
手术机器人的手术器械和手术机器人.pdf

闪闪****魔王


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手术机器人的手术器械和手术机器人.pdf
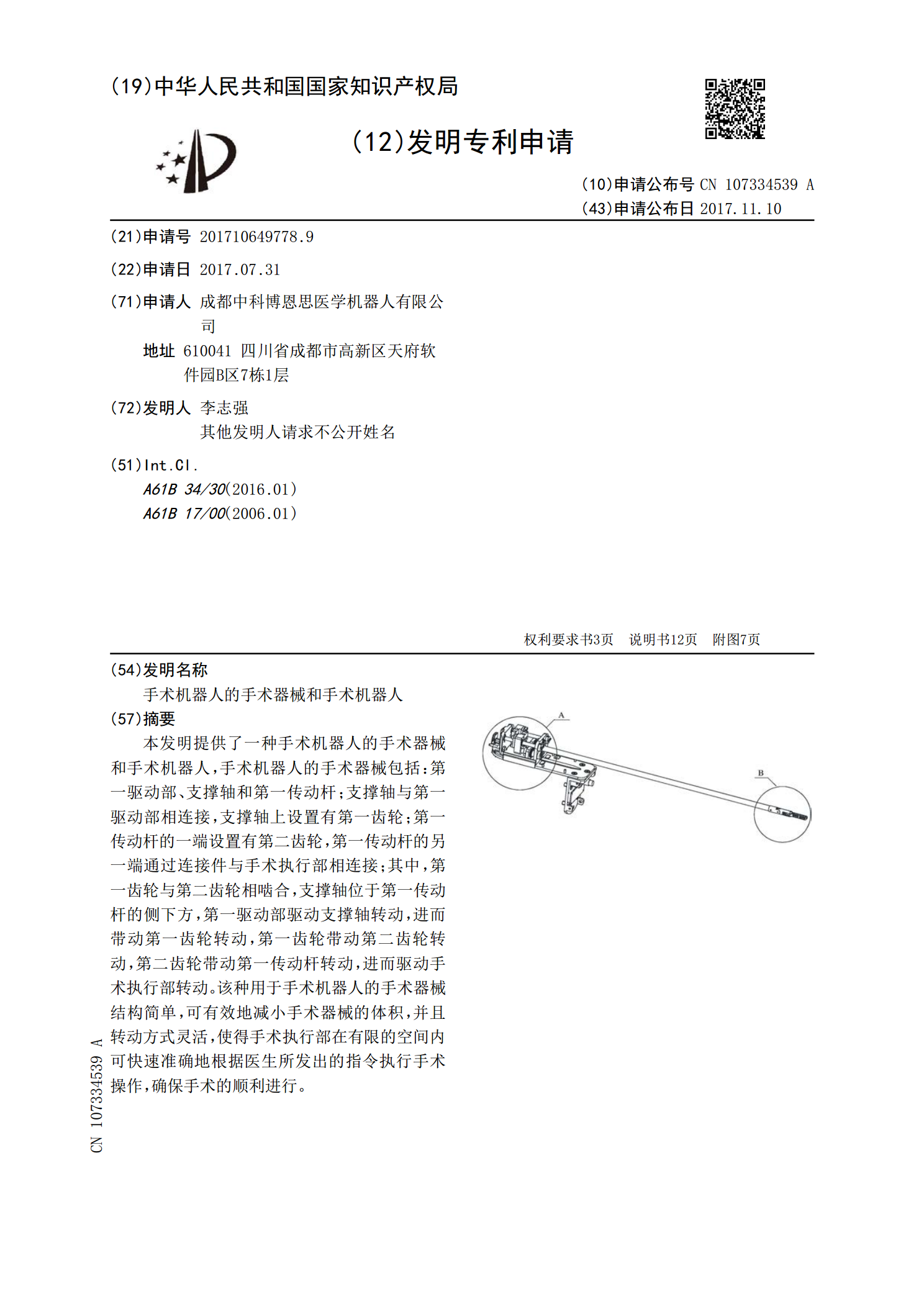
本发明提供了一种手术机器人的手术器械和手术机器人,手术机器人的手术器械包括:第一驱动部、支撑轴和第一传动杆;支撑轴与第一驱动部相连接,支撑轴上设置有第一齿轮;第一传动杆的一端设置有第二齿轮,第一传动杆的另一端通过连接件与手术执行部相连接;其中,第一齿轮与第二齿轮相啮合,支撑轴位于第一传动杆的侧下方,第一驱动部驱动支撑轴转动,进而带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮带动第一传动杆转动,进而驱动手术执行部转动。