
一种薄膜张力测量装置及方法.pdf

Ja****44

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种薄膜张力测量装置及方法.pdf
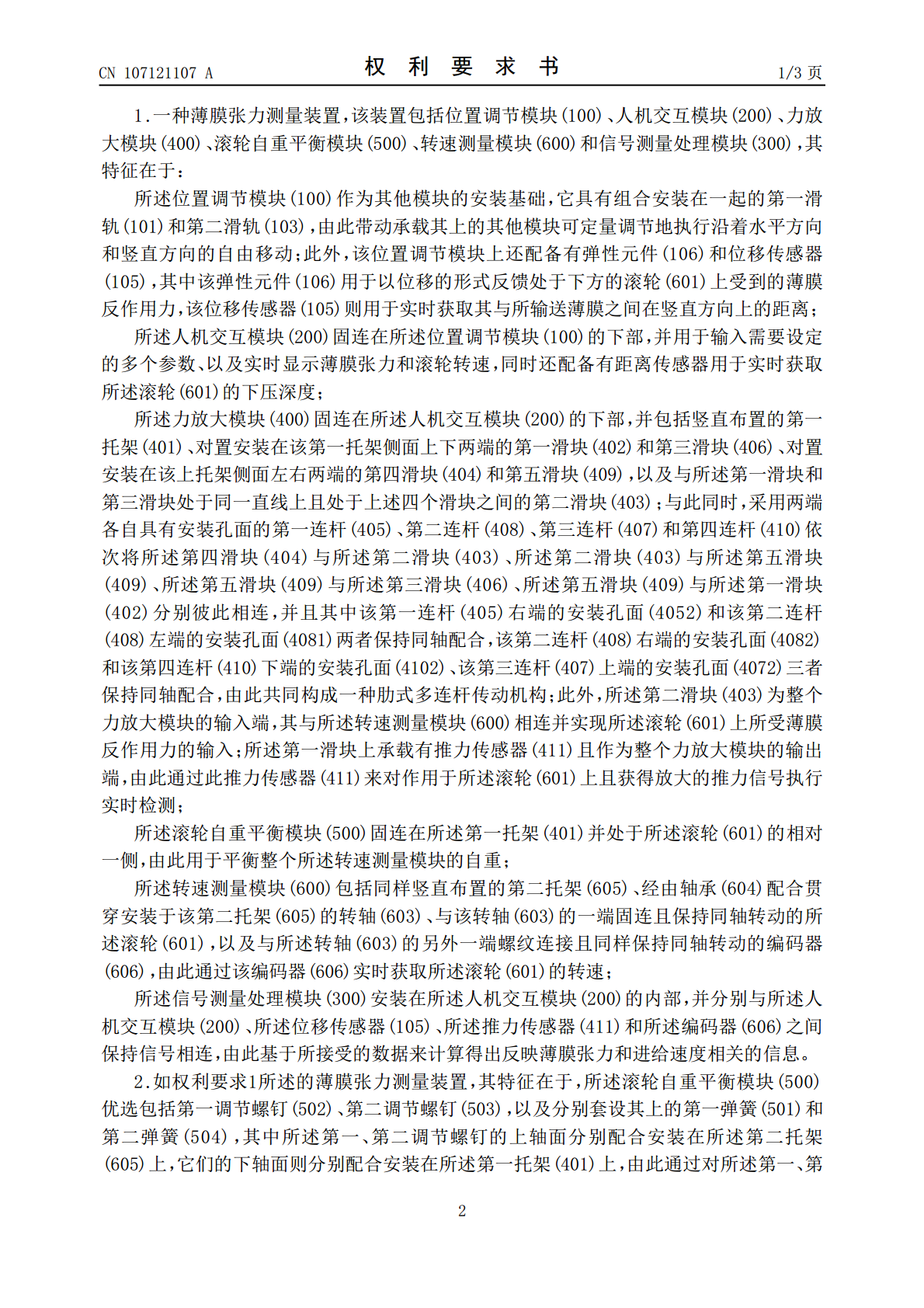
本发明属于张力检测技术领域,并公开了一种薄膜张力测量装置,包括位置调节模块、力放大模块、滚轮自重平衡模块、转速测量模块、人机交互模块与信号测量处理模块,其中位置调节模块实现滚轮下压位置与下压量调节,力放大模块用于放大滚轮受到的推力并传递给推力传感器,滚轮自重平衡模块用于平衡整个转速测量模块的自重,转速检测模块用于实现薄膜进给速度的检测,人机交互模块用于实现设定参数的输入,信号测量处理模块则用于将检测到的滚轮上的推力换算为薄膜张力。