
一种迁徙式自动纠偏单桩抱桩器施工机构以及施工方法.pdf

含平****ng


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种迁徙式自动纠偏单桩抱桩器施工机构以及施工方法.pdf
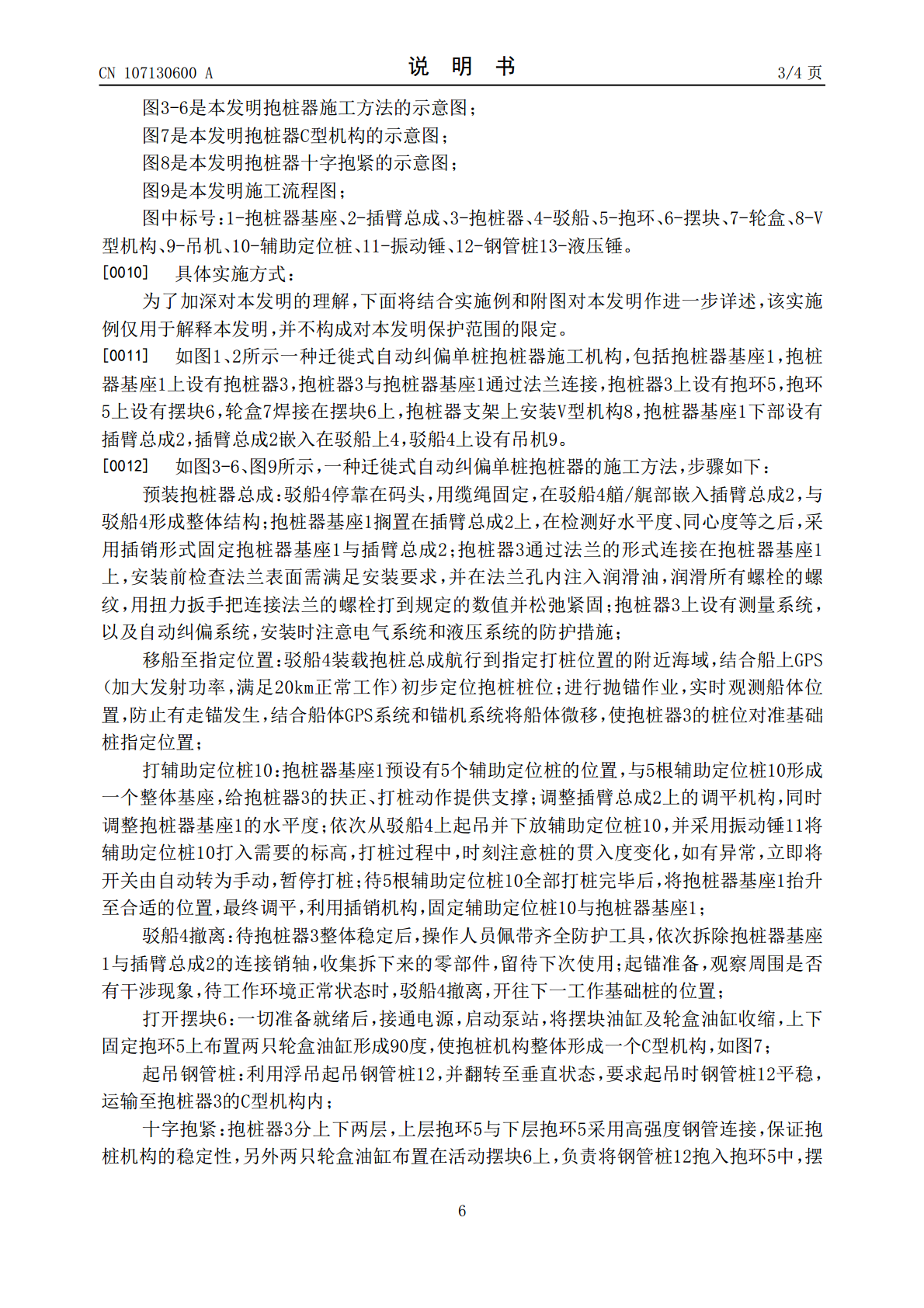
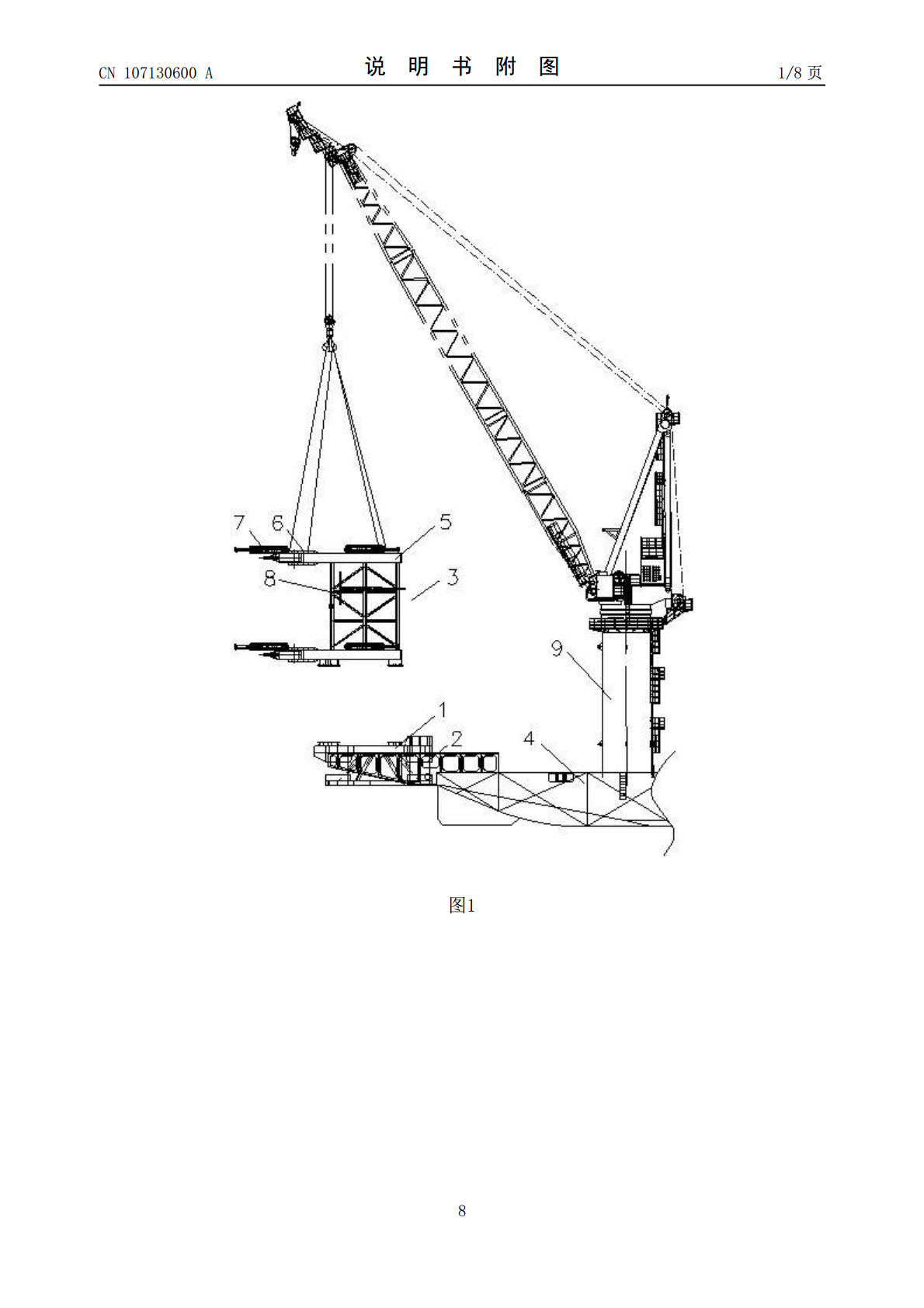
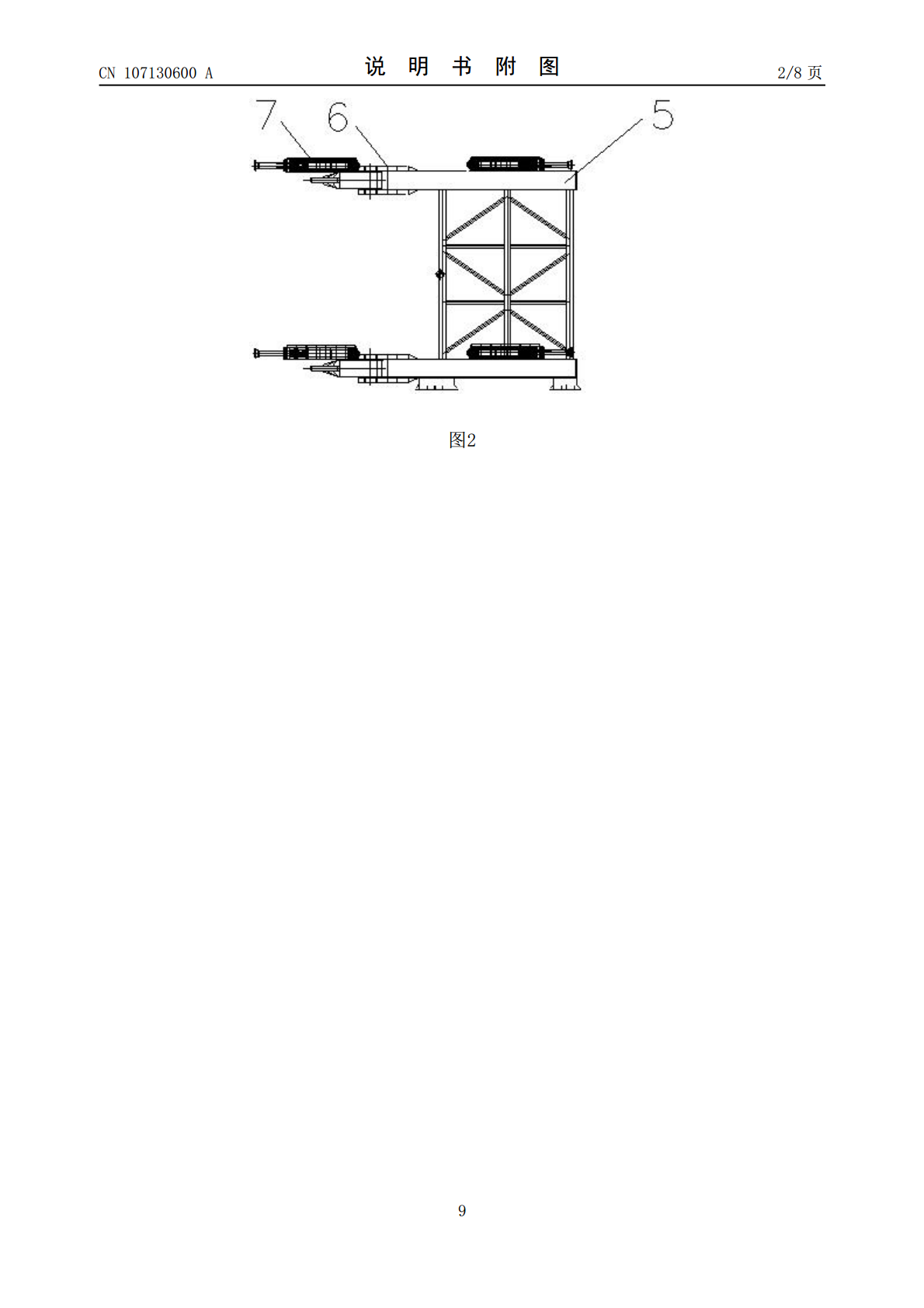