该种用于手术机器人的手术器械结构简单,可有效地减小手术器械的体积,并且转动方式灵活,
手术机器人的手术器械和手术机器人.pdf
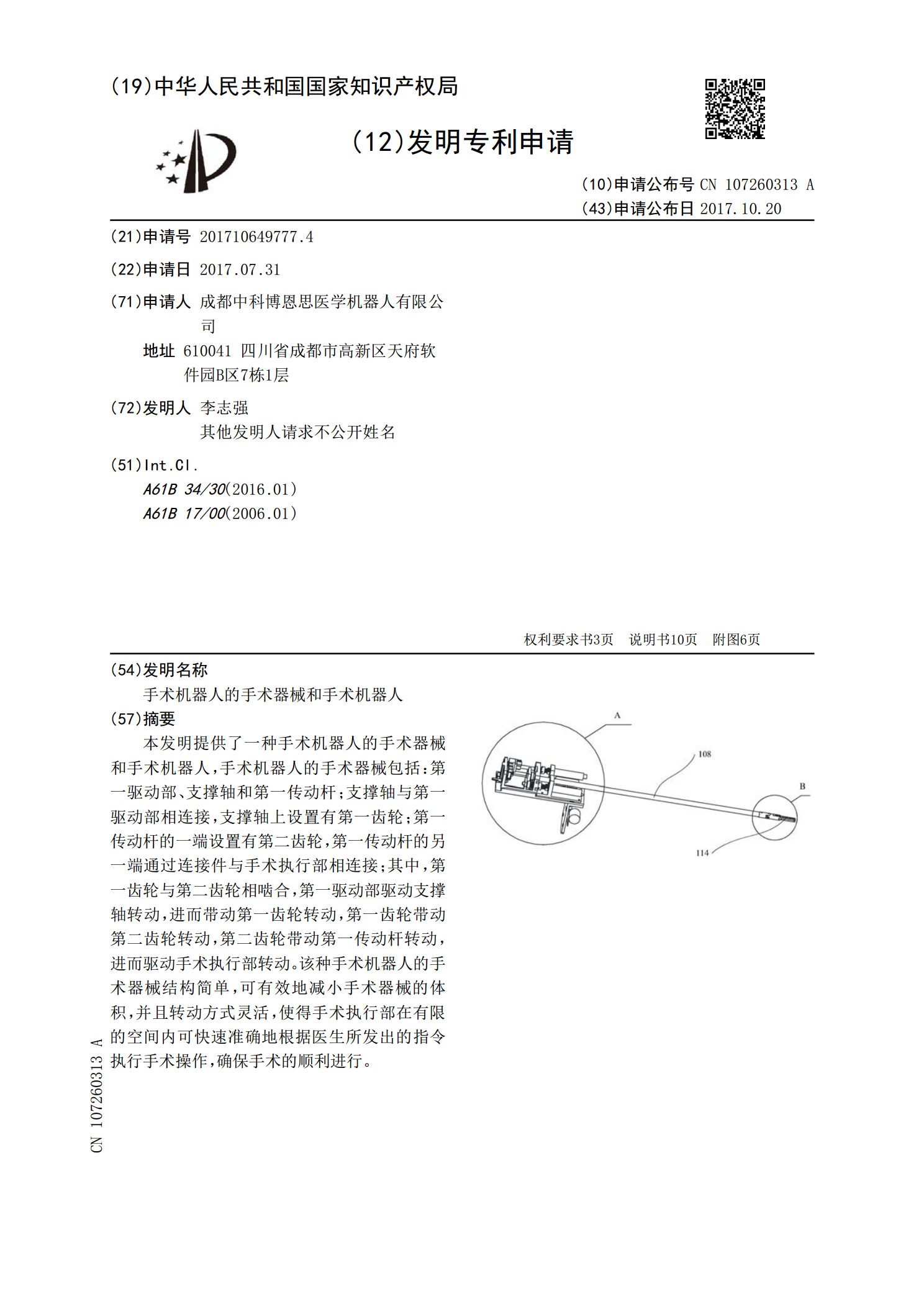
本发明提供了一种手术机器人的手术器械和手术机器人,手术机器人的手术器械包括:第一驱动部、支撑轴和第一传动杆;支撑轴与第一驱动部相连接,支撑轴上设置有第一齿轮;第一传动杆的一端设置有第二齿轮,第一传动杆的另一端通过连接件与手术执行部相连接;其中,第一齿轮与第二齿轮相啮合,第一驱动部驱动支撑轴转动,进而带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮带动第一传动杆转动,进而驱动手术执行部转动。