
《控制系统设计与仿真》课程教学大纲.pdf

努力****弘毅

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

《控制系统设计与仿真》课程教学大纲.pdf
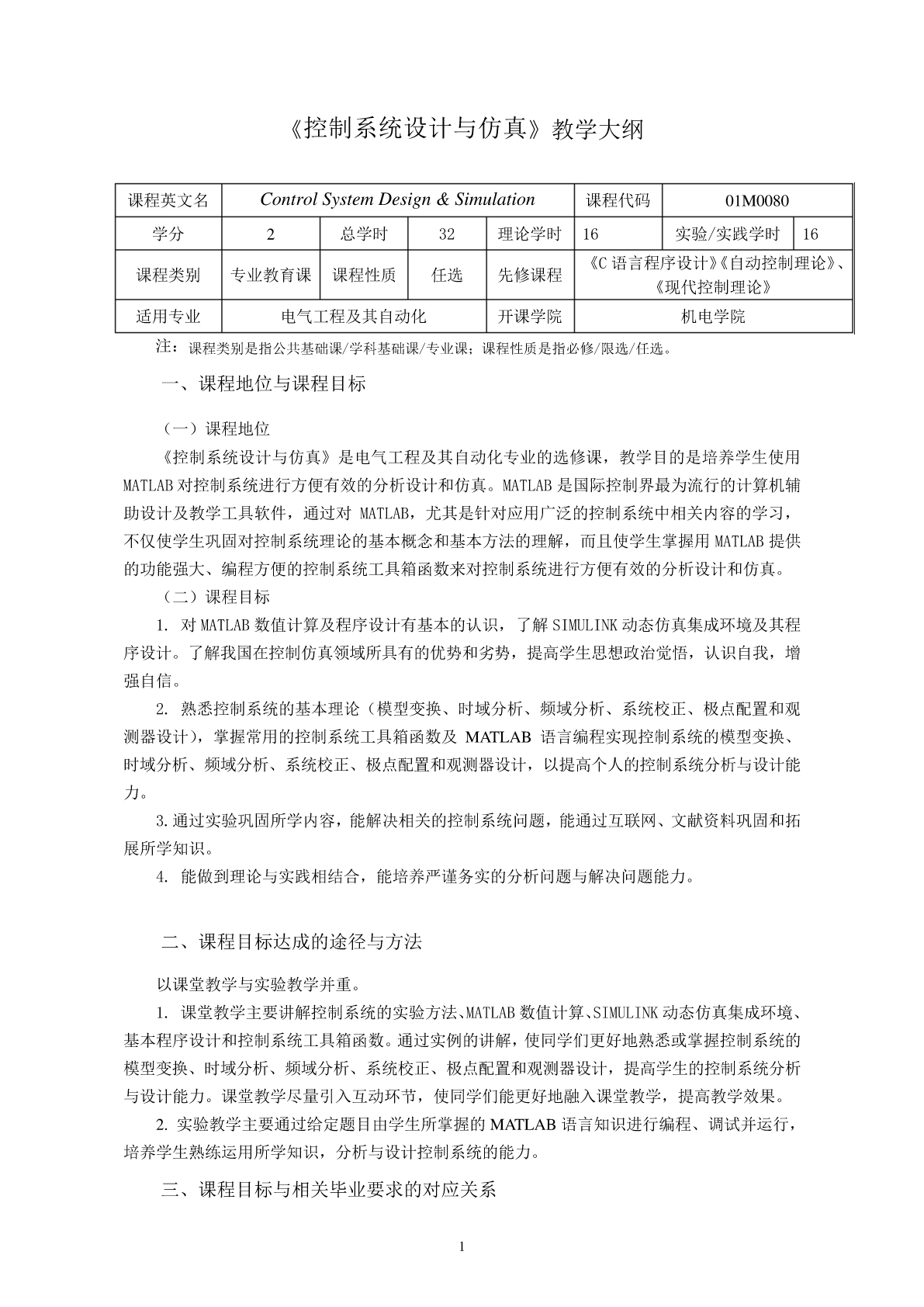
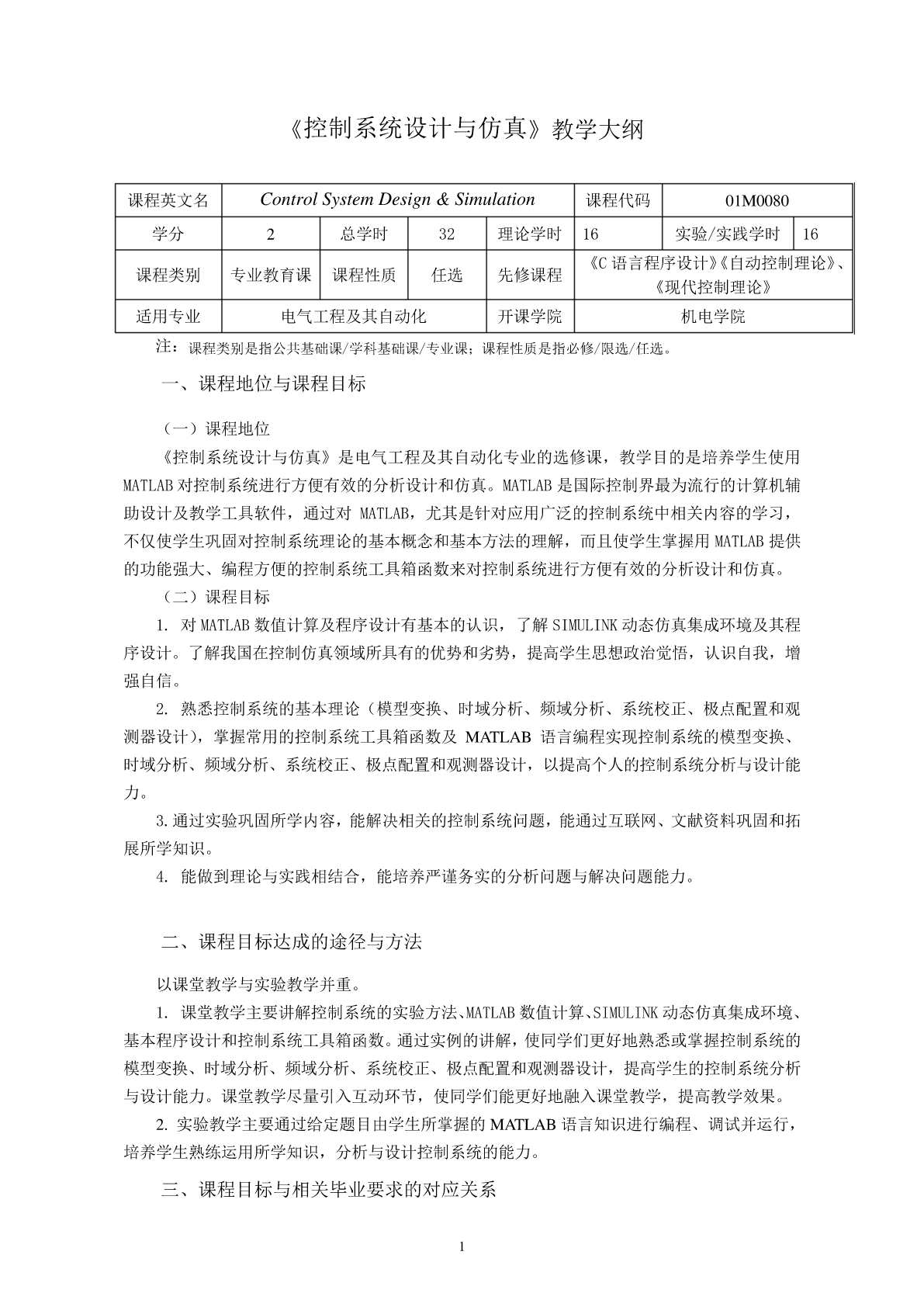
《控制系统设计与仿真》教学大纲课程英文名ControlSystemDesign&Simulation课程代码01M0080学分2总学时32理论学时16实验/实践学时16《C语言程序设计》《自动控制理论》、课程类别专业教育课课程性质任选先修课程《现代控制理论》适用专业电气工程及其自动化开课学院机电学院注:课程类别是指公共基础课/学科基础课/专业课;课程性质是指必修/限选/任选。一、课程地位与课程目标(一)课程地位《控制系统设计与仿真》是电气工程及其自动化专业的选修课,教学目的是培养学生使用MATLAB对控制
《控制系统设计与仿真》课程教学大纲.pdf
《控制系统设计与仿真》教学大纲课程英文名ControlSystemDesign&Simulation课程代码01M0080学分2总学时32理论学时16实验/实践学时16《C语言程序设计》《自动控制理论》、课程类别专业教育课课程性质任选先修课程《现代控制理论》适用专业电气工程及其自动化开课学院机电学院注:课程类别是指公共基础课/学科基础课/专业课;课程性质是指必修/限选/任选。一、课程地位与课程目标(一)课程地位《控制系统设计与仿真》是电气工程及其自动化专业的选修课,教学目的是培养学生使用MATLAB对控制
