
一种光纤二次套塑张力控制装置及控制方法.pdf

一条****涛k

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种光纤二次套塑张力控制装置及控制方法.pdf
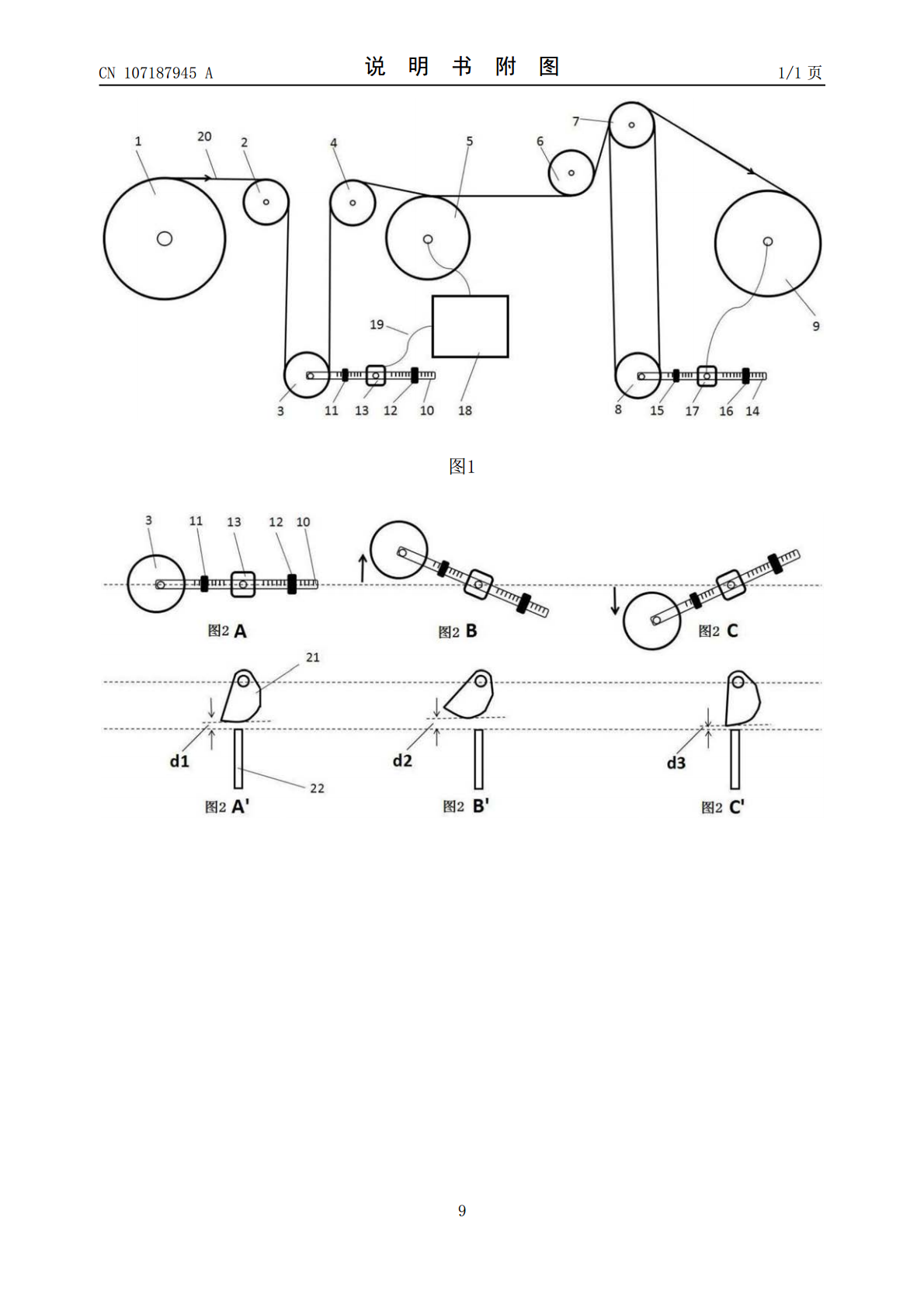
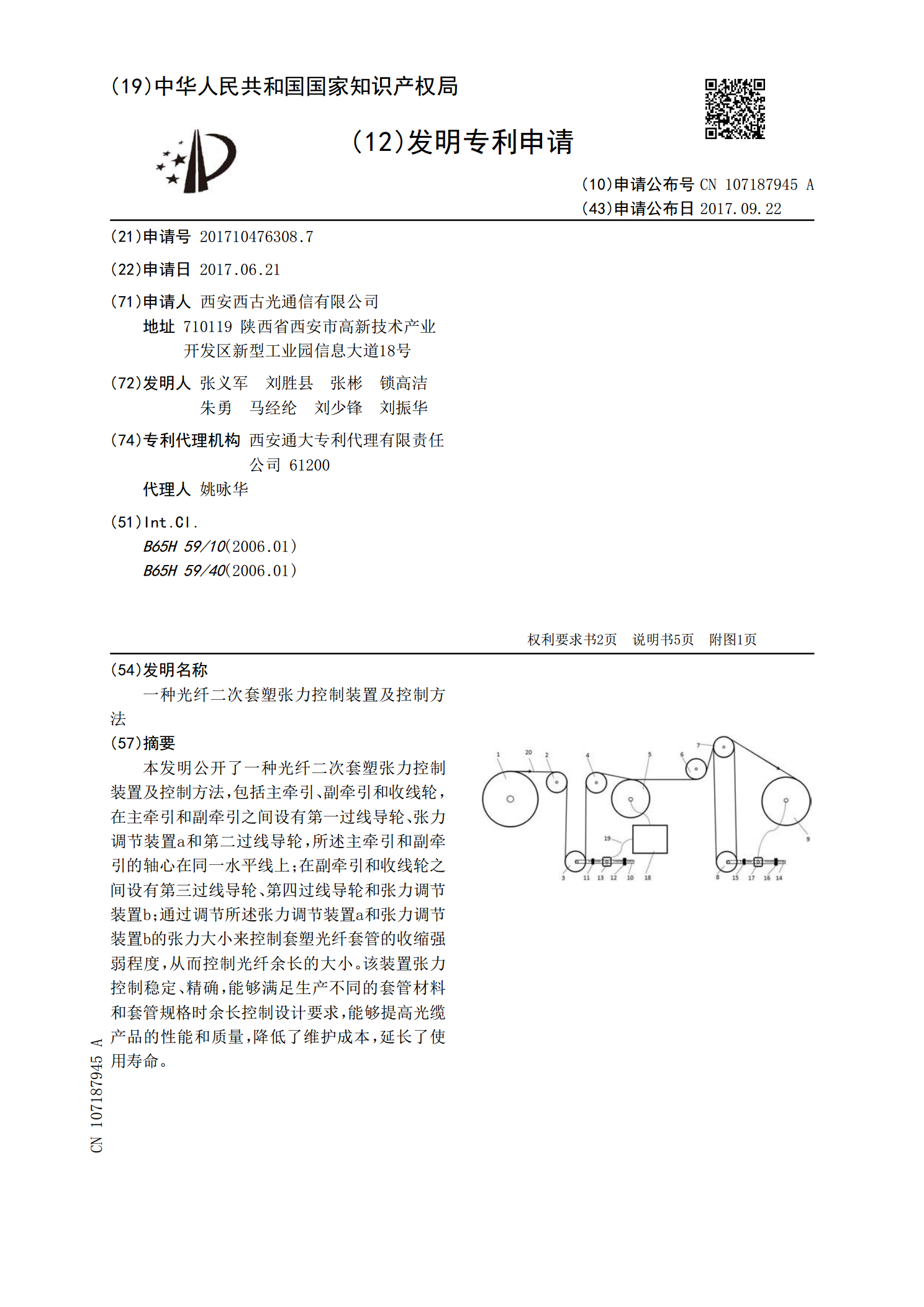
本发明公开了一种光纤二次套塑张力控制装置及控制方法,包括主牵引、副牵引和收线轮,在主牵引和副牵引之间设有第一过线导轮、张力调节装置