本发明还公开了相应的测量方法。通过本发明,可实现整体装置的模块化和紧凑化,灵
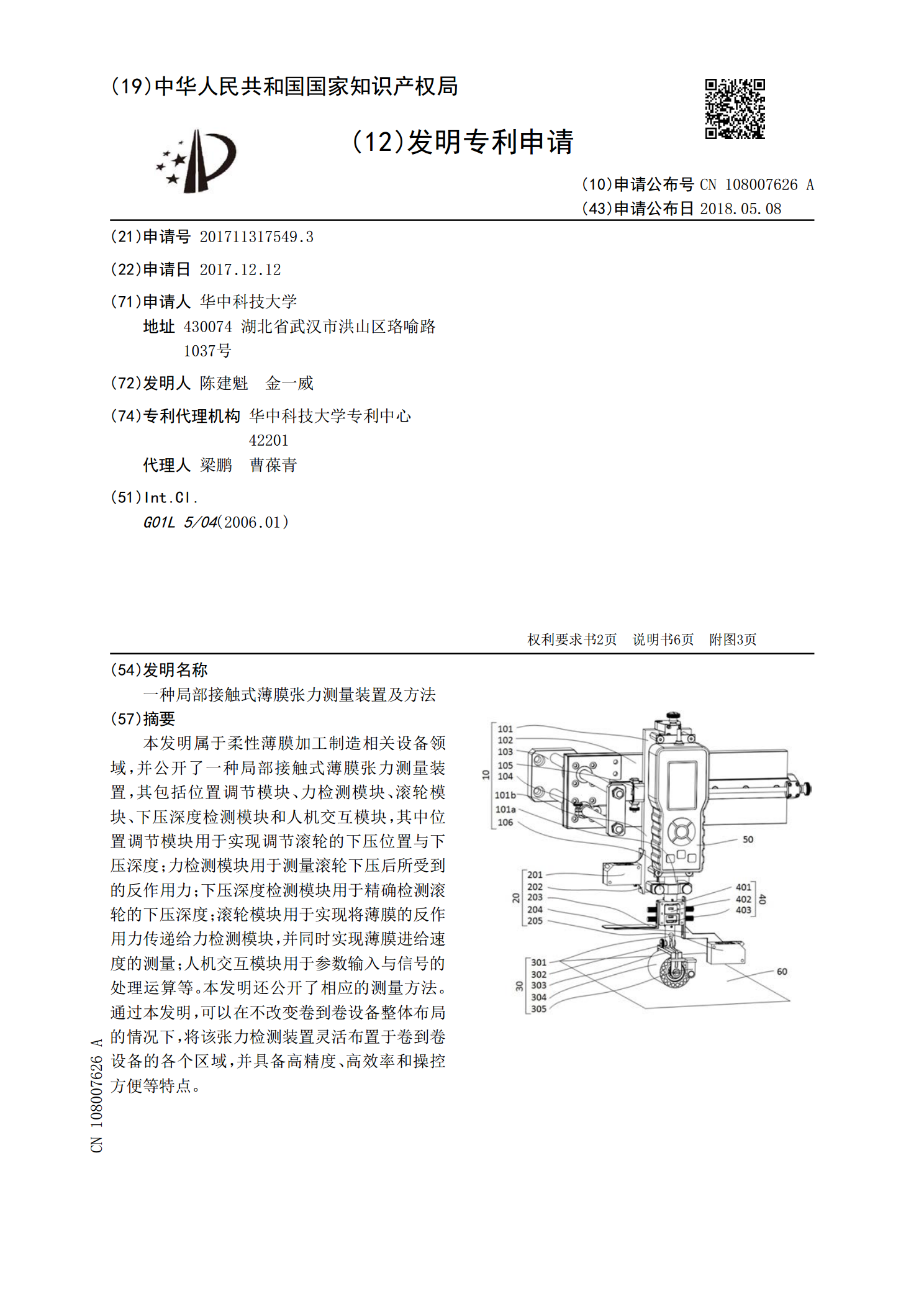
一种局部接触式薄膜张力测量装置及方法.pdf
本发明属于柔性薄膜加工制造相关设备领域,并公开了一种局部接触式薄膜张力测量装置,其包括位置调节模块、力检测模块、滚轮模块、下压深度检测模块和人机交互模块,其中位置调节模块用于实现调节滚轮的下压位置与下压深度;力检测模块用于测量滚轮下压后所受到的反作用力;下压深度检测模块用于精确检测滚轮的下压深度;滚轮模块用于实现将薄膜的反作用力传递给力检测模块,并同时实现薄膜进给速度的测量;人机交互模块用于参数输入与信号的处理运算等。