
基于RBF神经网络电液伺服系统智能控制的在线辨识与PID参数自适应整定.ppt

sy****28

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于RBF神经网络电液伺服系统智能控制的在线辨识与PID参数自适应整定.ppt
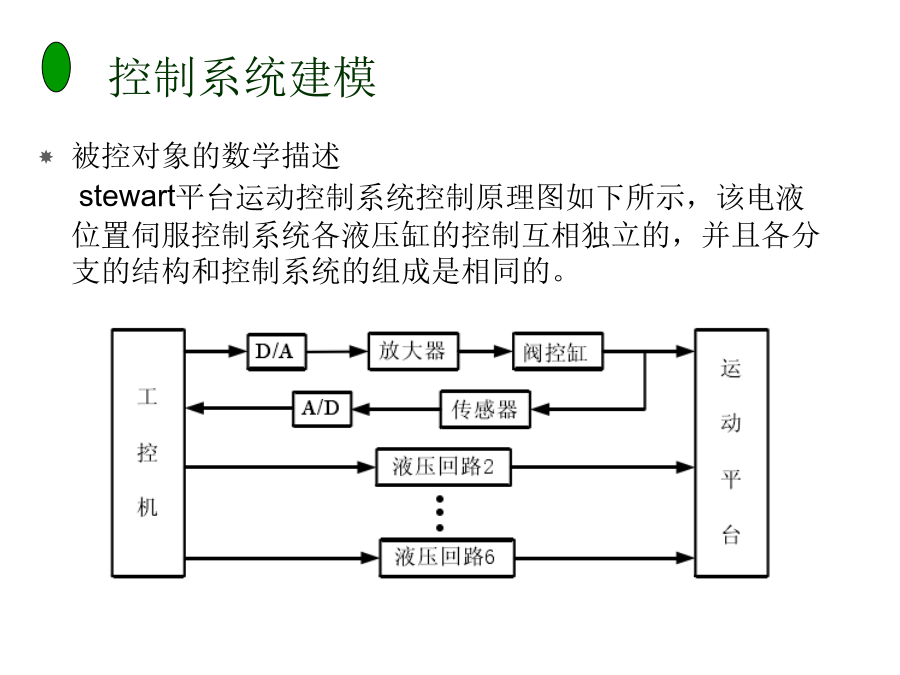
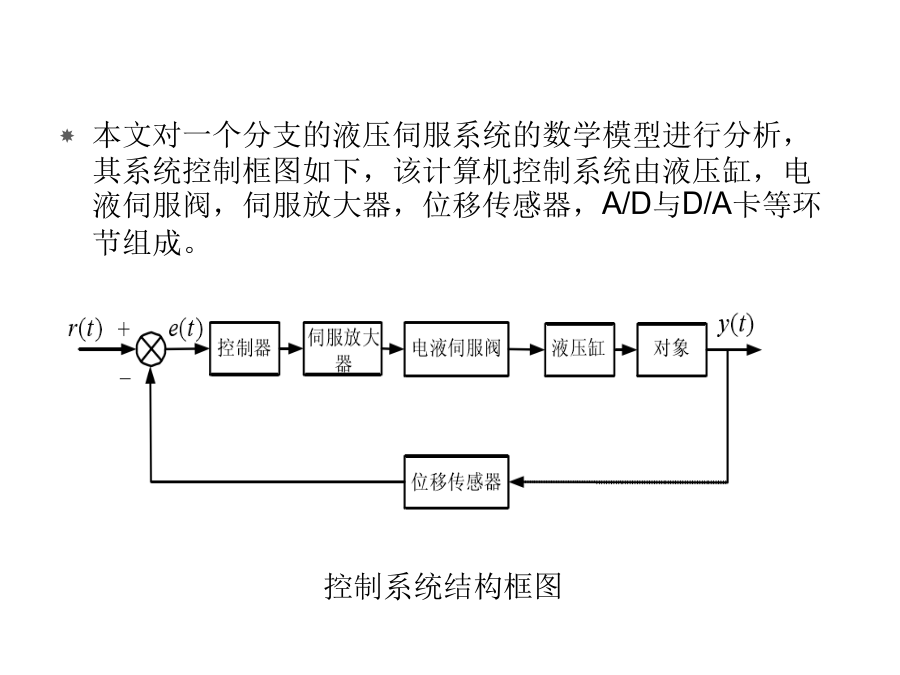
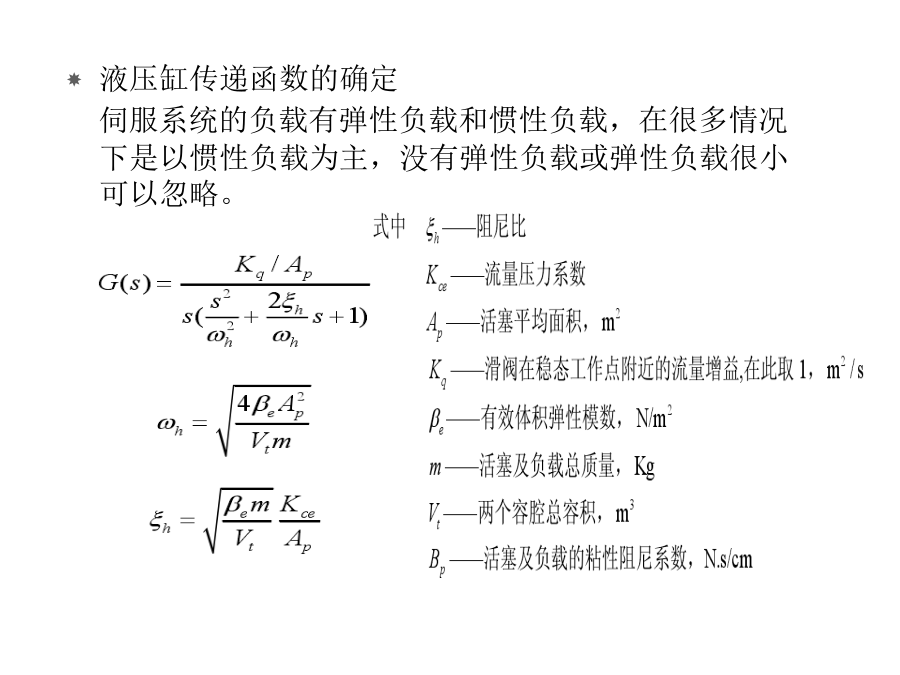
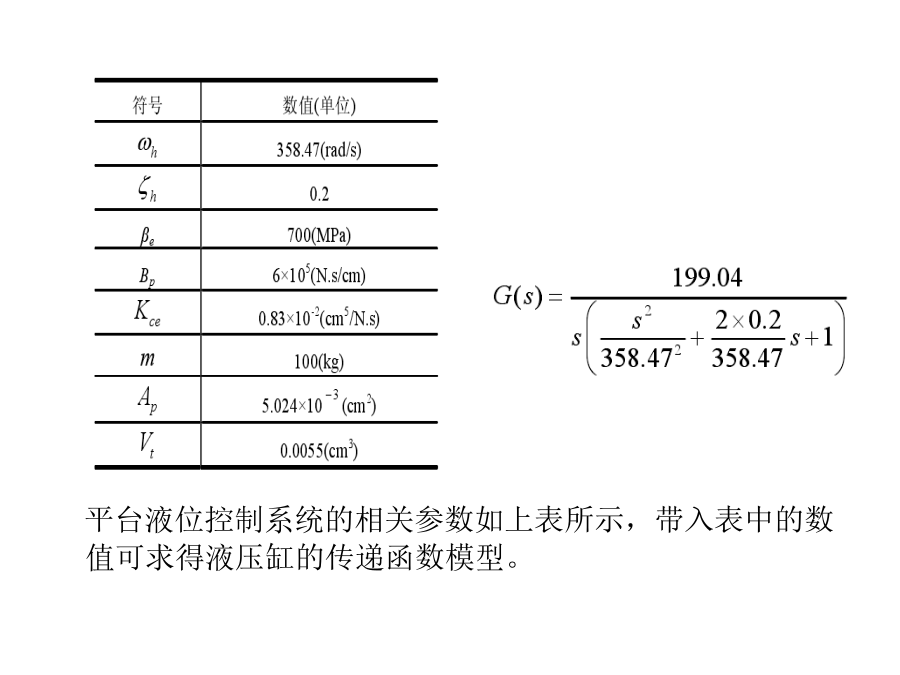