a和第二过线导轮,所述主牵引和副牵引的轴心在同一水平线上;在副牵引和收线轮之间设有第三过线导轮、第四过线导轮和张力调节装置b;通过调节所述张力调节装置a和张力调节装置b的张力大小来控制套塑光纤套管的收缩强弱程度,从而控制光纤余长的大小。该装置张力控制稳定、精确,能够满足生产不同的套管材料和套管规格时余长控制设计要求,能够提高光缆产品的性能和质量,降低了维护成本,延长了使用寿命。
一种光纤陀螺绕环机张力控制装置及方法.pdf
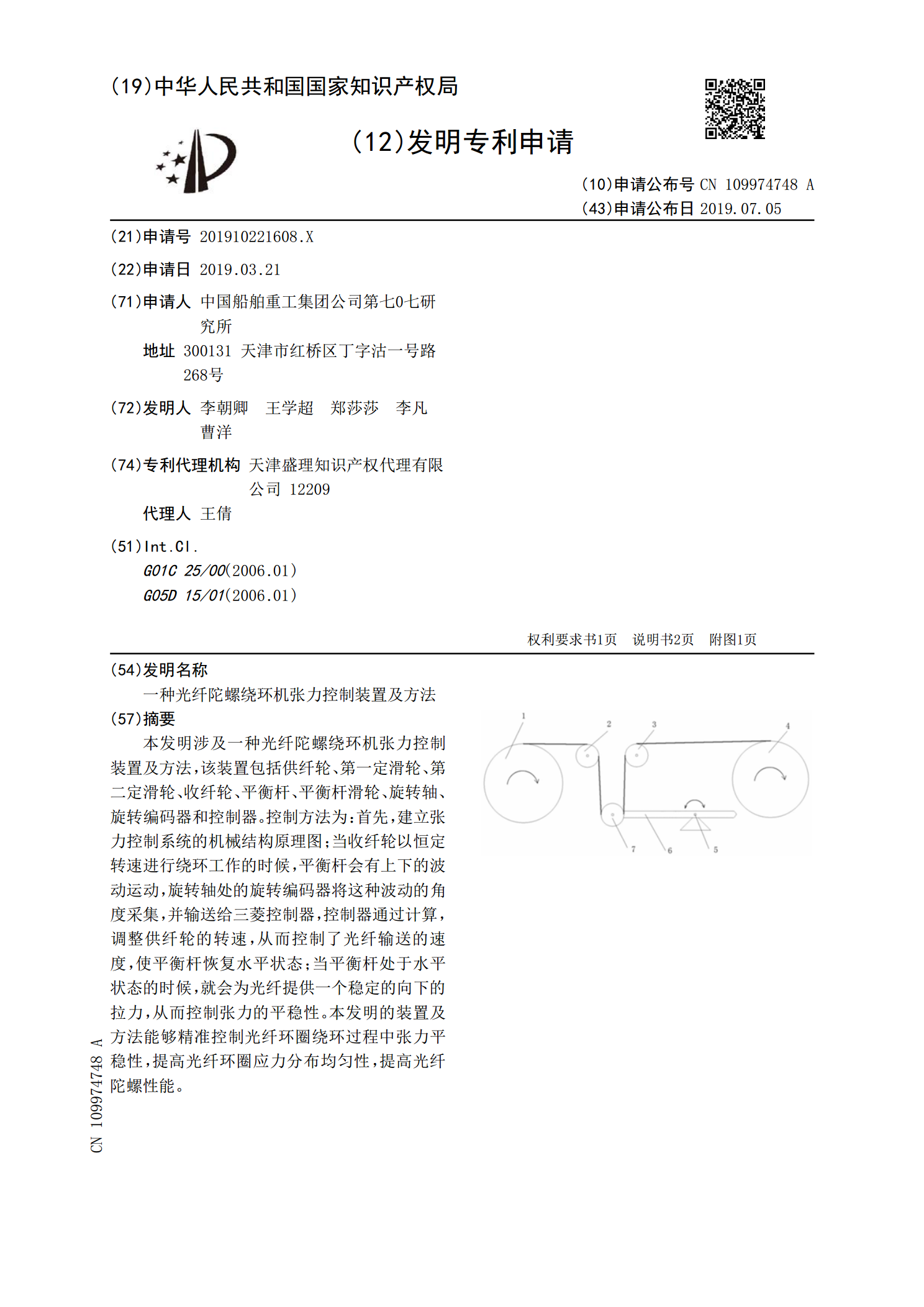
