
一种侧扫声纳成像的水下目标快速提取方法.pdf

是你****嘉嘉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种侧扫声纳成像的水下目标快速提取方法.pdf
本发明公开了一种侧扫声纳成像的水下目标快速提取方法,可以对侧扫声纳图像进行实时分析,快速提取水下目标。先对乘性噪声突出的侧扫声纳图像进行自适应非线性复扩散模型滤波,改善侧扫声纳图像中噪声问题;去噪声纳图进行预分割,并自动确定声纳图像的目标区、海底混响区、阴影区;将预分割结果轮廓重定义,减少分割过程中,水平集模型演化时不断重定义初始水平集所用时间;选取目标区和阴影区进行基于变分水平集模型的演化和分割;最后对待提取目标进行二值化,给操作人员展示明确的三区域分割结果。本发明对实时侧扫声纳进行目标提取,具检测实时
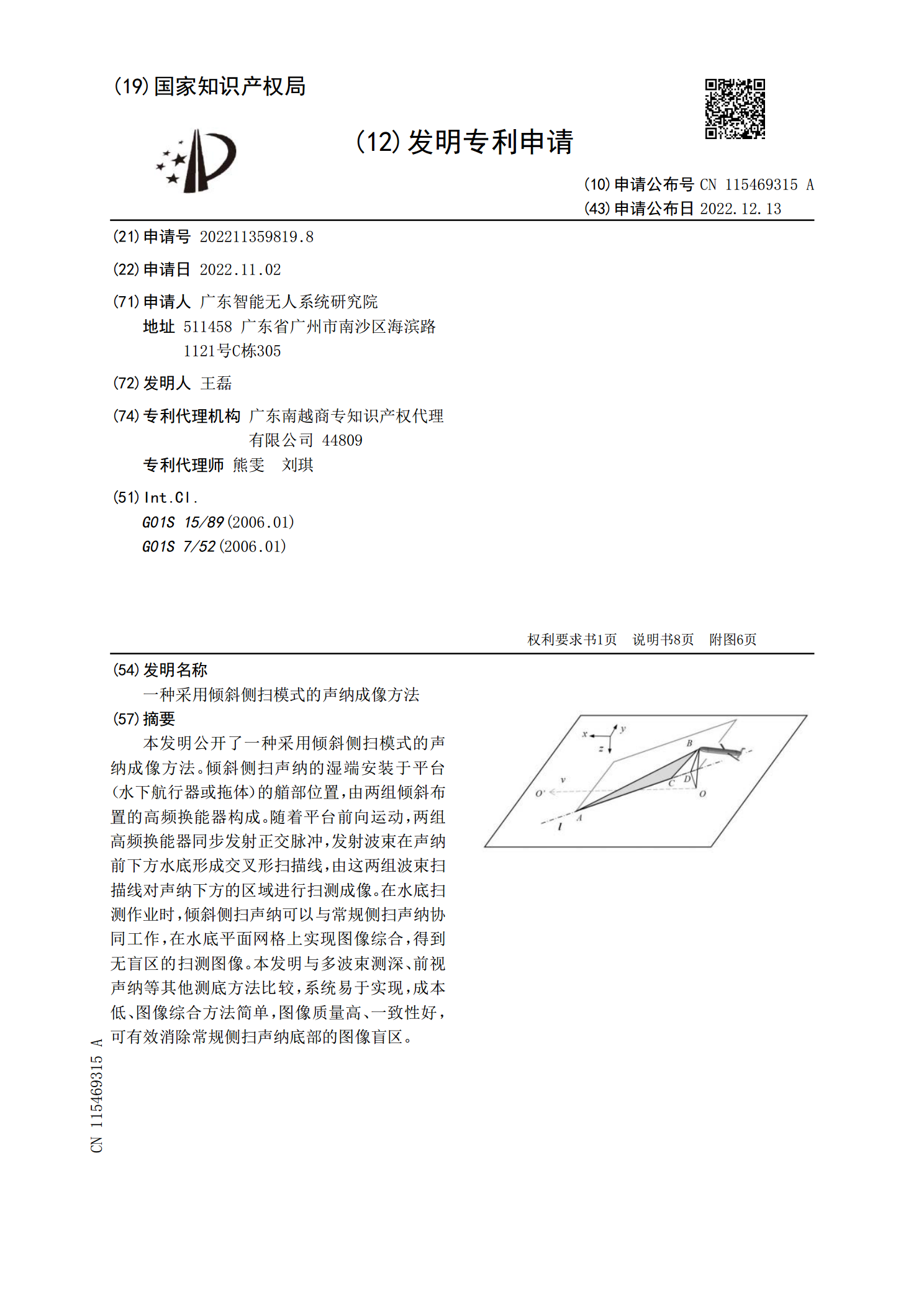
一种采用倾斜侧扫模式的声纳成像方法.pdf
本发明公开了一种采用倾斜侧扫模式的声纳成像方法。倾斜侧扫声纳的湿端安装于平台(水下航行器或拖体)的艏部位置,由两组倾斜布置的高频换能器构成。随着平台前向运动,两组高频换能器同步发射正交脉冲,发射波束在声纳前下方水底形成交叉形扫描线,由这两组波束扫描线对声纳下方的区域进行扫测成像。在水底扫测作业时,倾斜侧扫声纳可以与常规侧扫声纳协同工作,在水底平面网格上实现图像综合,得到无盲区的扫测图像。本发明与多波束测深、前视声纳等其他测底方法比较,系统易于实现,成本低、图像综合方法简单,图像质量高、一致性好,可有效消除
浅析侧扫声纳在水下搜寻救助作业中的应用.pptx
汇报人:/目录0102声纳系统概述侧扫声纳工作原理侧扫声纳系统组成03侧扫声纳在水下搜寻中的应用侧扫声纳在水下救助作业中的应用侧扫声纳在打捞行业的应用04侧扫声纳的优点侧扫声纳的局限性侧扫声纳的改进方向05侧扫声纳技术发展趋势侧扫声纳在水下搜寻救助作业中的未来展望侧扫声纳在其他领域的应用前景06侧扫声纳在水下搜寻救助作业中的成功案例侧扫声纳在水下搜寻救助作业中的挑战与应对策略侧扫声纳在水下搜寻救助作业中的经验教训与改进建议汇报人:

浅析侧扫声纳在水下搜寻救助作业中的应用.docx
浅析侧扫声纳在水下搜寻救助作业中的应用随着人们对海洋资源的开发和利用,水下救助作业变得越来越重要。在水下救助作业中,利用声纳探测技术对水下目标进行探测已经成为一种非常有效的手段。而侧扫声纳是目前应用最为广泛的一种声纳探测技术。本文将对侧扫声纳在水下搜救作业中的应用进行浅析。一、侧扫声纳的原理及特点侧扫声纳是一种通过侧向扫描的方式获取水下物体图像的声纳设备。作为一种高分辨率的声纳设备,它能够在相对较短的时间内扫描并生成出准确的水下环境图像,同时还能够通过对目标反射信号的处理,获得目标的形态、尺寸、质地等信息

侧扫声纳技术在水下界址线测量中的应用.docx
侧扫声纳技术在水下界址线测量中的应用随着现代化技术的不断更新发展,各种高科技设备和技术方法不断涌现,侧扫声纳技术也是其中之一,它的应用范围十分广泛,尤其是在水下界址线测量中起着非常重要的作用。水下界址线是指为强制埋设在水中的各种管线、桥墩、码头、水泵房等工程设置的定位线。其测量是一项非常重要的工作,能够保证水下工程的施工质量和安全性。而侧扫声纳技术就是一种非常适合水下界址线测量的技术方法,它可以通过声波探测水下物体的形态、轮廓、大小、位置等细节信息,从而精确测量出水下物体的位置和坐标,为水下界址线的测量提