本发明公开了一种迁徙式自动纠偏单桩抱桩器施工机构,包括抱桩器基座,抱桩器基座上设有抱桩器,抱桩器上设有抱环,抱环上设有摆块,摆块上设有轮盒,轮盒焊接在摆块上,抱桩器支架上安装V型机构,抱桩器基座下部设有插臂总成,插臂总成嵌入在驳船上,驳船上设有吊机,同时还公开了抱桩器的施工方法,主要包括预装抱桩器总成、移船至指定位置、打辅助定位桩、驳船撤离、打开摆块、起吊钢管桩、十字抱紧、GPS定位、打桩并监测垂直度、液压锤沉桩、迁徙抱桩总成等步骤;本发明优点是:沉桩准确定位,自动纠偏,工艺便捷,运输方便,效率快速,成本
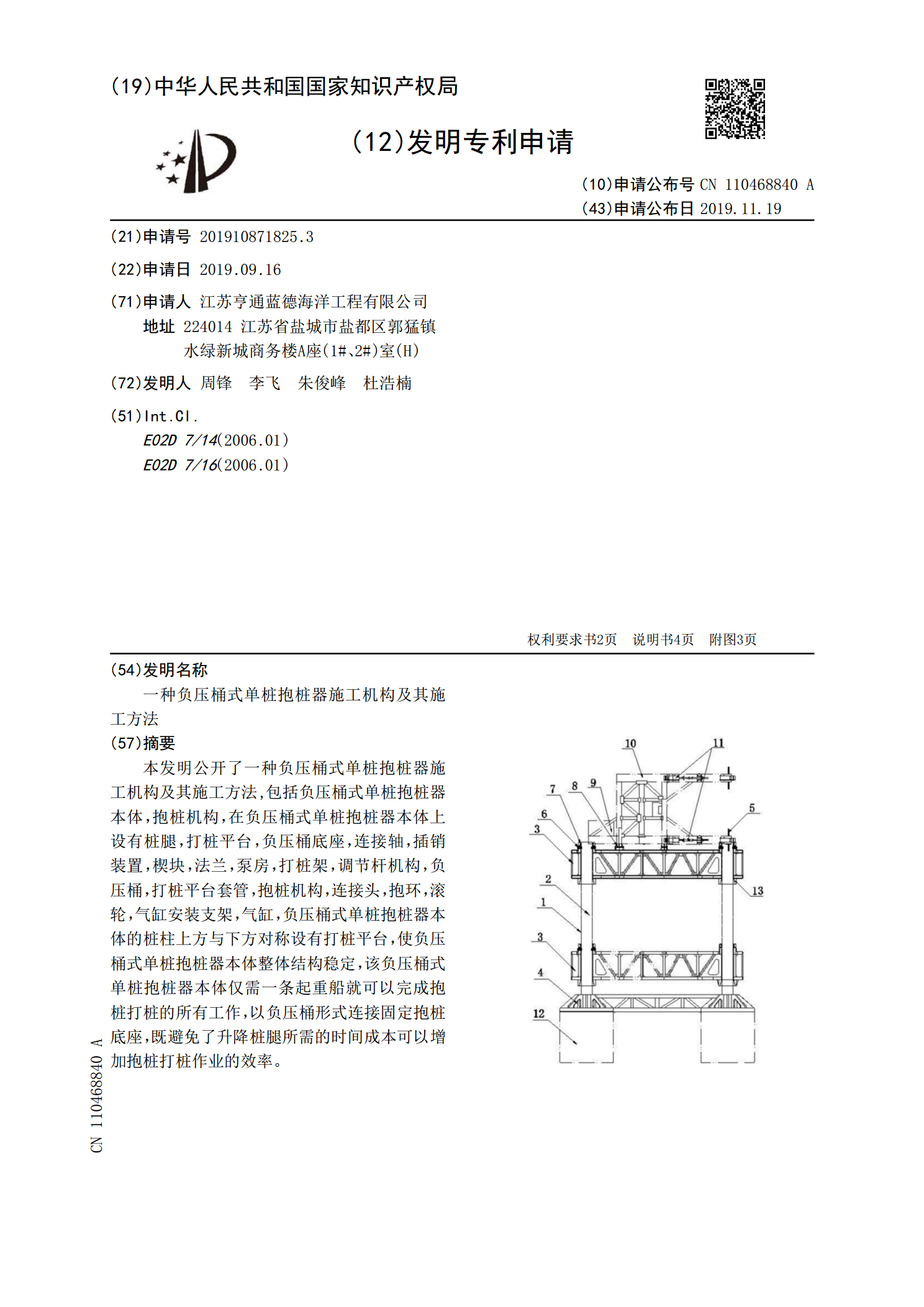
一种负压桶式单桩抱桩器施工机构及其施工方法.pdf
本发明公开了一种负压桶式单桩抱桩器施工机构及其施工方法,包括负压桶式单桩抱桩器本体,抱桩机构,在负压桶式单桩抱桩器本体上设有桩腿,打桩平台,负压桶底座,连接轴,插销装置,楔块,法兰,泵房,打桩架,调节杆机构,负压桶,打桩平台套管,抱桩机构,连接头,抱环,滚轮,气缸安装支架,气缸,负压桶式单桩抱桩器本体的桩柱上方与下方对称设有