
一种育秧机自动纠偏系统、方法及育秧机.pdf

飞飙****ng

1/8
2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种育秧机自动纠偏系统、方法及育秧机.pdf
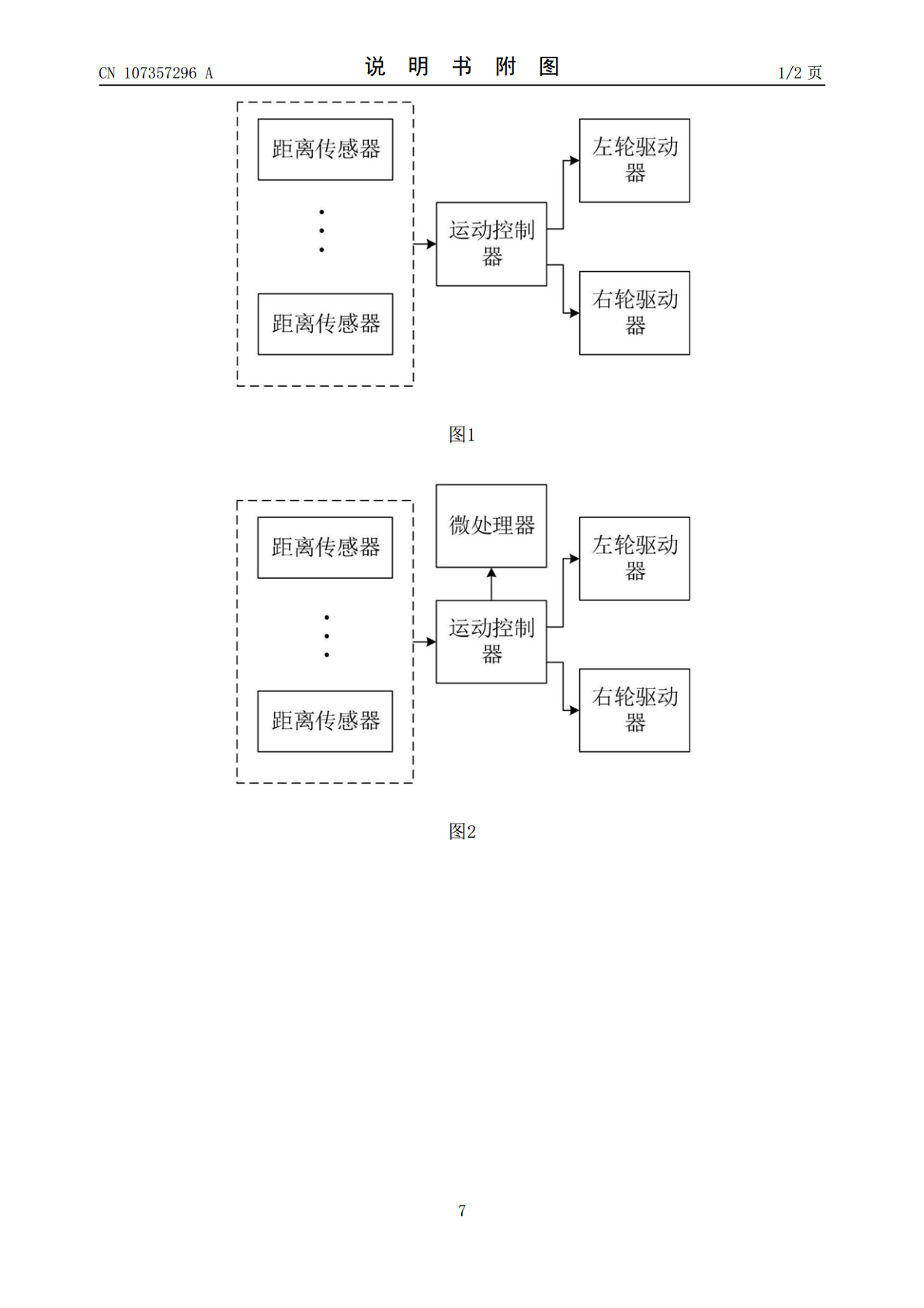
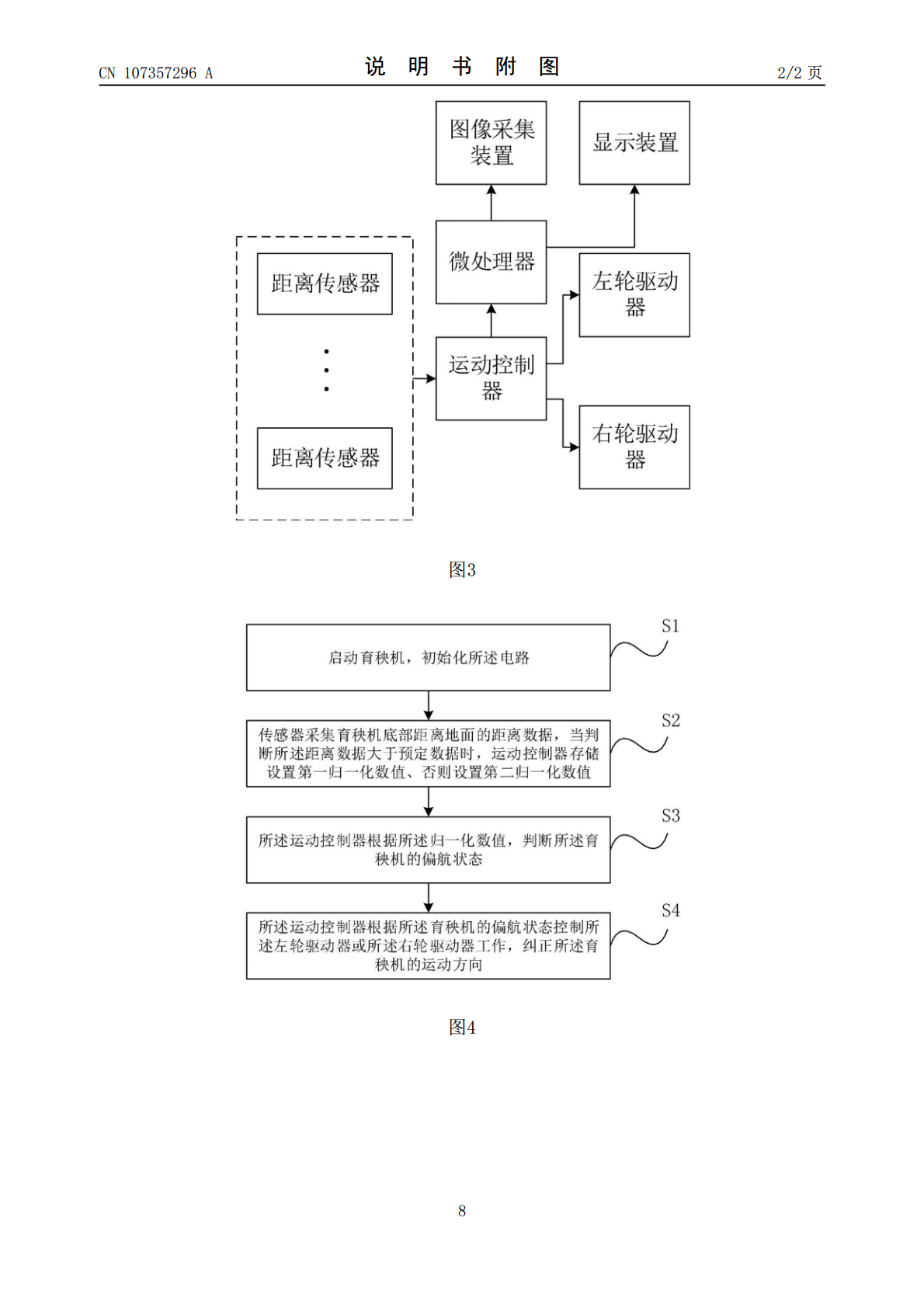
本发明公开了一种育秧机自动纠偏系统,包括:至少三个距离传感器、运动控制器、左轮驱动器、右轮驱动器;所述距离传感器连接所述运动控制器,其依次设置在所述育秧机底部的两边及中间位置,用于检测所述育秧机底部距离地面的距离,将所述距离数据发送到所述运动控制器;所述运动控制器连接所述第一驱动器、所述第二驱动器,用根据所述距离数据得到育秧机偏航状