
转向操纵控制装置.pdf

一吃****海逸


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转向操纵控制装置、转向操纵控制方法、转向操纵控制程序.pdf
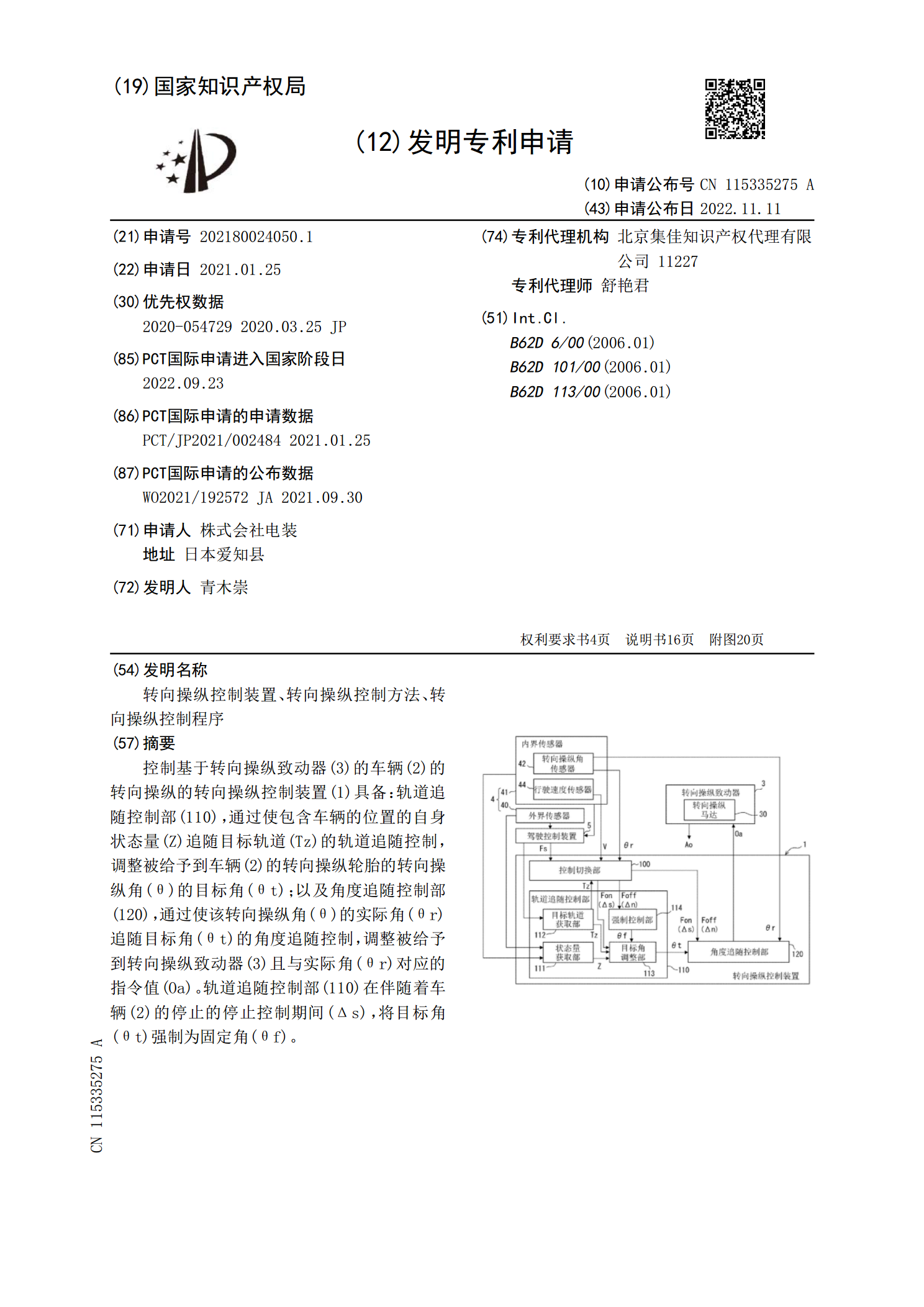
控制基于转向操纵致动器(3)的车辆(2)的转向操纵的转向操纵控制装置(1)具备:轨道追随控制部(110),通过使包含车辆的位置的自身状态量(Z)追随目标轨道(Tz)的轨道追随控制,调整被给予到车辆(2)的转向操纵轮胎的转向操纵角(θ)的目标角(θt);以及角度追随控制部(120),通过使该转向操纵角(θ)的实际角(θr)追随目标角(θt)的角度追随控制,调整被给予到转向操纵致动器(3)且与实际角(θr)对应的指令值(Oa)。轨道追随控制部(110)在伴随着车辆(2)的停止的停止控制期间(Δs),将目标角(