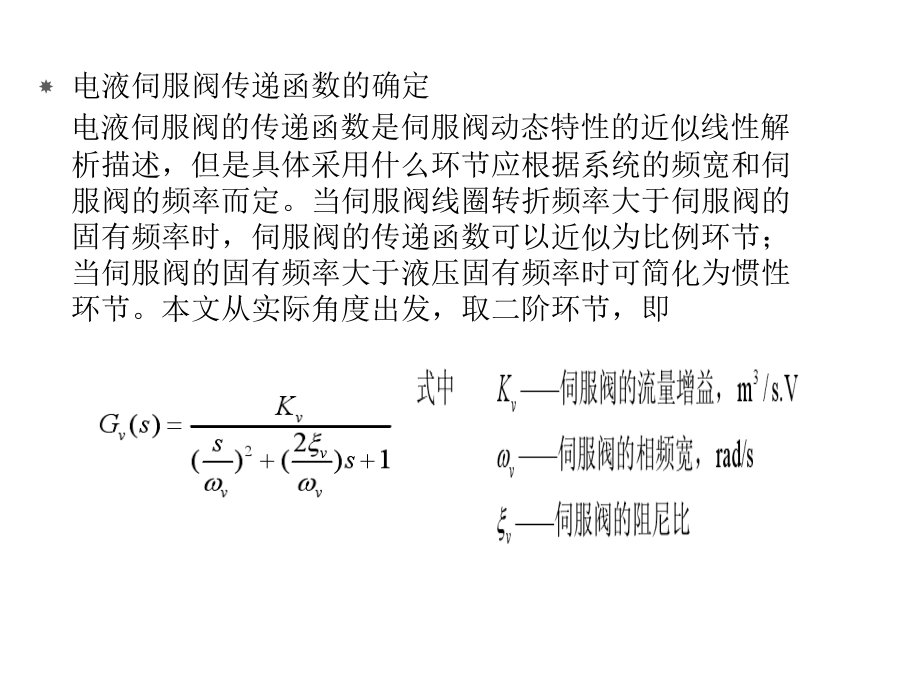
基于RBF神经网络电液伺服系统智能控制的在线辨识与PID参数自适应整定研究内容课题研究意义控制系统建模平台液位控制系统的相关参数如上表所示,带入表中的数值可求得液压缸的传递函数模型。电液伺服阀传递函数的确定电液伺服阀的传递函数是伺服阀动态特性的近似线性解析描述,但是具体采用什么环节应根据系统的频宽和伺服阀的频率而定。当伺服阀线圈转折频率大于伺服阀的固有频率时,伺服阀的传递函数可以近似为比例环节;当伺服阀的固有频率大于液压固有频率时可简化为惯性环节。本文从实际角度出发,取二阶环节,即本文选用的是中国航空附件