态,控制所述左轮驱动器或所述右轮驱动器工作,改变所述育秧机的运动方向;其中,所述左轮驱动器连接所述育秧机左轮,所述右轮驱动器连接所述育秧机右轮。本发明的控制电路自动化程度高、能
一种具有纠偏功能的育秧机.pdf
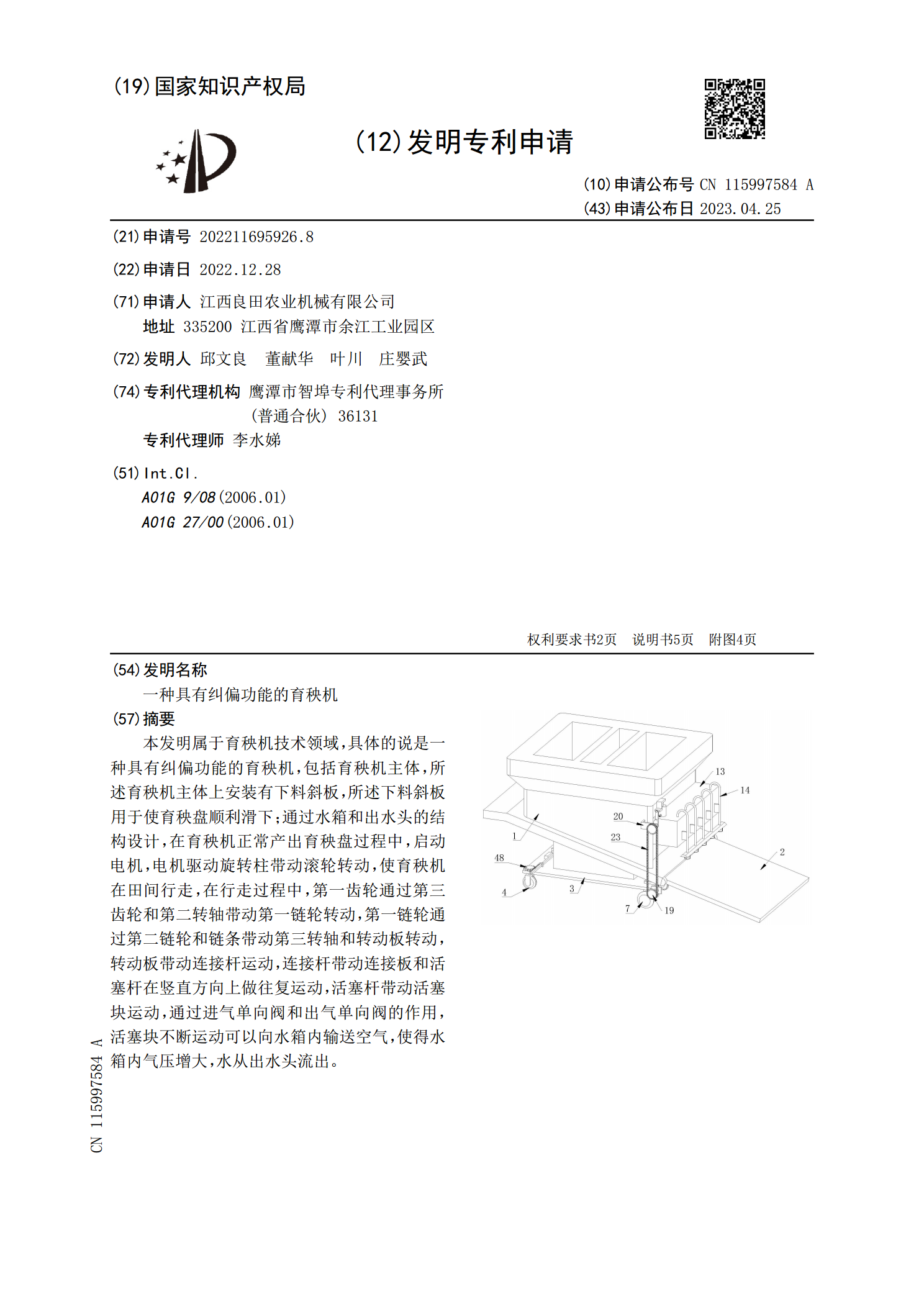
本发明属于育秧机技术领域,具体的说是一种具有纠偏功能的育秧机,包括育秧机主体,所述育秧机主体上安装有下料斜板,所述下料斜板用于使育秧盘顺利滑下;通过水箱和出水头的结构设计,在育秧机正常产出育秧盘过程中,启动电机,电机驱动旋转柱带动滚轮转动,使育秧机在田间行走,在行走过程中,第一齿轮通过第三齿轮和第二转轴带动第一链轮转动,第一链轮通过第二链轮和链条带动第三转轴和转动板转动,转动板带动连接杆运动,连接杆带动连接板和活塞杆在竖直方向上做往复运动,活塞杆带动活塞块运动,通过进气单向阀和出气单向阀的作用,活塞块不断
