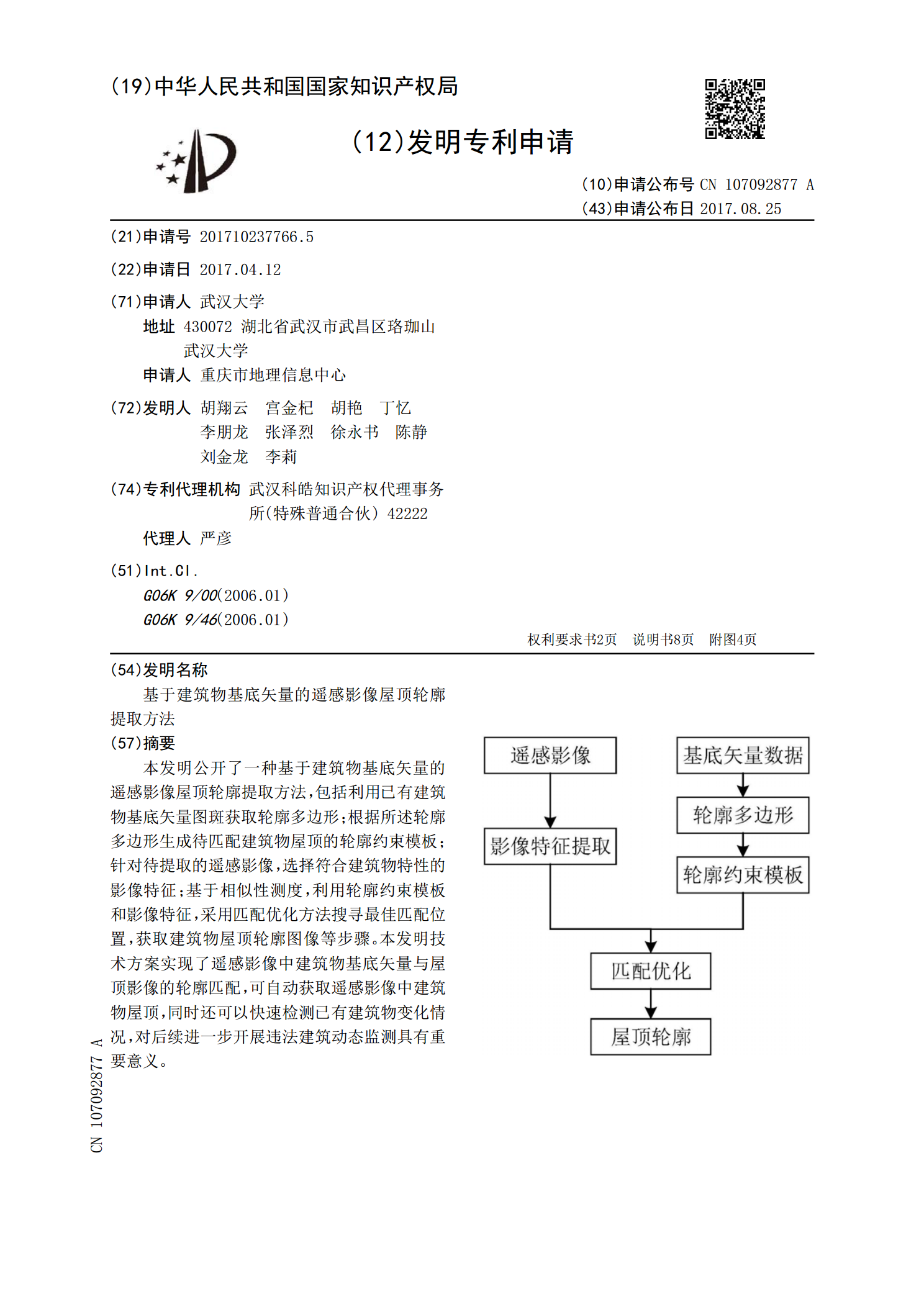
本发明公开了一种基于建筑物基底矢量的遥感影像屋顶轮廓提取方法,包括利用已有建筑物基底矢量图斑获取轮廓多边形;根据所述轮廓多边形生成待匹配建筑物屋顶的轮廓约束模板;针对待提取的遥感影像,选择符合建筑物特性的影像特征;基于相似性测度,利用轮廓约束模板和影像特征,采用匹配优化方法搜寻最佳匹配位置,获取建筑物屋顶轮廓图像等步骤。本发明技术方案实现了遥感影像中建筑物基底矢量与屋顶影像的轮廓匹配,可自动获取遥感影像中建筑物屋顶,同时还可以快速检测已有建筑物变化情况,对后续进一步开展违法建筑动态监测具有重要意义。

基于高分辨率遥感影像的建筑物提取及轮廓矢量化研究的任务书.docx
基于高分辨率遥感影像的建筑物提取及轮廓矢量化研究的任务书任务书题目:基于高分辨率遥感影像的建筑物提取及轮廓矢量化研究1.任务背景随着遥感技术的不断发展,高分辨率遥感影像已经成为建筑物提取及轮廓矢量化研究的重要数据来源。然而,由于建筑物形态的复杂性和复杂的背景干扰,如何高效准确地提取建筑物轮廓仍然是一个挑战。2.任务目标本任务旨在研究基于高分辨率遥感影像的建筑物提取及轮廓矢量化方法,包括以下目标:(1)提取高分辨率遥感影像中的建筑物信息;(2)对提取的建筑物轮廓进行自适应平滑处理,进一步提高轮廓的精度;(3

一种从卫星遥感影像中提取建筑物轮廓的方法.pdf
本发明提供了一种从卫星遥感影像中提取建筑物轮廓的方法,包括:对同一区域的全色波段和多光谱波段影像进行融合,生成多光谱融合影像;对融合影像进行对比度增强处理;对融合影像进行影像分割,创建影像对象;对影像对象进行基于光谱特征的监督分类,获得不透水性地类分布图;针对不透水性地类分布图,利用模糊逻辑分类器,结合光谱属性、空间属性、纹理属性和上下文属性的特征构建知识规则,并按知识规则进行分类,提取出建筑物屋顶类。本发明能够针对不规整或复杂的城区场景实现建筑物轮廓提取,无需辅助数据,在分类中不必对屋顶类之外的其他不透

基于深度学习的遥感影像建筑物提取方法研究.docx
基于深度学习的遥感影像建筑物提取方法研究摘要深度学习技术在遥感影像利用中扮演着重要的角色,尤其是在建筑物提取领域。本文对基于深度学习的遥感影像建筑物提取方法进行了研究。首先,介绍了遥感影像建筑物提取的背景和现状。然后,详细讨论了深度学习算法在遥感影像中的应用,包括卷积神经网络和遥感影像语义分割方法。接下来,提出了一种基于深度学习的遥感影像建筑物提取方法,并进行了实验验证。最后,总结了研究成果,并展望了未来的研究方向。1.引言遥感影像建筑物提取是遥感图像处理中一个重要的任务。准确地提取出遥感影像中的建筑物信

基于深度学习的遥感影像建筑物提取方法及设备.pdf
本发明提供了一种基于深度学习的遥感影像建筑物提取方法及设备,该方法包括:提取遥感影像的图像特征,根据得到的图像特征生成建筑物实例检测框;根据所述检测框构建建筑物实例的初始轮廓;根据所述初始轮廓和所述初始轮廓在遥感影像中对应的图像特征生成建筑物多边形;基于所述建筑物多边形提取所述遥感影像中的目标建筑物实例。本发明能够有效地结合建筑物的初始轮廓和图像特征精确地描绘建筑物实例的几何形状,自动实现建筑物实例准确提取。