本发明还公开了相应的测量方法。通过本发明,可以在不改变卷到卷设备整体布局的情况下,将该张

一种缆索张力实时测量装置及方法.pdf
本发明公开了一种缆索张力实时测量装置及方法,固定架的一侧通过轴承固定牵引轮,牵引轮的一侧的固定架上设有一个纵杆,纵杆的顶端通过铰接固定测力板,测力板的中下部和测力轮固定,测力板的左端上侧固定定位轮,测力板的左端下侧连接测力传感器的一端,测力传感器的另一端连接固定架,缆索依次绕设在牵引轮、测力轮、定位轮上,定位轮和测力板在测力轮的带动下同时绕纵杆的顶端转动;牵引轮、测力轮、定位轮在空间位置上处于同一垂直面,牵引轮的水平高度高于测力轮的水平高度,测力轮的水平高度与定位轮的水平高度一致,结构简单,操作方便,误差
缆绳张力测量装置、收放设备及张力测量方法.pdf
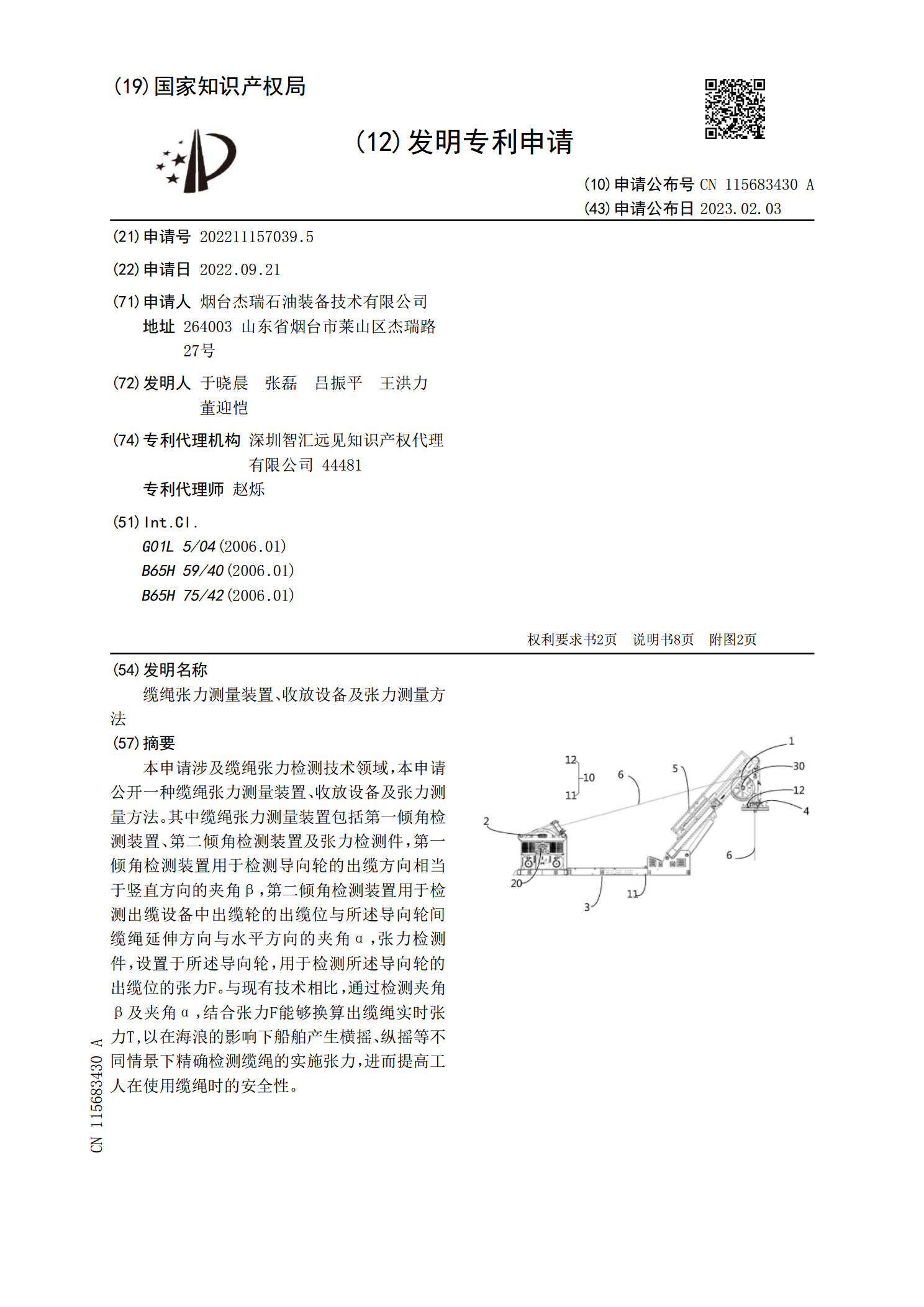
本申请涉及缆绳张力检测技术领域,本申请公开一种缆绳张力测量装置、收放设备及张力测量方法。其中缆绳张力测量装置包括第一倾角检测装置、第二倾角检测装置及张力检测件,第一倾角检测装置用于检测导向轮的出缆方向相当于竖直方向的夹角β,第二倾角检测装置用于检测出缆设备中出缆轮的出缆位与所述导向轮间缆绳延伸方向与水平方向的夹角α,张力检测件,设置于所述导向轮,用于检测所述导向轮的出缆位的张力F。与现有技术相比,通过检测夹角β及夹角α,结合张力F能够换算出缆绳实时张力T,以在海浪的影响下船舶产生横摇、纵摇等不同情景下精确