Matlab与控制系统仿真课程教学大纲.pdf
Matlab与控制系统仿真课程教学大纲(总学时数:32,学分数:2)一、课程设计的性质、任务和目的本课程是车辆工程专业选修课程。通过本课程的学习,使学生初步掌握MATLAB语言的基本知识,结合所学《控制工程基础》课程,学会运用MATLAB语言进行控制系统仿真和辅助设计的基本技能,为今后从事科学研究打下较好的基础。二、课程设计的内容和基本要求第一章计算机仿真和辅助设计概述了解控制系统计算机仿真和辅助设计的必要性、可能性以及计算机仿真与辅助设计的基本思路、基本方法和发展现状。第二章MATLAB语言基础第一节使

《Matlab与控制系统仿真实习》课程教学大纲.doc
《Matlab与控制系统仿真实习》课程教学大纲课程编号:0806933211课程名称:Matlab与控制系统仿真实习英文名称:PracticeofMatlab&ControlSystemSimulation课程类型:实践课总学时:1周学分:1适用对象:自动化系统集成先修课程:高等数学线性代数复变函数积分变换电路电子技术基础(模拟)自动控制元件自动控制原理MATLAB仿真语言及Simulink动态仿真工具课程性质、目的和任务本课程设计是《自动控制原理》课程的具体应用和实践,自动化专业的各项基础课和专业课知识

控制系统仿真课程设计.docx
引言1.1MATLAB软件简介MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科