打桩平台,使负压桶式单桩抱桩器本体整体结构稳定,该负压桶式单桩抱桩器本体仅需一条起重船就可以完成抱桩打桩的所有工作,以负压桶形式连接固定抱桩底座,既避免了升降桩腿所需的时间成本可以增加

一种超大纠偏力的多桩径抱桩机.pdf
本发明公开了一种超大纠偏力的多桩径抱桩机,包括:第一立柱、与第一立柱平行且间隔设置的第二立柱、旋转连接于第一立柱与第一立柱上的第一臂架及旋转连接于第一立柱与第一立柱上的第二臂架,第一臂架与第二臂架之间平行且间隔设置,第一臂架所在的水平面与第一立柱所在的水平面相互垂直,且第一臂架与第二臂架结构相同;第一臂架内壁上均匀设置有至少四个触头件;第一立柱与第二立柱之间设置有横拉件,横拉件的整下方设置有斜拉件;第一臂架与第二臂架均通过旋转件转动连接于第一立柱与第二立柱上。根据本发明,抱桩直径大、纠偏力大及抗盐雾腐蚀和
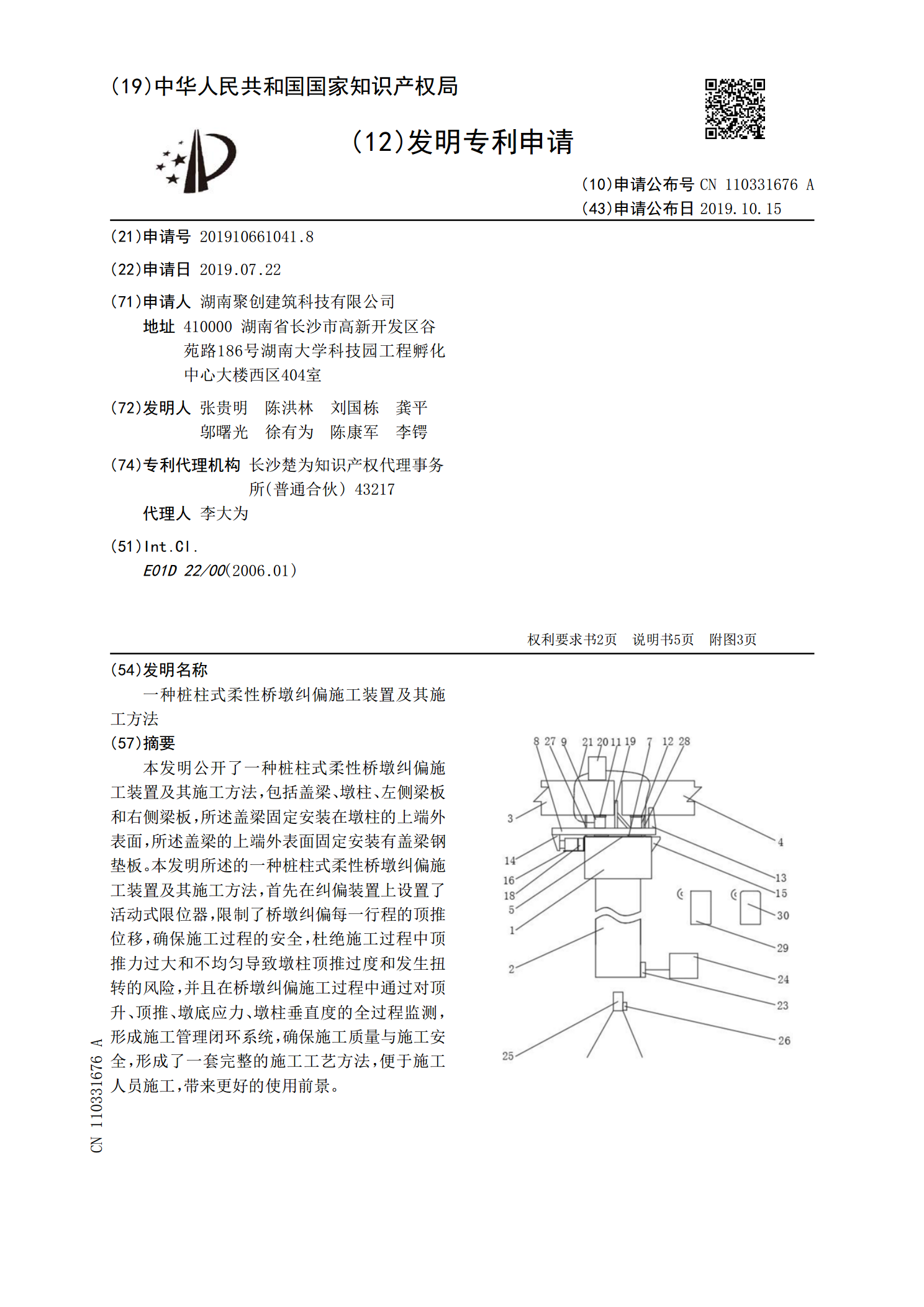
一种桩柱式柔性桥墩纠偏施工装置及其施工方法.pdf
本发明公开了一种桩柱式柔性桥墩纠偏施工装置及其施工方法,包括盖梁、墩柱、左侧梁板和右侧梁板,所述盖梁固定安装在墩柱的上端外表面,所述盖梁的上端外表面固定安装有盖梁钢垫板。