基于RBF神经网络电液恒功率调速自整定PID控制.docx
基于RBF神经网络电液恒功率调速自整定PID控制基于RBF神经网络电液恒功率调速自整定PID控制摘要:随着电力系统的不断发展,对电机的要求也越来越高。而电液恒功率调速是通过控制电机转速来达到恒定功率输出的一种方法,具有广泛的应用。本文基于RBF神经网络的自整定PID控制算法,针对电液恒功率调速系统进行了研究。通过分析电液恒功率调速系统的特点和结构,建立其数学模型,并设计了自整定PID控制器。通过引入RBF神经网络进行PID参数的在线自整定,提高了系统的适应性和鲁棒性。关键词:电液恒功率调速;RBF神经网络

基于RBF神经网络的PID控制整定.docx
基于RBF神经网络的PID控制整定一、引言在现代控制领域中,PID控制器是一种最常见和常用的控制方法,它以其简单但有效的控制规则而受到广泛应用。然而,由于PID控制器参数整定具有挑战性,因此过去的几十年中,许多研究人员都致力于优化PID控制器的整定方法。二、PID控制器PID控制器是一种基于当前误差、误差积分项和误差微分项的常见控制器。PID分别代表比例、积分和微分,其中,比例项与当前误差成正比,积分项是过去误差的积分,微分项是误差变化的微分。PID控制器的控制器输入是一个误差信号,输出是一个控制信号,用

基于RBF神经网络船舶传动电液恒功率调速自整定PID控制.pptx
汇报人:/目录0102RBF神经网络基本结构RBF神经网络学习算法RBF神经网络在船舶传动电液恒功率调速自整定PID控制中的应用03船舶传动电液恒功率调速系统的组成船舶传动电液恒功率调速系统的原理船舶传动电液恒功率调速系统的特点04PID控制算法原理自整定PID控制算法的实现过程自整定PID控制算法在船舶传动电液恒功率调速系统中的应用05基于RBF神经网络的自整定PID控制算法的实现过程基于RBF神经网络的自整定PID控制算法的优点基于RBF神经网络的自整定PID控制算法在船舶传动电液恒功率调速系统中的应

基于遗传算法的伺服系统PID控制参数整定.docx
基于遗传算法的伺服系统PID控制参数整定基于遗传算法的伺服系统PID控制参数整定摘要:PID控制器是一种广泛应用于工业和自动化控制领域的控制器。然而,PID控制器的性能受到其参数的选择的限制。本文提出了一种基于遗传算法的方法来整定伺服系统的PID控制参数。遗传算法作为一种基于自然选择和遗传进化的优化算法,具有全局搜索能力和自适应性,可以有效地搜索最优解。通过将遗传算法应用于PID控制参数整定问题,可以优化系统的稳定性、响应速度和抗扰性能。实验结果表明,基于遗传算法的伺服系统PID控制参数整定方法在不同的系