转向操纵控制装置.pdf
本发明提供一种能够将路面状态作为转向操纵反作用力更适当地传递给驾驶员的转向操纵控制装置。理想车辆模型对基于目标小齿轮角的第一弹性反作用力转矩、以及至少基于横向加速度的第二弹性反作用力转矩进行运算作为转向操纵辅助力的弹性成分的成分。理想车辆模型通过以规定的使用比率将第一以及第二弹性反作用力转矩相加来运算弹性成分。理想车辆模型基于根据第一以及第二弹性反作用力转矩的差值所设定的分配增益来决定第一以及第二弹性反作用力转矩的使用比率。第一以及第二弹性反作用力转矩的差值越增大,理想车辆模型越使第二弹性反作用力转矩的使
操纵转向控制装置.pdf
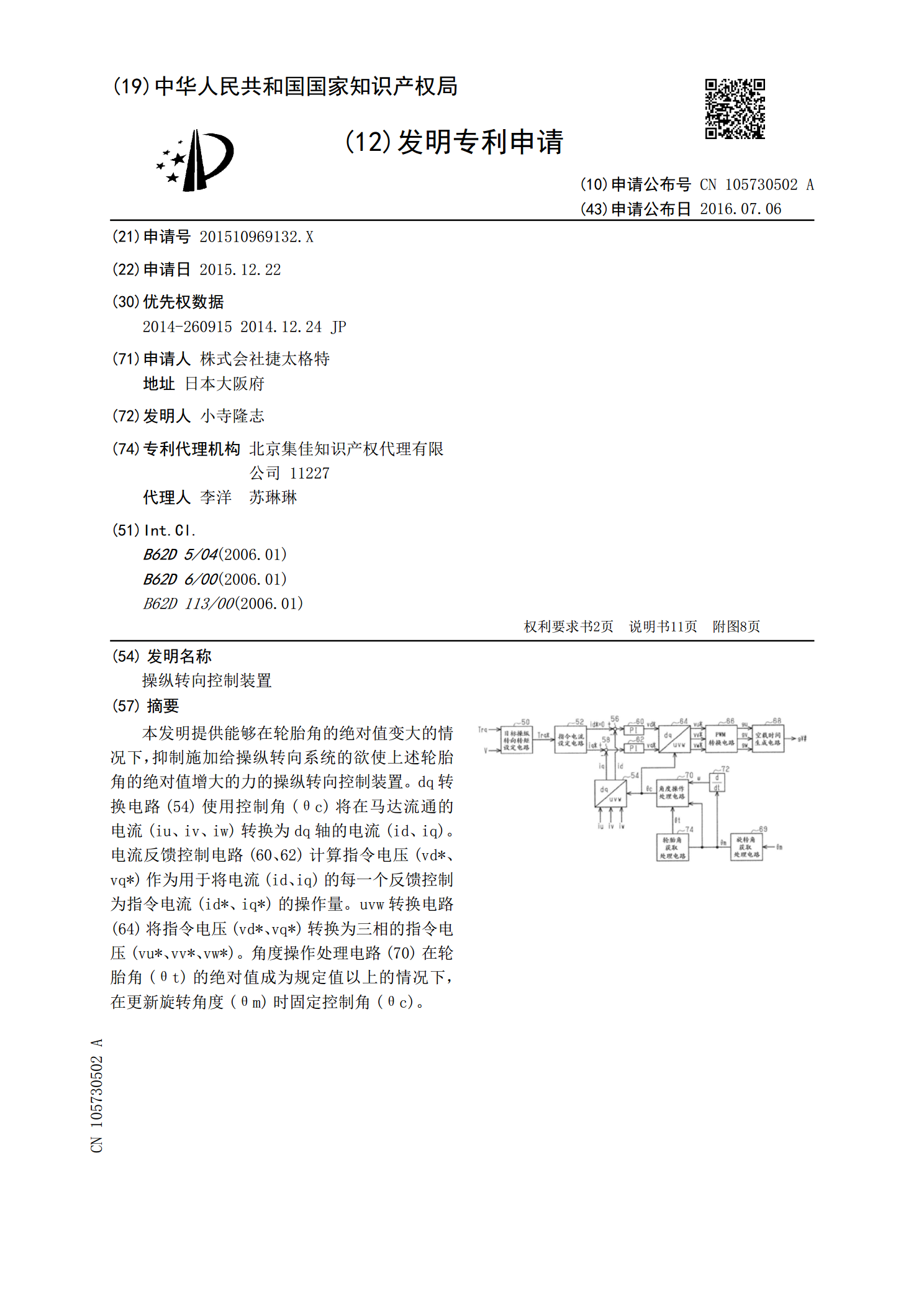
