
两轮循迹智能车.pdf

St****12

1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

两轮循迹智能车.pdf
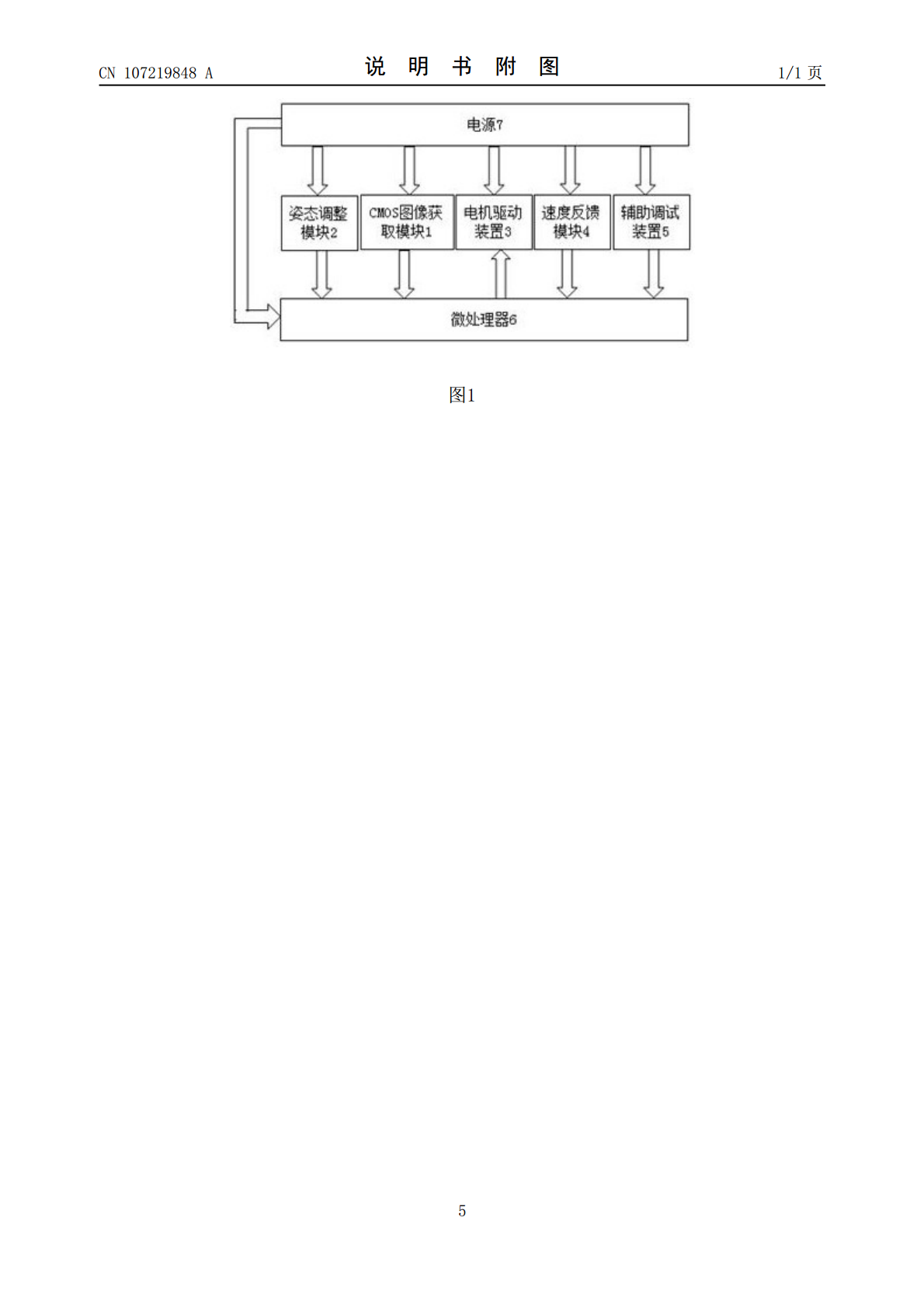
本发明提供了一种两轮循迹智能车,包括CMOS图像获取模块、姿态调整模块、电机驱动装置、速度反馈模块、辅助调试装置、微控制器和电源;微控制器对车体的姿态进行信息采集并转换,同时进行CMOS图像获取模块获取的图像传输以提供微控制器的道路识别和决策;通过姿态调整模块开启电机驱动装置驱动电机,实现智能车的姿态保持和转向;速度反馈模块则将当前速度反馈给微控制器实现速度闭环,使得智能车平稳进行。

智能车循迹规划研究.pptx
智能车循迹规划研究目录智能车循迹规划概述智能车循迹规划的定义智能车循迹规划的目标智能车循迹规划的应用场景智能车循迹规划算法算法分类与比较算法实现流程算法优化方法智能车循迹规划硬件实现硬件架构设计传感器选型与配置硬件集成与调试智能车循迹规划实验与验证实验场景设计实验数据采集与分析实验结果评估与改进智能车循迹规划未来发展技术发展趋势应用领域拓展未来挑战与机遇THANKYOU

智能循迹车硬件电路设计与优化.docx
智能循迹车硬件电路设计与优化智能循迹车硬件电路设计与优化摘要:智能循迹车作为一种能够根据预设路径自主驾驶的车辆,已经在各个领域得到了广泛应用。本文主要介绍了智能循迹车的硬件电路设计与优化方法。首先,对智能循迹车的基本结构和原理进行了简要介绍;接着,分析了智能循迹车的关键硬件模块,包括传感器、执行器和控制器;然后,详细讨论了智能循迹车硬件电路设计的各个环节,包括传感器电路、电源电路、控制电路等,并提出了相应的优化措施;最后,通过实验验证了优化后的电路设计的有效性和性能提升。关键词:智能循迹车、硬件电路、优化

基于特征提取的分离循迹智能车系统.docx
基于特征提取的分离循迹智能车系统基于特征提取的分离循迹智能车系统摘要:智能车技术的快速发展已经成为了智能交通领域的研究热点。分离循迹是智能车系统中的关键技术之一,它能够使智能车在复杂的道路环境中准确地跟踪道路轨迹。本文提出了一种基于特征提取的分离循迹智能车系统,通过从图像中提取相关特征,实现车辆的轨迹追踪。引言:随着城市化进程的加快,道路交通拥堵问题越发严重,交通事故也频繁发生。为了解决这些问题,智能车技术应运而生。分离循迹作为智能车系统的核心技术之一,对于车辆的自动驾驶具有重要意义。而基于特征提取的分离

基于激光传感器的智能车循迹系统.doc
河北大学工商学院装订线本科生毕业论文(设计)题目:基于激光传感器旳智能车循迹系统学部信息科学与工程学部学科门类工学专业电气工程及自动化学号姓名指引教师5月16日基于激光传感器旳智能车循迹系统摘要智能汽车是将来汽车发展旳趋势,它体现了自动控制、人工智能、传感技术、机械技术、计算机技术等多种学科领域理论技术旳交叉和综合。本文简介了基于激光传感器旳智能车循迹系统旳设计过程及重要旳控制算法。智能车控制系统旳基本规定是在稳定性旳基础上使其获得较快旳速度。而智能车系统旳方向控制及速度控制旳配合控制是一种至关重要旳因素