
输电线路导线修补绕线装置、机器人及导线修补作业方法.pdf

是来****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
输电线路导线修补绕线装置、机器人及导线修补作业方法.pdf
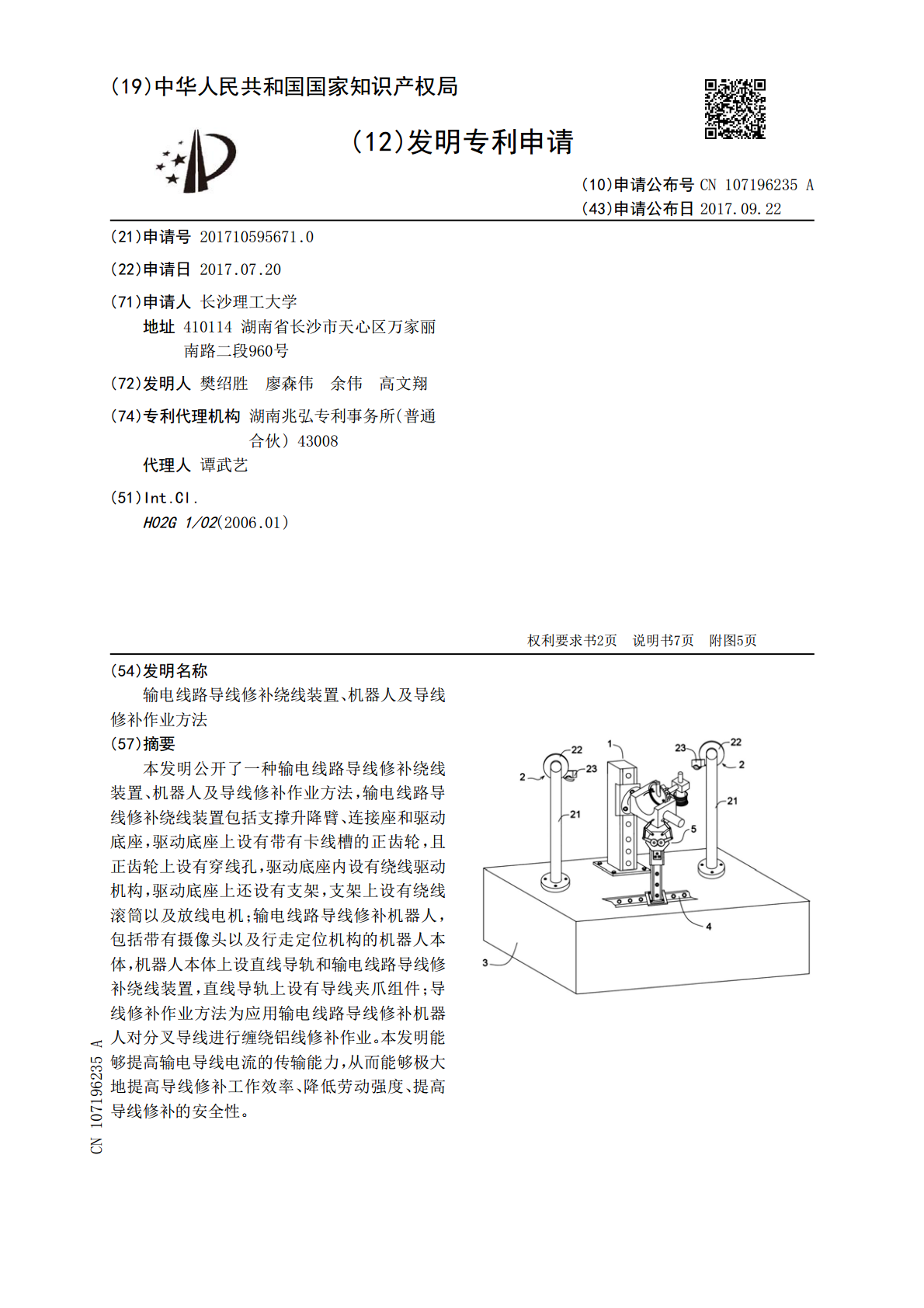
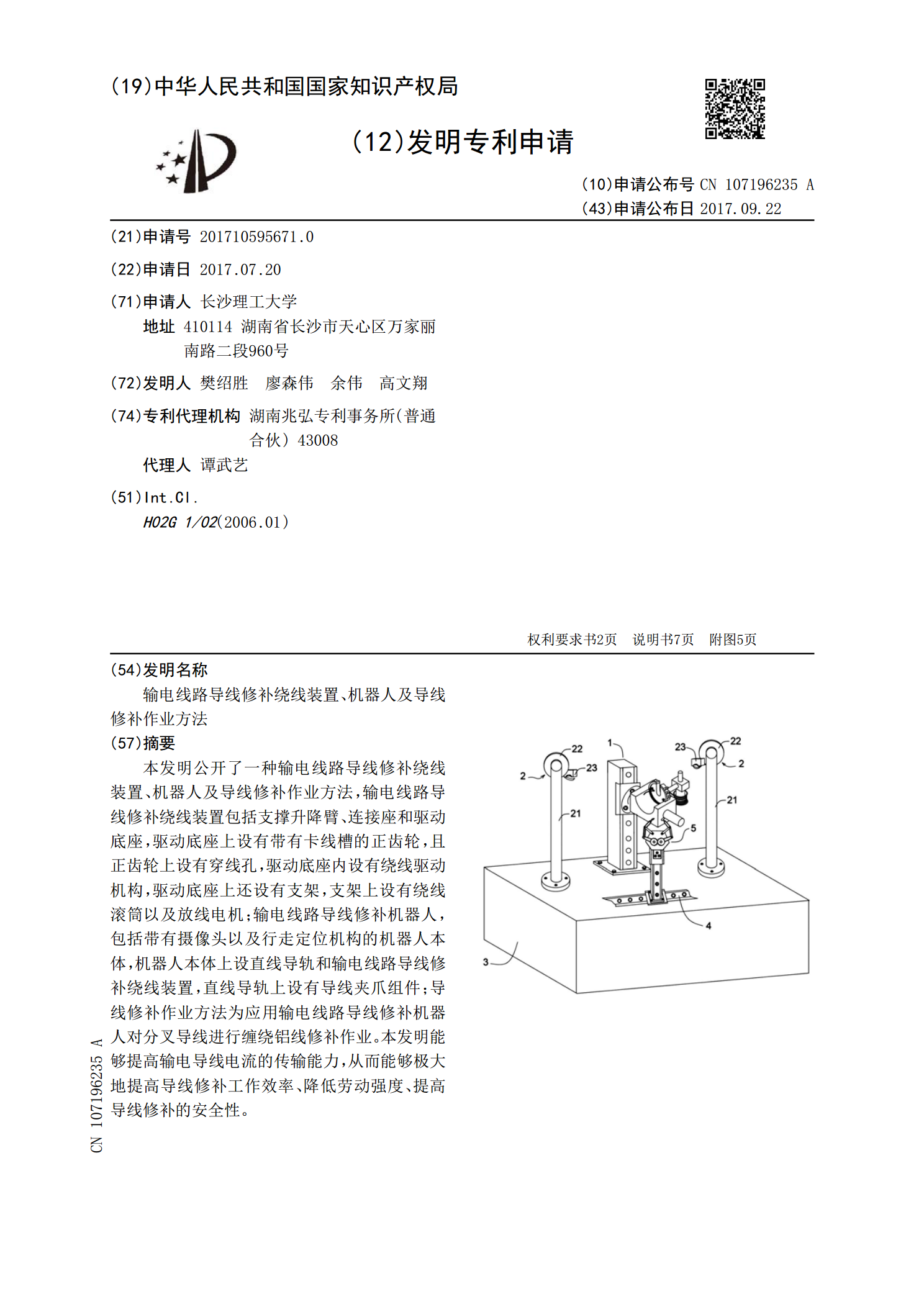
本发明公开了一种输电线路导线修补绕线装置、机器人及导线修补作业方法,输电线路导线修补绕线装置包括支撑升降臂、连接座和驱动底座,驱动底座上设有带有卡线槽的