本发明涉及一种光纤陀螺绕环机张力控制装置及方法,该装置包括供纤轮、第一定滑轮、第二定滑轮、收纤轮、平衡杆、平衡杆滑轮、旋转轴、旋转编码器和控制器。控制方法为:首先,建立张力控制系统的机械结构原理图;当收纤轮以恒定转速进行绕环工作的时候,平衡杆会有上下的波动运动,旋转轴处的旋转编码器将这种波动的角度采集,并输送给三菱控制器,控制器通过计算,调整供纤轮的转速,从而控制了光纤输送的速度,使平衡杆恢复水平状态;当平衡杆处于水平状态的时候,就会为光纤提供一个稳定的向下的拉力,从而控制张力的平稳性。本发明的装置及方法

一种光纤绕线机动态张力多级控制装置及方法.pdf
本发明首先提供一种光纤绕线机动态张力多级控制装置,包括放线轮和收线环,还包括引导轮A和引导轮B,所述放线轮、引导轮A、引导轮B自左向右依次固定设置,收线环可活动设置在右侧末端,引导轮A和引导轮B之间设置有可上下移动的张紧轮,所述张紧轮下方依次固定连接有拉压力传感器和微动机构,微动机构能够使张紧轮和拉压力传感器同时上下移动,所述放线轮连接有放线轮电机,所述微动机构、拉压力传感器及放线轮电机分别与上位机相连。本发明还提供一种光纤绕线机动态张力多级控制方法。本发明运用多级控制技术,提高了光纤张力的控制精度和光纤