一种丝线张力测量装置.pdf
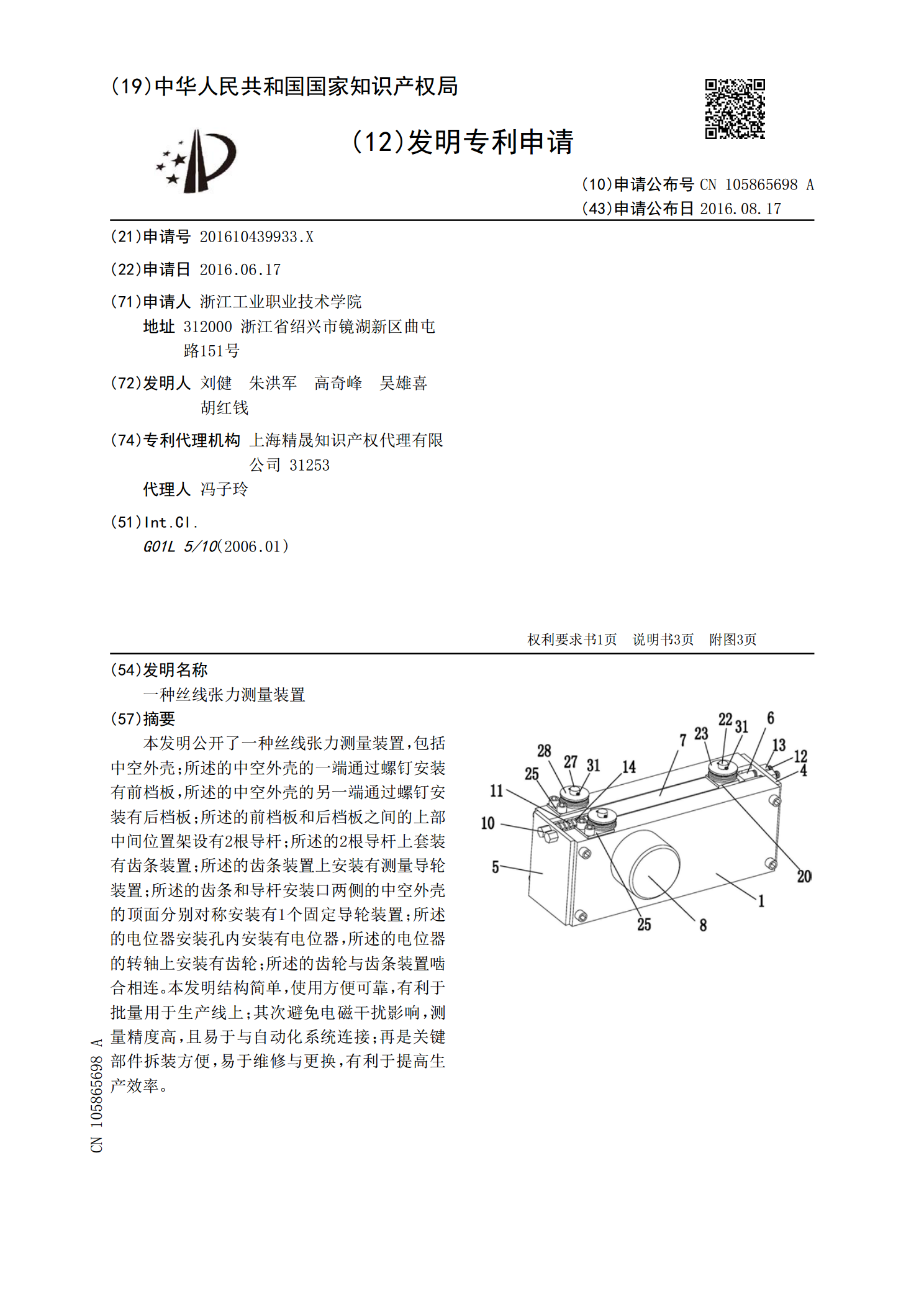
本发明公开了一种丝线张力测量装置,包括中空外壳;所述的中空外壳的一端通过螺钉安装有前档板,所述的中空外壳的另一端通过螺钉安装有后档板;所述的前档板和后档板之间的上部中间位置架设有2根导杆;所述的2根导杆上套装有齿条装置;所述的齿条装置上安装有测量导轮装置;所述的齿条和导杆安装口两侧的中空外壳的顶面分别对称安装有1个固定导轮装置;所述的电位器安装孔内安装有电位器,所述的电位器的转轴上安装有齿轮;所述的齿轮与齿条装置啮合相连。本发明结构简单,使用方便可靠,有利于批量用于生产线上;其次避免电磁干扰影响,测量精度