正齿轮,且正齿轮上设有穿线孔,驱动底座内设有绕线驱动机构,驱动底座上还设有支架,支架上设有绕线滚筒以及放线电机;输电线路导线修补机器人,包括带有摄像头以及行走定位机构的机器人本体,机器人本体上设直线导轨和输电线路导线修补绕线装置,直线导轨上设有导线夹爪组件;导线修补作业方法为应用输电线路导线修补机器人对分叉导线进行缠绕铝线修补作业。本发明能够提高输电导线电
一种用于修补输电线路导线的单丝绕线器及其使用方法.pdf
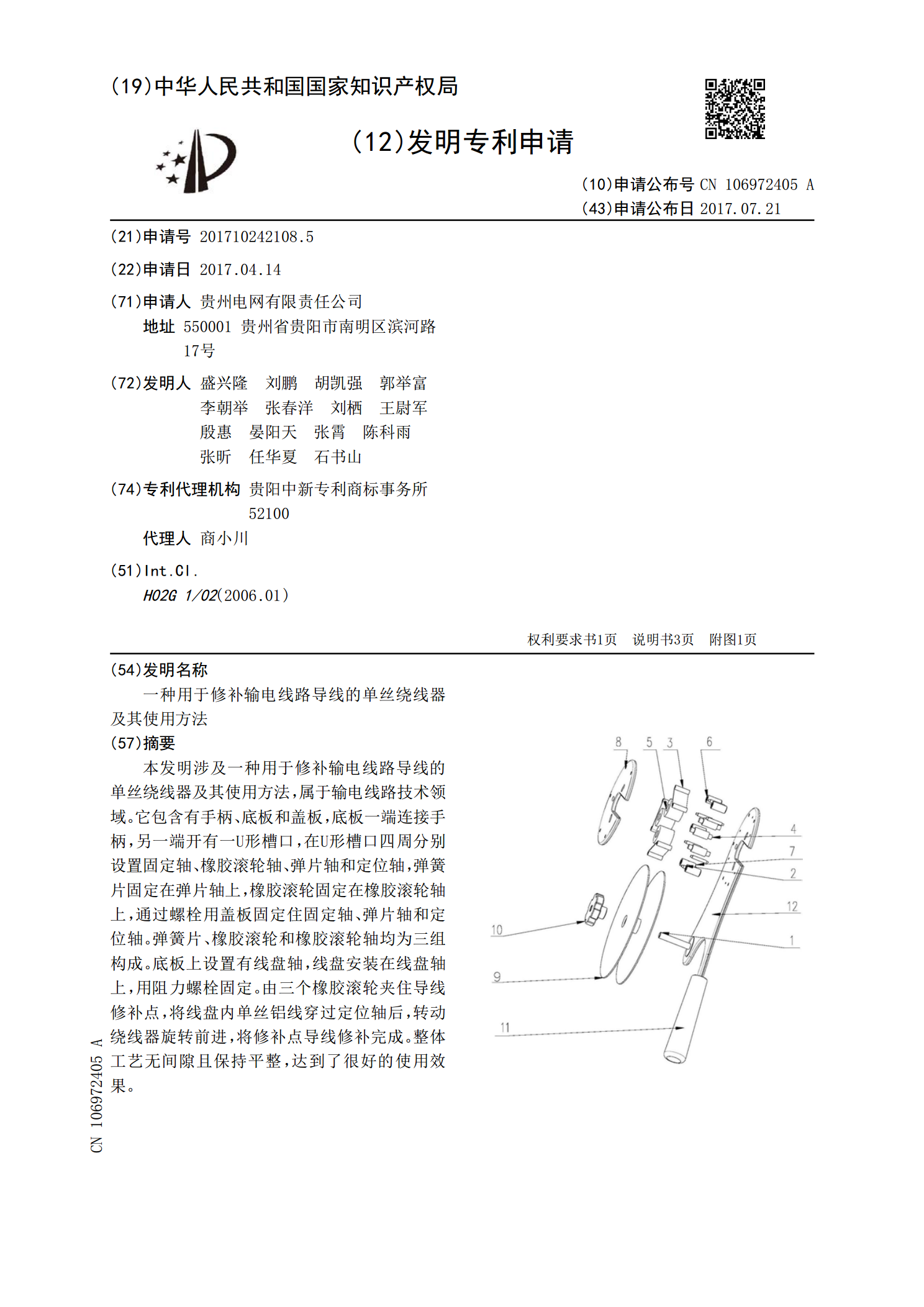
