
一种两轮自平衡机器人自适应滑模变结构控制系统.pdf

依波****bc


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种两轮自平衡机器人自适应滑模变结构控制系统.pdf
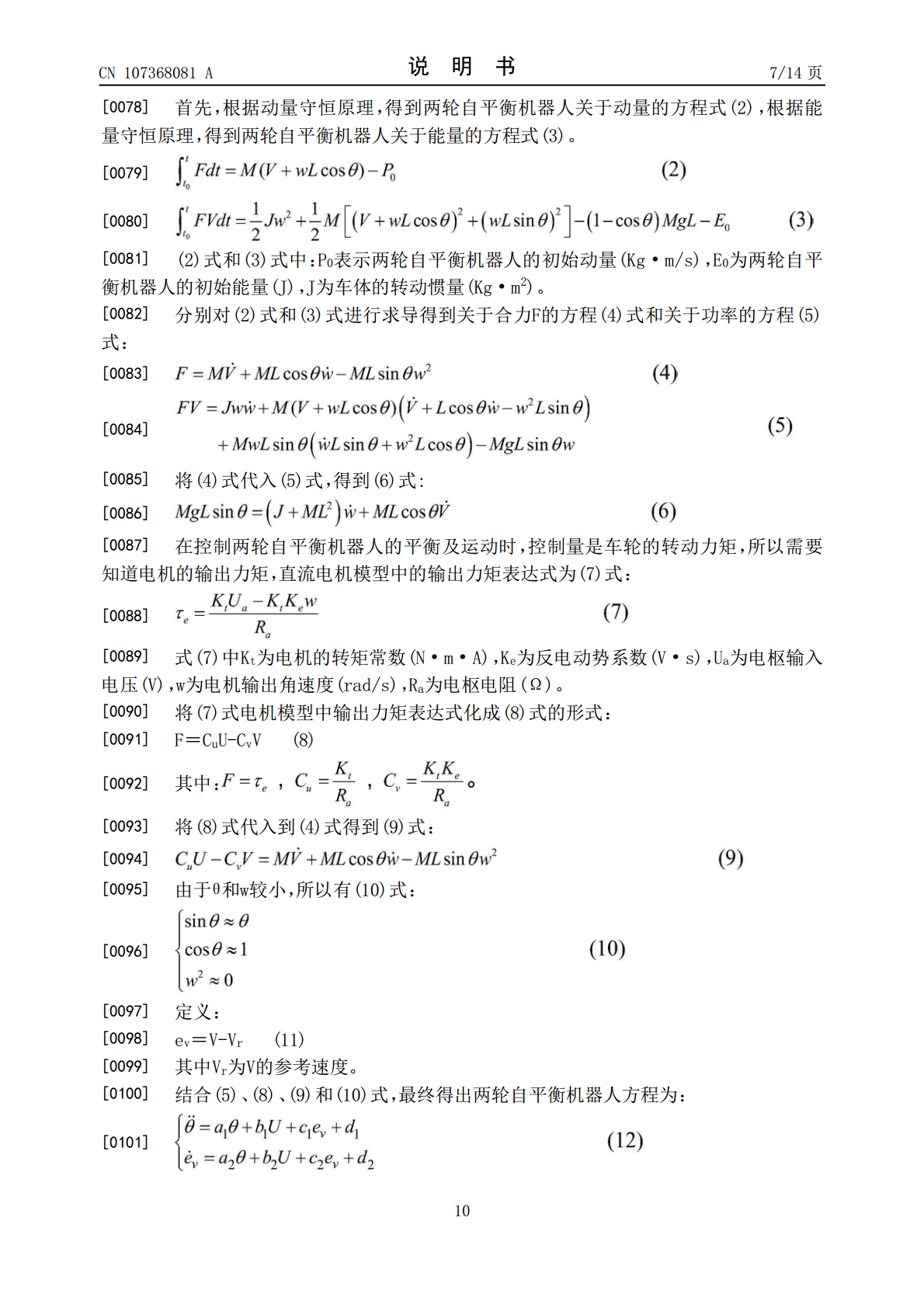
本发明公开了一种两轮自平衡机器人自适应滑模变结构控制系统,根据经典力学分析法和基于能量分析的Lagrange算法建模如下两轮自平衡机器人的动力学方程并根据该动力学方程设计出滑模变结构控制器;滑模变结构控制器包括速度滑模变结构控制器和角度滑模变结构控制器,速度滑模变结构控制器和角度滑模变结构控制器相互反馈,其反馈方程为:θ

一种两轮自平衡机器人自适应滑模变结构控制方法及系统.pdf
本发明公开了一种两轮自平衡机器人自适应滑模变结构控制方法及系统,根据经典力学分析法和基于能量分析的Lagrange算法建模如下两轮自平衡机器人的动力学方程并根据该动力学方程设计出滑模变结构控制器;滑模变结构控制器包括速度滑模变结构控制器和角度滑模变结构控制器,速度滑模变结构控制器和角度滑模变结构控制器相互反馈,其反馈方程为:θ
一种两轮自平衡机器人滑模自适应控制系统.pdf
本发明公开了一种两轮自平衡机器人滑模自适应控制系统,包括传感器测量模块、主控芯片和电机系统,其中,传感器测量模块用于采集自平衡机器人运动参数,电机系统用于驱动两轮自平衡机器人运动;主控芯片与传感器测量模块和电机系统相连接,用于根据传感器测量模块采集的运动参数控制电机系统的运动;主控芯片中设置滑模自适应控制器,滑模自适应控制器的输出方程为:U=‑(K+φ)X。采用本发明的技术方案,能够对外界环境进行自适应同时能够最大程度降低外界环境中各种干扰对两轮自平衡机器人的影响并且不损失鲁棒性,同时本发明还会利用机器学

滑模变结构方法在两轮自平衡机器人上的应用.docx
滑模变结构方法在两轮自平衡机器人上的应用滑模变结构控制方法是一种广泛应用于机电系统控制中的一种控制方法。它通过将系统模型进行离散化,并构建一个切换控制器来实现控制系统的快速响应和鲁棒性。在自平衡机器人领域,滑模变结构控制方法已经得到了广泛的应用,并且已经证明了其良好的控制性能。自平衡机器人是一种通过智能控制技术控制机器人实现自主平衡的智能机器人系统。自平衡机器人主要由两个机轮、控制系统和传感器组成。它的主要控制思想是通过控制机轮速度和机身重心位置的协同运动,使得机器人能够保持垂直状态并实现平衡。在这个控制

一种两轮自平衡机器人滑模自适应控制方法.pdf
本发明公开了一种两轮自平衡机器人滑模自适应控制方法,包括以下步骤:通过传感器测量模块采集自平衡机器人运动参数;在主控芯片中设置滑模自适应控制器,该滑模自适应控制器根据实时输入的角度参量θ和角速度