该种手术机器人的手术器械结构简单,可有效地减小手术器械的体积,并且转动方式灵活,使得手术执行部在有限的空间内可快速

手术机器人的手术器械和手术机器人.pdf
本发明提供了一种手术机器人的手术器械和手术机器人,手术机器人的手术器械包括:第一驱动部、支撑轴和第一传动杆;支撑轴与第一驱动部相连接,支撑轴上设置有第一齿轮;第一传动杆的一端设置有第二齿轮,第一传动杆的另一端通过连接件与手术执行部相连接;其中,第一齿轮与第二齿轮相啮合,支撑轴位于第一传动杆的侧上方,第一驱动部驱动支撑轴转动,进而带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮带动第一传动杆转动,进而驱动手术执行部转动。该种用于手术机器人的手术器械结构简单,可有效地减小手术器械的体积,并且转动方式灵活,
手术机器人及手术器械.pdf
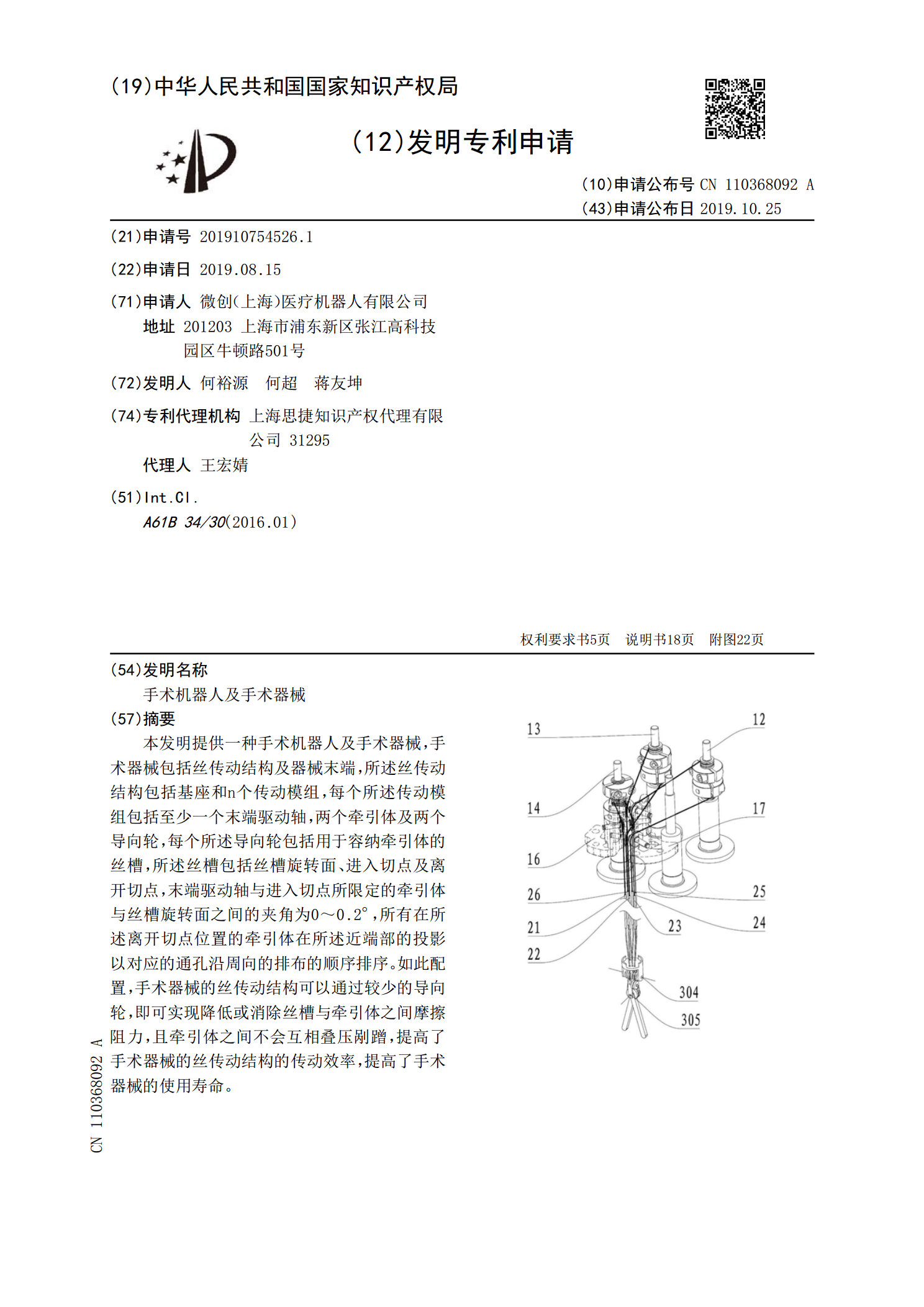
本发明提供一种手术机器人及手术器械,手术器械包括丝传动结构及器械末端,所述丝传动结构包括基座和n个传动模组,每个所述传动模组包括至少一个末端驱动轴,两个牵引体及两个导向轮,每个所述导向轮包括用于容纳牵引体的丝槽,所述丝槽包括丝槽旋转面、进入切点及离开切点,末端驱动轴与进入切点所限定的牵引体与丝槽旋转面之间的夹角为0~0.2°,所有在所述离开切点位置的牵引体在所述近端部的投影以对应的通孔沿周向的排布的顺序排序。如此配置,手术器械的丝传动结构可以通过较少的导向轮,即可实现降低或消除丝槽与牵引体之间摩擦阻力,且