本发明涉及一种用于修补输电线路导线的单丝绕线器及其使用方法,属于输电线路技术领域。它包含有手柄、底板和盖板,底板一端连接手柄,另一端开有一U形槽口,在U形槽口四周分别设置固定轴、橡胶滚轮轴、弹片轴和定位轴,弹簧片固定在弹片轴上,橡胶滚轮固定在橡胶滚轮轴上,通过螺栓用盖板固定住固定轴、弹片轴和定位轴。弹簧片、橡胶滚轮和橡胶滚轮轴均为三组构成。底板上设置有线盘轴,线盘安装在线盘轴上,用阻力螺栓固定。由三个橡胶滚轮夹住导线修补点,将线盘内单丝铝线穿过定位轴后,转动绕线器旋转前进,将修补点导线修补完成。整体工艺无
一种电力线路导线修补装置及方法.pdf
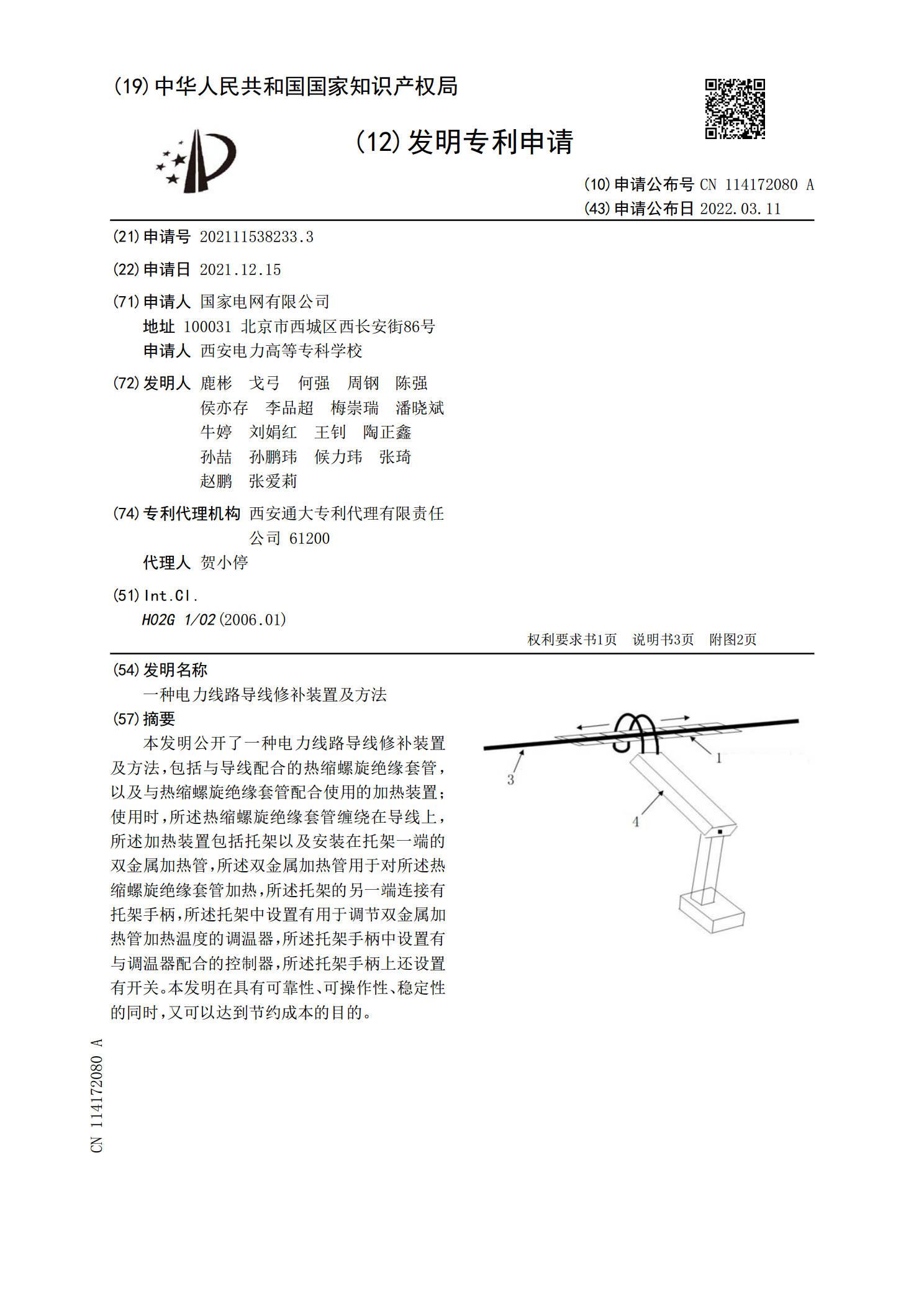