本发明所述的一种桩柱式柔性桥墩纠偏施工装置及其施工方法,首先在纠偏装置上设置了活动式限位器,限制了桥墩纠偏每一行程的顶推位移,确保施工过程的安全,杜绝施工过程中顶推力过大和不均匀导致墩柱顶推过度和发生扭转的风险,并且在桥墩纠偏施工过程中通过对顶升、顶推、墩底应力、墩柱垂直度的全过程监测,形成施工管理闭环系统,确保施工质量与施工安全,形成了
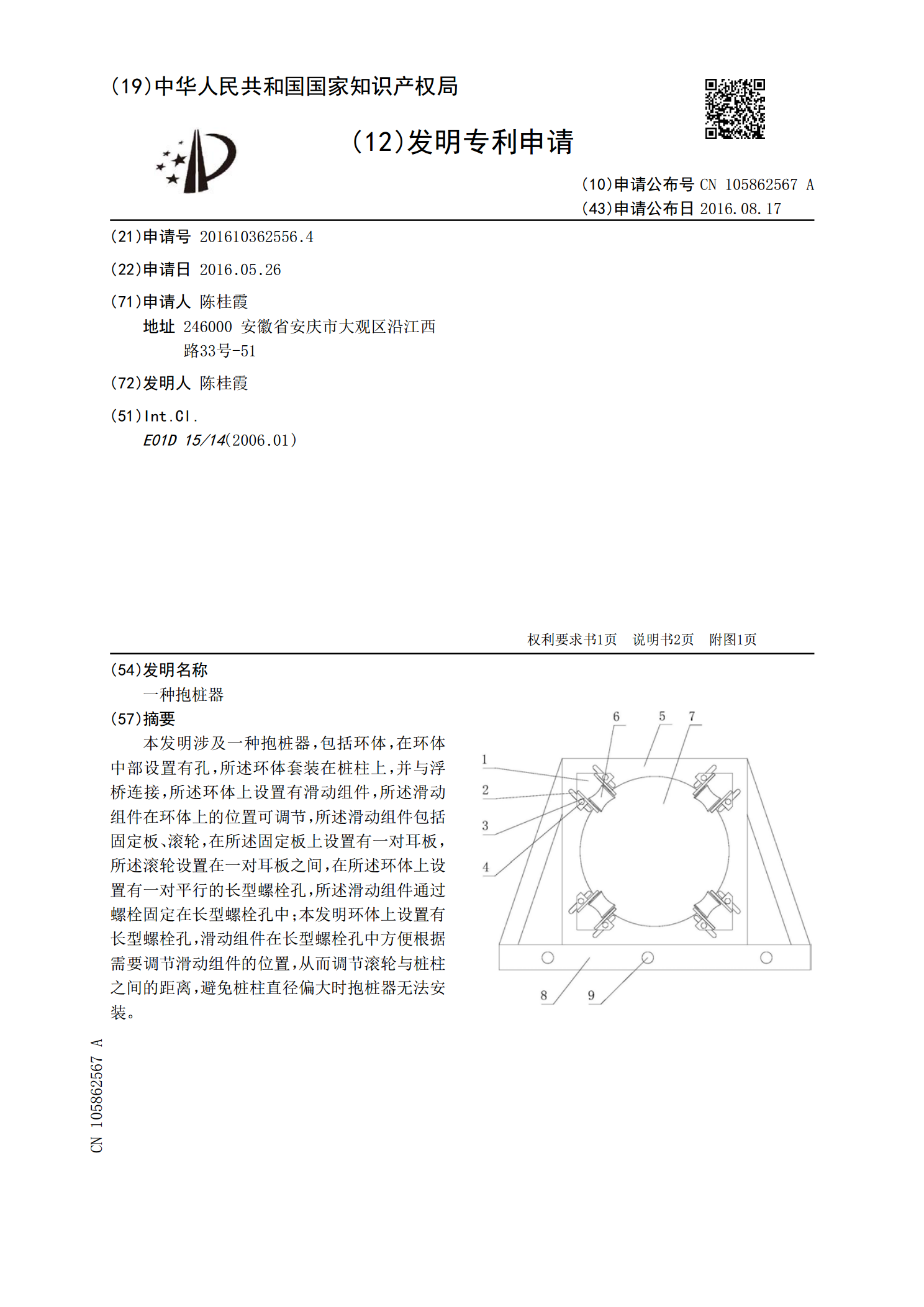
一种抱桩器.pdf
本发明涉及一种抱桩器,包括环体,在环体中部设置有孔,所述环体套装在桩柱上,并与浮桥连接,所述环体上设置有滑动组件,所述滑动组件在环体上的位置可调节,所述滑动组件包括固定板、滚轮,在所述固定板上设置有一对耳板,所述滚轮设置在一对耳板之间,在所述环体上设置有一对平行的长型螺栓孔,所述滑动组件通过螺栓固定在长型螺栓孔中;本发明环体上设置有长型螺栓孔,滑动组件在长型螺栓孔中方便根据需要调节滑动组件的位置,从而调节滚轮与桩柱之间的距离,避免桩柱直径偏大时抱桩器无法安装。