手术机器人、手术器械和力传递装置.pdf
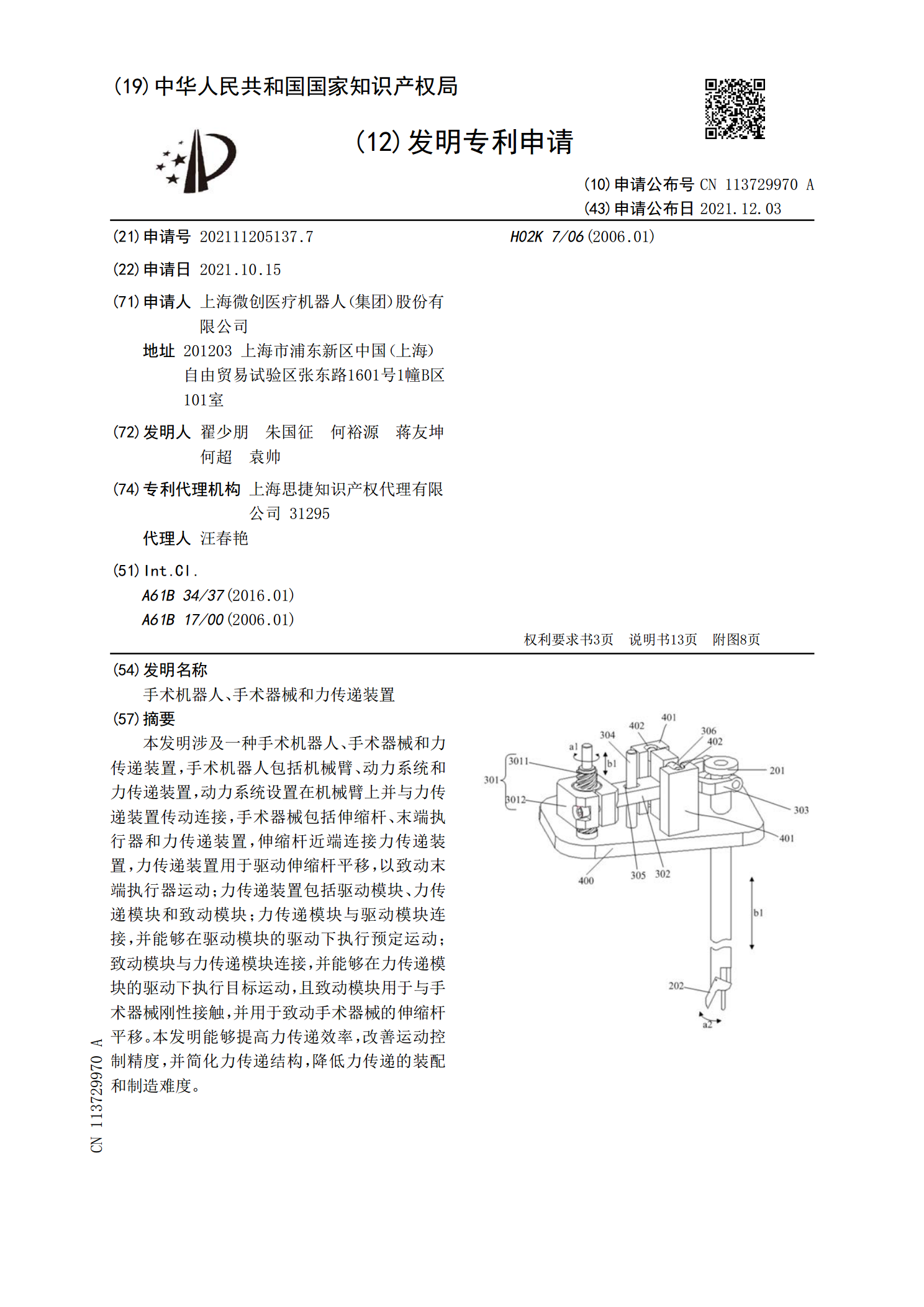
本发明涉及一种手术机器人、手术器械和力传递装置,手术机器人包括机械臂、动力系统和力传递装置,动力系统设置在机械臂上并与力传递装置传动连接,手术器械包括伸缩杆、末端执行器和力传递装置,伸缩杆近端连接力传递装置,力传递装置用于驱动伸缩杆平移,以致动末端执行器运动;力传递装置包括驱动模块、力传递模块和致动模块;力传递模块与驱动模块连接,并能够在驱动模块的驱动下执行预定运动;致动模块与力传递模块连接,并能够在力传递模块的驱动下执行目标运动,且致动模块用于与手术器械刚性接触,并用于致动手术器械的伸缩杆平移。本发明能