本发明提供能够在轮胎角的绝对值变大的情况下,抑制施加给操纵转向系统的欲使上述轮胎角的绝对值增大的力的操纵转向控制装置。dq转换电路(54)使用控制角(θc)将在马达流通的电流(iu、iv、iw)转换为dq轴的电流(id、iq)。电流反馈控制电路(60、62)计算指令电压(vd*、vq*)作为用于将电流(id、iq)的每一个反馈控制为指令电流(id*、iq*)的操作量。uvw转换电路(64)将指令电压(vd*、vq*)转换为三相的指令电压(vu*、vv*、vw*)。角度操作处理电路(70)在轮胎角(θt)的
转向操纵控制装置.pdf
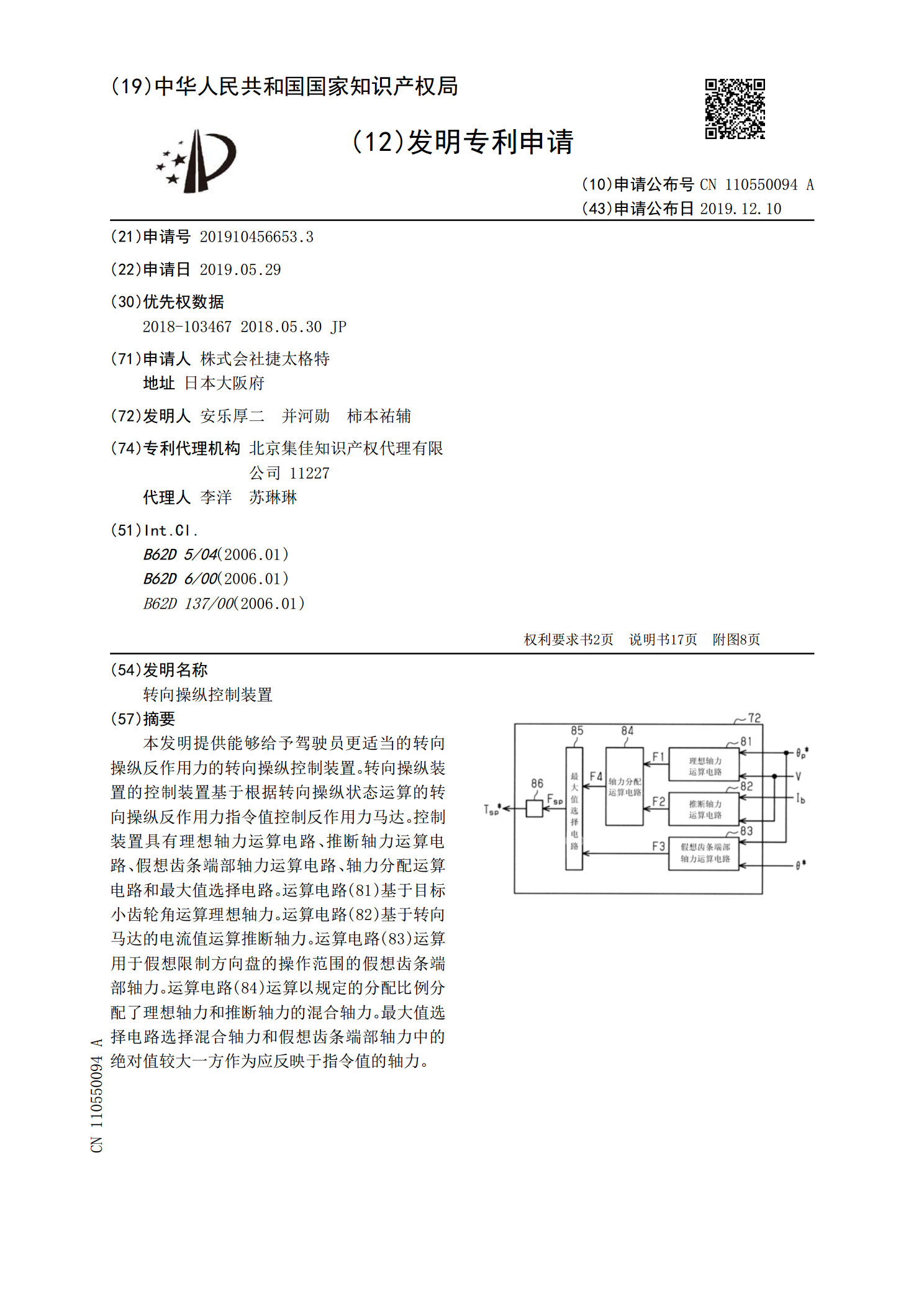
本发明提供能够给予驾驶员更适当的转向操纵反作用力的转向操纵控制装置。转向操纵装置的控制装置基于根据转向操纵状态运算的转向操纵反作用力指令值控制反作用力马达。控制装置具有理想轴力运算电路、推断轴力运算电路、假想齿条端部轴力运算电路、轴力分配运算电路和最大值选择电路。