
气动抓胶机.pdf

An****99


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气动抓胶机.pdf
本发明涉及一种气动抓胶机,属于轮胎制造行业。本发明由立柱总成、旋臂总成、滑轨总成、加强筋、气控平衡吊、气爪总成组成。气爪总成包括气缸、吊耳、固定爪部件、筋板、随动爪部件。气爪总成可在立柱设定范围内做旋转、水平及垂直方向自由运动。气爪总成的张开、闭合由气缸实现。本发明的有益效果是操作简单、抓取位置任意、放置位置可控、安全性强、效率高、能耗小。

一种抓胶机装置.pdf
本发明公开了一种抓胶机装置,包括:框体;升降装置,所述升降装置安装于所述框体的内壁底端;抓胶装置,所述抓胶装置设于所述升降装置上;运送装置,所述运送装置设于所述框体内壁底部,所述运送装置位于所述框体内;通过升降装置调节抓胶装置,使得抓胶装置抓住胶片后可以带动胶片运动,使得需要人工完成接续的运送通过抓胶装置和升降装置完成,避免了人工接取胶片,工人工作效率低,同时避免了工人直接接触胶片减少了对工人身体健康的危害,提高了胶片的运送效率。

一种施胶机的气动引纸装置.pdf
本发明涉及一种施胶机的气动引纸装置,该装置的施胶机机架的两端上对称设置,在二根压辊的下部以及机架上设有摆动气缸支架和摆动杠杆支架,摆动杠杆通过摆动轴连接在摆动杠杆支架上,摆动气缸支架上的摆动气缸通过推动轴与摆动杠杆的一端相连接,摆动杠杆的另一端与双绳引纸绳轮相连接;在二根压辊的侧部以及机架上设有挡胶板支架,挡胶板支架上固定有挡胶气缸、定位轴套和滑动轴套,定位轴设在定位轴套中,滑动轴设在滑支轴套中,挡胶板连接在定位轴和滑动轴上,且滑动轴与挡胶气缸相连接。采用发明,通过摆动气缸控制双绳引纸绳轮,通过挡胶气缸控
一种多工位可调节气动胶针机.pdf
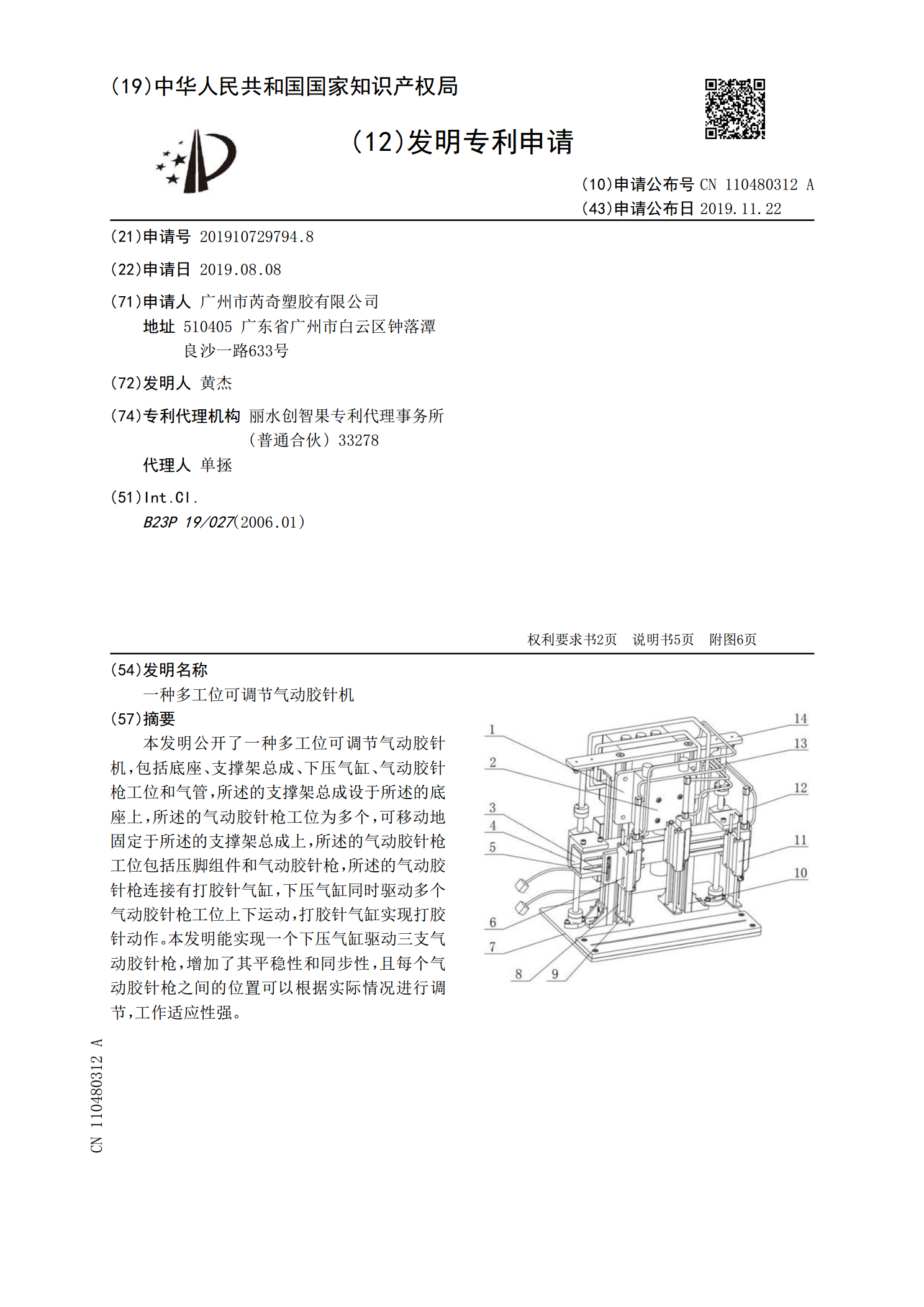
本发明公开了一种多工位可调节气动胶针机,包括底座、支撑架总成、下压气缸、气动胶针枪工位和气管,所述的支撑架总成设于所述的底座上,所述的气动胶针枪工位为多个,可移动地固定于所述的支撑架总成上,所述的气动胶针枪工位包括压脚组件和气动胶针枪,所述的气动胶针枪连接有打胶针气缸,下压气缸同时驱动多个气动胶针枪工位上下运动,打胶针气缸实现打胶针动作。本发明能实现一个下压气缸驱动三支气动胶针枪,增加了其平稳性和同步性,且每个气动胶针枪之间的位置可以根据实际情况进行调节,工作适应性强。

纸袋糊底机及纸袋糊底机上胶气动离合机构.pdf
本发明公开了一种纸袋糊底机及纸袋糊底机上胶气动离合机构,其中纸袋糊底机上胶气动离合机构包括供胶组件、上胶滚筒组件、离合组件和驱动组件,上胶滚筒组件包括上胶滚筒轴、上胶滚筒和偏心齿轮,上胶滚筒轴两端的轴承分别嵌装于偏心齿轮的偏心轴承孔内,上胶滚筒轴上设有传动齿轮,离合组件包括摆动气缸和摆动轴,摆动轴的两端设有离合齿轮,离合齿轮与偏心齿轮相啮合。本发明,因为设有偏心齿轮和离合组件,可以实现上胶时上胶滚筒与供胶筒分离然后与胶盘贴合,不上胶时上胶滚筒与胶盘分离回到供胶筒内,避免了上胶滚筒、胶盘粘有太多胶水而滴落在