一种自动转弯水稻育秧机.pdf
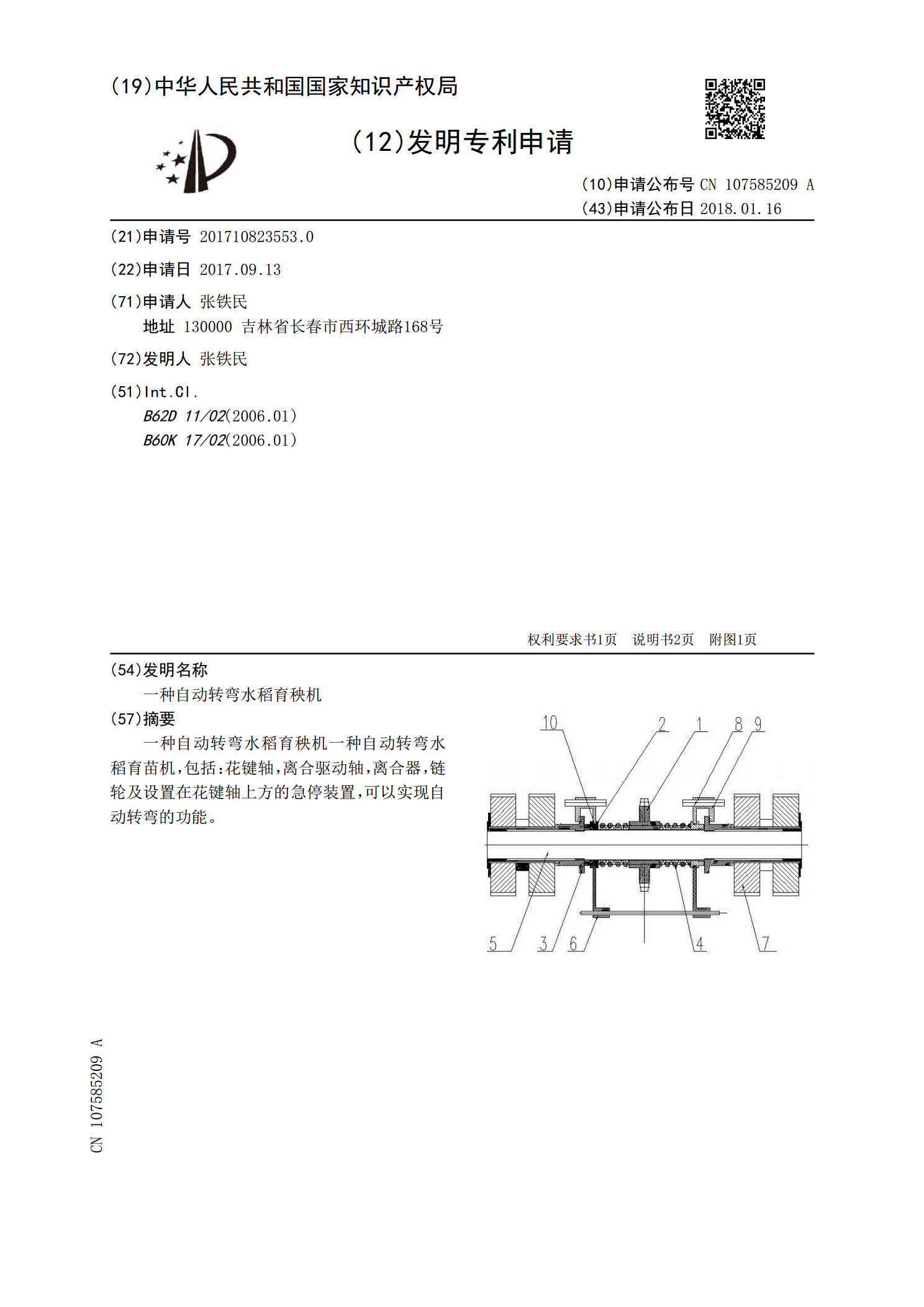
一种自动转弯水稻育秧机一种自动转弯水稻育苗机,包括:花键轴,离合驱动轴,离合器,链轮及设置在花键轴上方的急停装置,可以实现自动转弯的功能。

改进型机插育秧硬盘及防止机插育秧硬盘下陷的方法.pdf
本发明涉及一种改进型机插育秧硬盘及防止机插育秧硬盘下陷的方法,是针对解决现有同类产品配合播种机在田间使用时易下陷,导致播种机行走不便的技术问题而设计。该改进型机插育秧硬盘的主体为矩形塑料盘,矩形塑料盘由矩形框和底盘构成,其设计要点在于矩形框一侧的短边框设有凸出的榫头,矩形框另一侧的短边框设有与榫头形状匹配的套孔,当一块矩形塑料盘的榫头与另一块矩形塑料盘的套孔配合时,该两块矩形塑料硬盘连为一体,且矩形框框面齐平。基于上述结构,播种机采用铝合金支架,仅设置前、后两组滚轮组件即可实现田间机插育秧操作。本发明结构

一种机插水稻育秧方法及其应用.pdf
本发明提供一种机插水稻育秧方法,涉及农业技术领域中的水稻育秧技术。该方法包括育秧基质准备、种子处理及催芽、播种、网室中育秧等步骤。本发明的有益效果:所制备的育秧基质理化性状好,营养全面,养分含量充足,容重较小,孔隙度大,pH值为弱酸性,电导率适中。使用该方法培育出来的秧苗健壮,茎基粗、叶龄,SPAD值、叶面积、地上部干重,发根能力、根系盘结力等都优于现有技术培育出来的秧苗。该育秧方法有利于机插水稻生长发育及产量的提高,尤其适合双季稻机械化育秧,可作为工厂化育秧方法,稻谷种子出苗扎根快,成苗率高,病虫害明显