一种光纤二次套塑的牵引装置.pdf
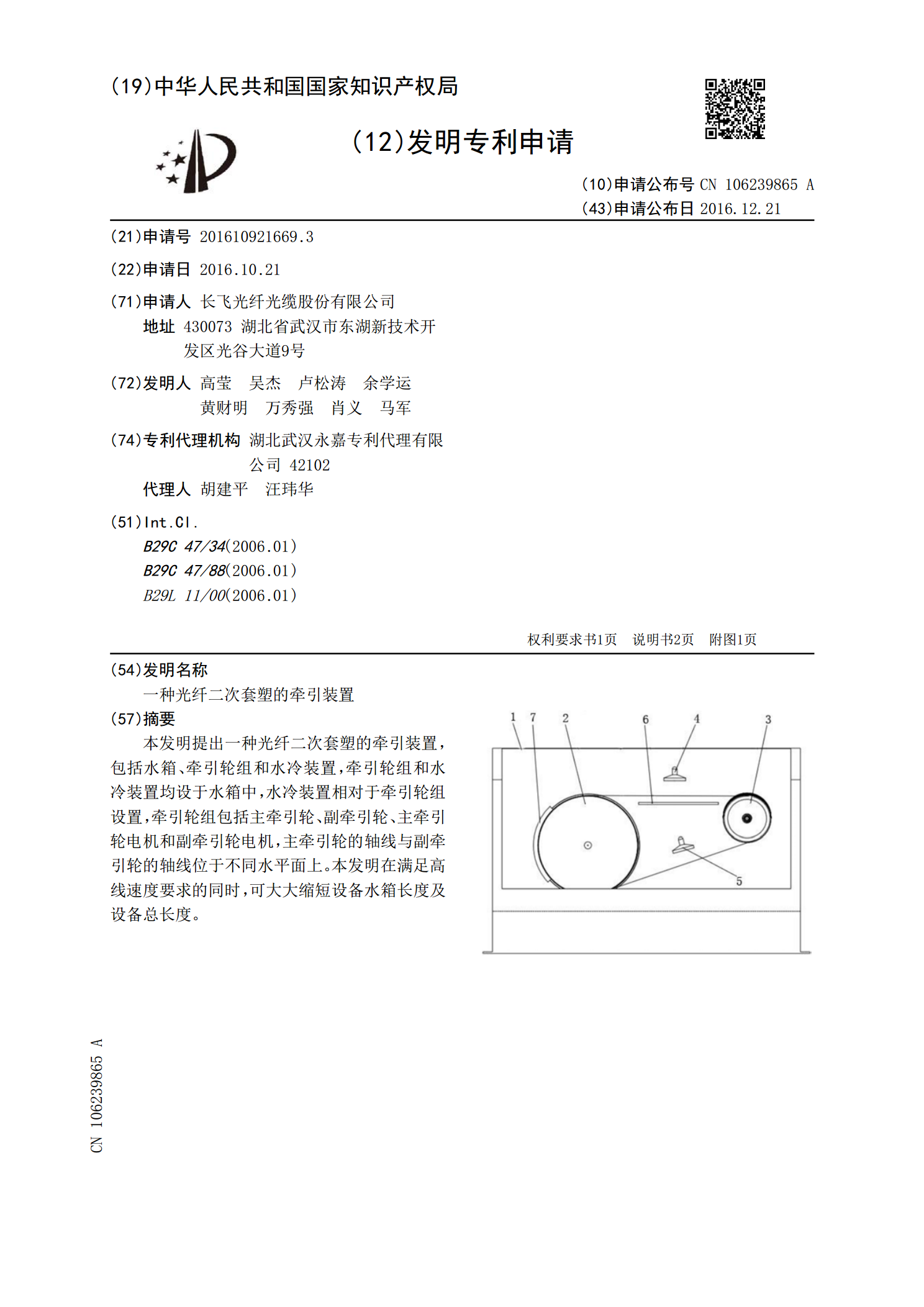
本发明提出一种光纤二次套塑的牵引装置,包括水箱、牵引轮组和水冷装置,牵引轮组和水冷装置均设于水箱中,水冷装置相对于牵引轮组设置,牵引轮组包括主牵引轮、副牵引轮、主牵引轮电机和副牵引轮电机,主牵引轮的轴线与副牵引轮的轴线位于不同水平面上。本发明在满足高线速度要求的同时,可大大缩短设备水箱长度及设备总长度。
一种光纤套塑引导装置.pdf