本发明公开了一种电力线路导线修补装置及方法,包括与导线配合的热缩螺旋绝缘套管,以及与热缩螺旋绝缘套管配合使用的加热装置;使用时,所述热缩螺旋绝缘套管缠绕在导线上,所述加热装置包括托架以及安装在托架一端的双金属加热管,所述双金属加热管用于对所述热缩螺旋绝缘套管加热,所述托架的另一端连接有托架手柄,所述托架中设置有用于调节双金属加热管加热温度的调温器,所述托架手柄中设置有与调温器配合的控制器,所述托架手柄上还设置有开关。本发明在具有可靠性、可操作性、稳定性的同时,又可以达到节约成本的目的。
一种架空导线修补装置及其修补方法.pdf
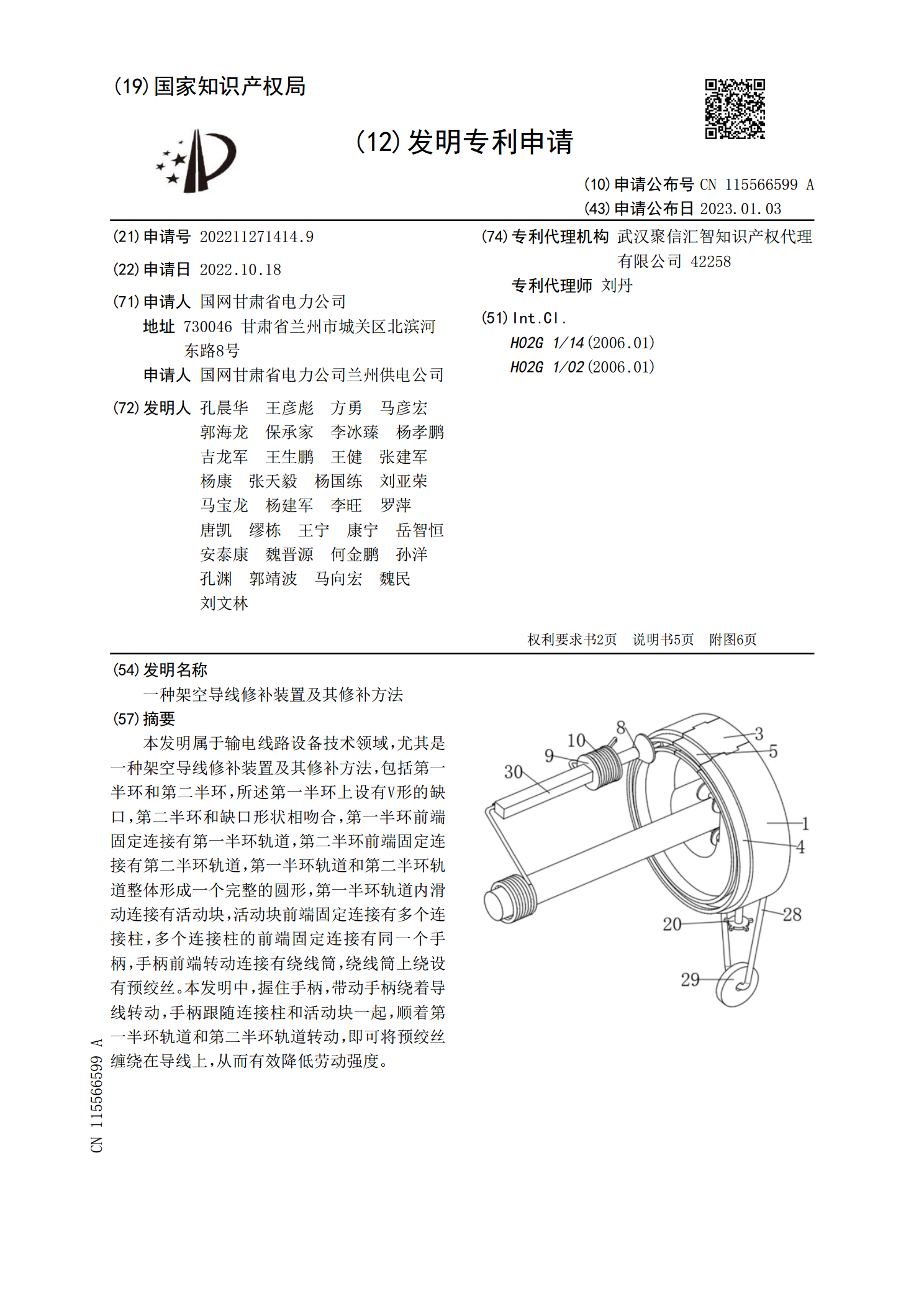
本发明属于输电线路设备技术领域,尤其是一种架空导线修补装置及其修补方法,包括第一半环和第二半环,所述第一半环上设有V形的缺口,第二半环和缺口形状相吻合,第一半环前端固定连接有第一半环轨道,第二半环前端固定连接有第二半环轨道,第一半环轨道和第二半环轨道整体形成一个完整的圆形,第一半环轨道内滑动连接有活动块,活动块前端固定连接有多个连接柱,多个连接柱的前端固定连接有同一个手柄,手柄前端转动连接有绕线筒,绕线筒上绕设有预绞丝。本发明中,握住手柄,带动手柄绕着导线转动,手柄跟随连接柱和活动块一起,顺着第一半环轨道

架空配电线路导线修补.pptx
10kV及以下架空配电线路导线修补一、质量控制1.导线损伤处理(1)导线损伤截面或断股不超过下列范围可采用预绞丝修补条或敷线修补。1)断股损伤截面不超过铝股总截面7%即7股绞线断1股;2)断股损伤截面不超过铝股总截面7%即19股绞线断3股;3)断股损伤截面不超过铝股总截面7%即37股绞线断6股;4)对临时敷线修补应做好缺陷记录。(2)导线损伤截面或断股超过下列范围可采用预绞式修补条修补,超出此范围或出现金沟、破股等已形成无法修复的永久变形或钢芯铝绞线钢芯断1股,应剪断重接。1)断股损伤截面占铝股总面积7%