运算电路(81)基于目标小齿轮角运算理想轴力。运算电路(82)基于转向马达的电流值运算推断轴力。运算电路(83)运算用于假想限制方向盘的操作范围的假想齿条端部轴力。运算电路(84)运算以规定的分配比例分配了理想轴力和推断轴力的混合轴力。最大值选择
转向操纵控制装置.pdf
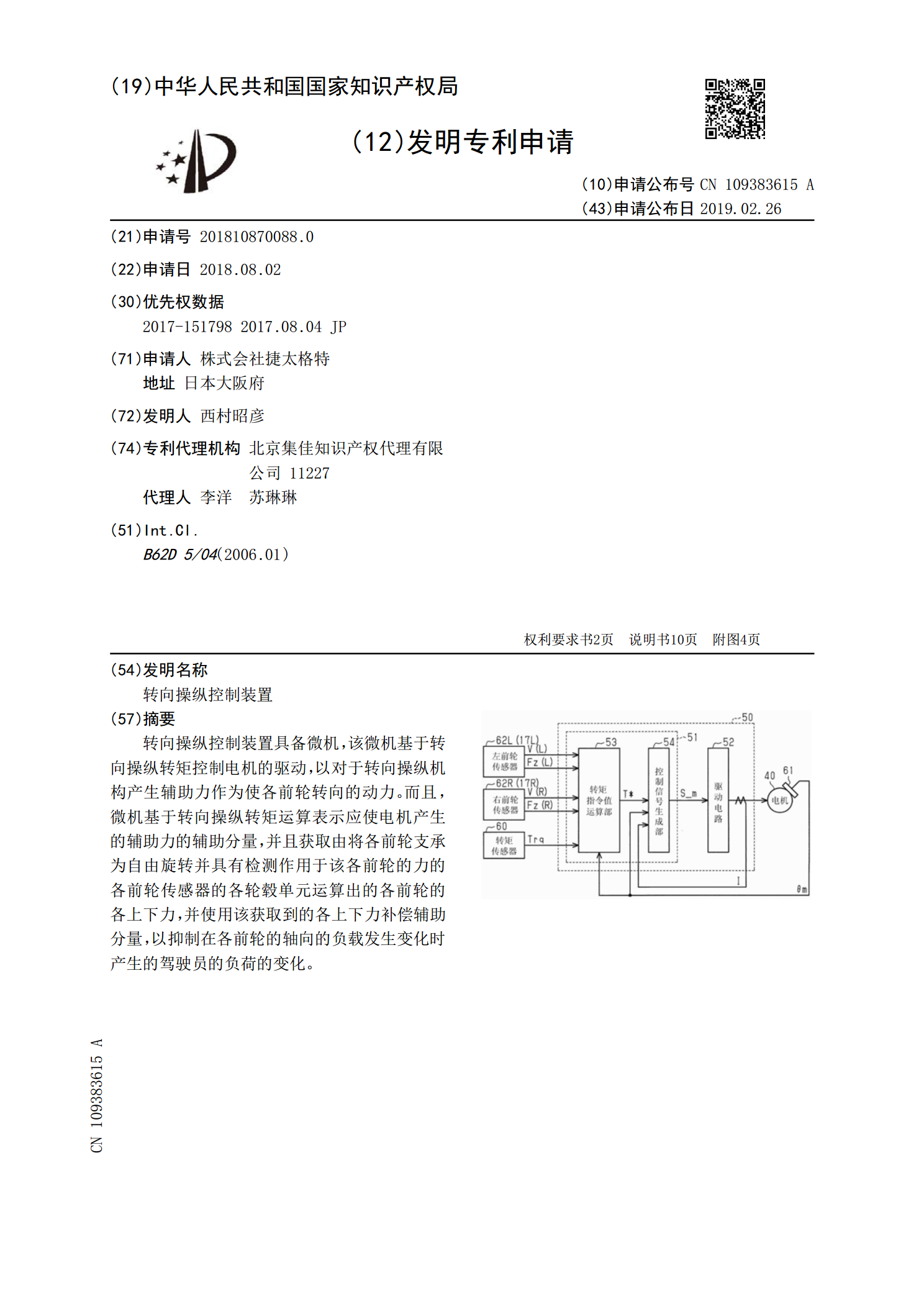
转向操纵控制装置具备微机,该微机基于转向操纵转矩控制电机的驱动,以对于转向操纵机构产生辅助力作为使各前轮转向的动力。而且,微机基于转向操纵转矩运算表示应使电机产生的辅助力的辅助分量,并且获取由将各前轮支承为自由旋转并具有检测作用于该各前轮的力的各前轮传感器的各轮毂单元运算出的各前轮的各上下力,并使用该获取到的各上下力补偿辅助分量,以抑制在各前轮的轴向的负载发生变化时产生的驾驶员的负荷的变化。