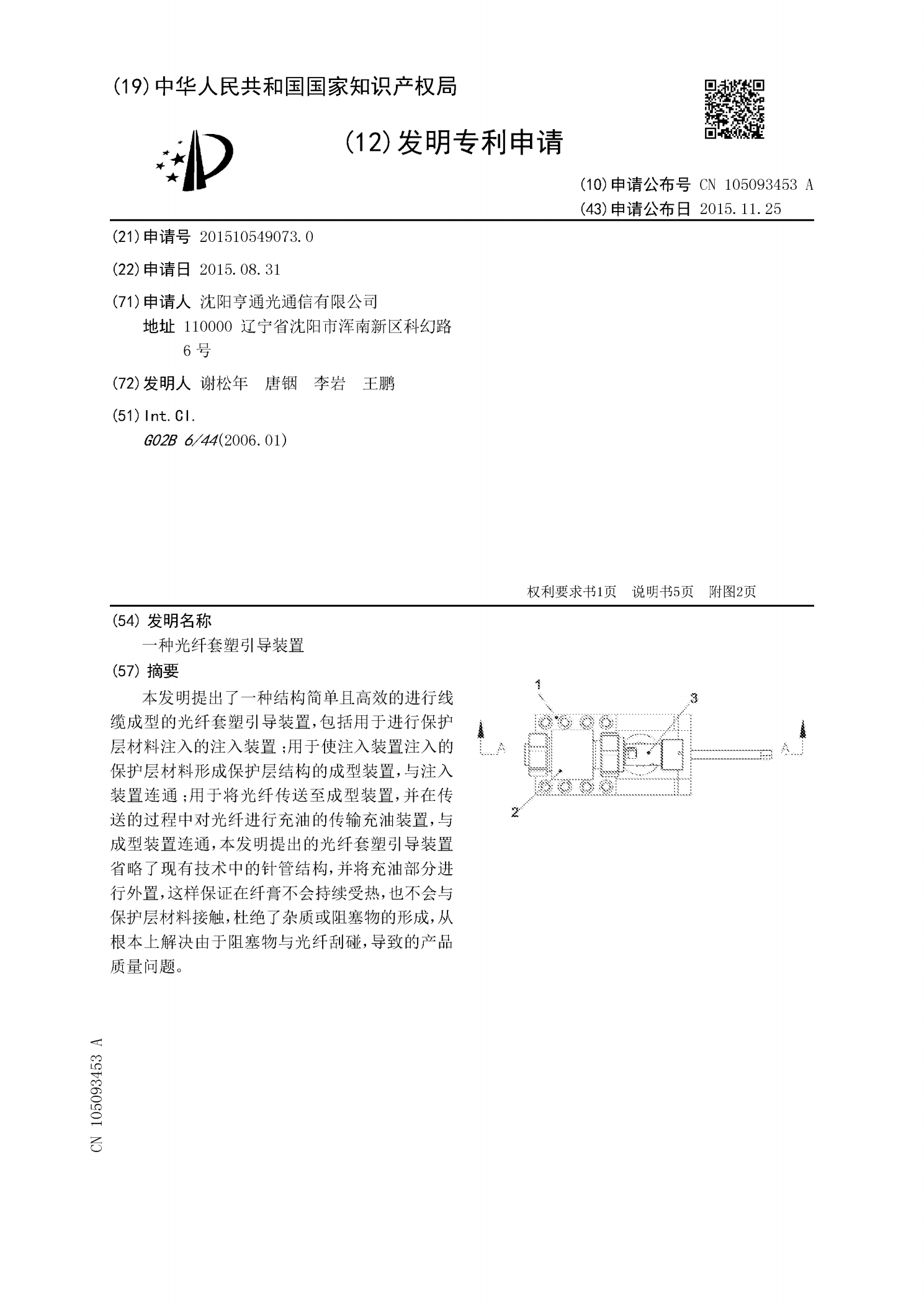
本发明提出了一种结构简单且高效的进行线缆成型的光纤套塑引导装置,包括用于进行保护层材料注入的注入装置;用于使注入装置注入的保护层材料形成保护层结构的成型装置,与注入装置连通;用于将光纤传送至成型装置,并在传送的过程中对光纤进行充油的传输充油装置,与成型装置连通,本发明提出的光纤套塑引导装置省略了现有技术中的针管结构,并将充油部分进行外置,这样保证在纤膏不会持续受热,也不会与保护层材料接触,杜绝了杂质或阻塞物的形成,从根本上解决由于阻塞物与光纤刮碰,导致的产品质量问题。