
一种矫直机.pdf

文宣****66

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种矫直机.pdf
本发明提供了一种矫直机,包括上料机构、导向机构、矫直机构和下料机构,所述上料机构包括气缸,所述导向机构设置在所述上料机构和所述矫直机构的中间,所述下料机构设置在所述矫直机构的远离所述导向机构的另一端,所述气缸设置在所述上料机构的远离所述导向机构的一端,所述调节装置设置在所述矫直机构的顶端,所述辊设置在所述矫直机构的中间,所述电机设置在所述矫直机构机身内部,所述挡板设置在所述下料机构的两侧,所述滚轮设置在所述下料机构的所述机架台面,所述底架一侧和所述机架连接,所述底架两侧设有所述护板。本发明所述的优点和有益
一种矫直机.pdf
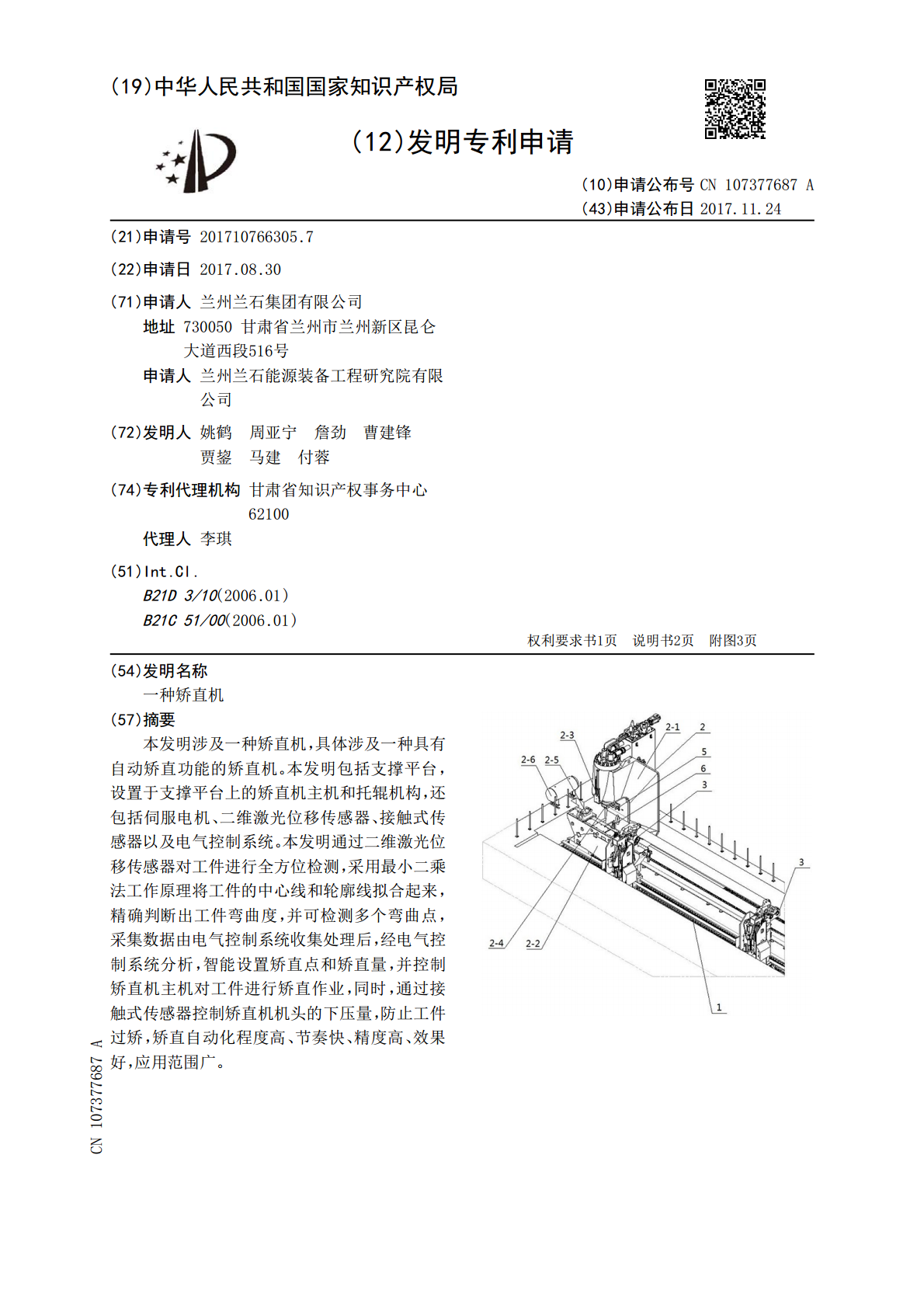
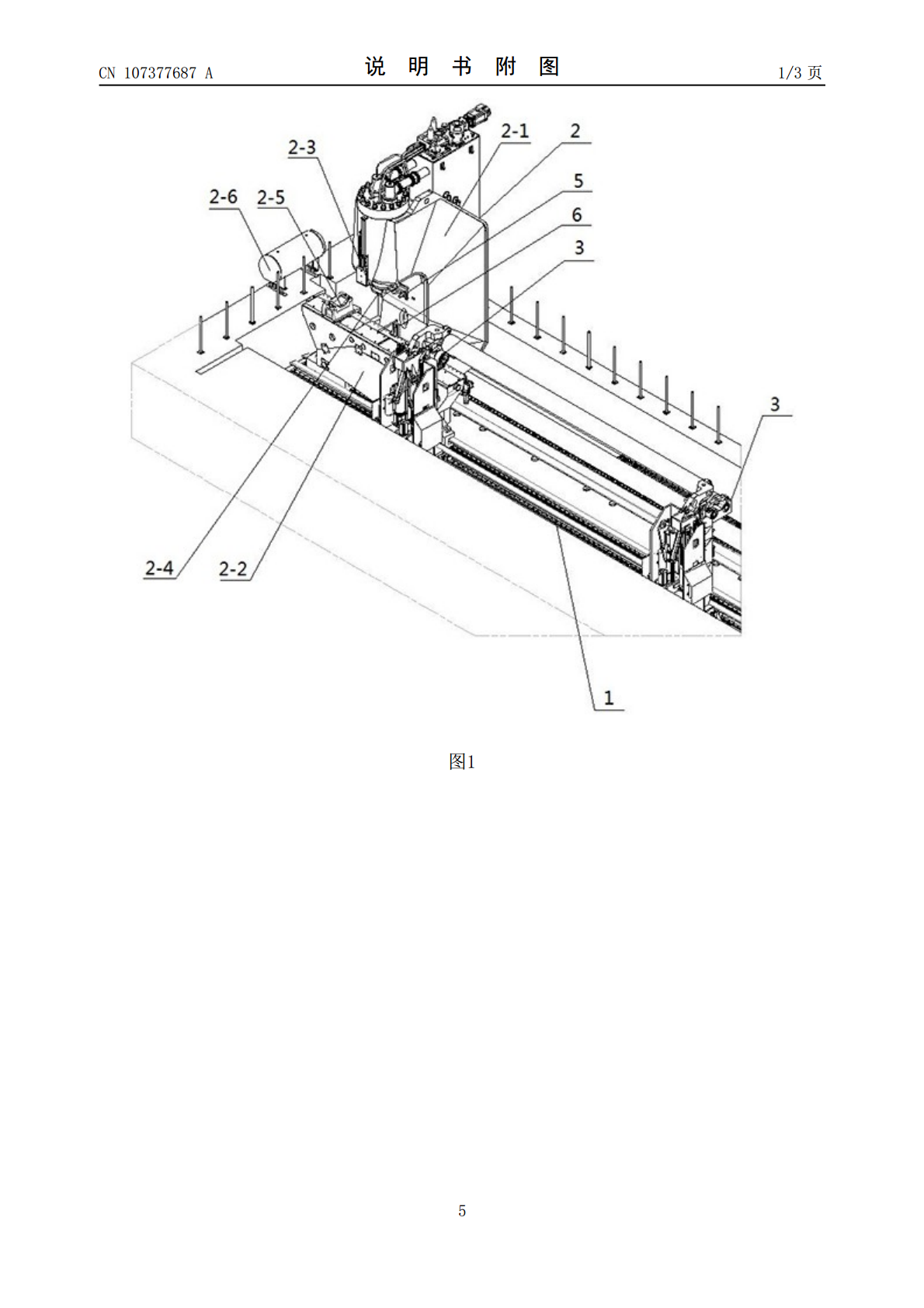
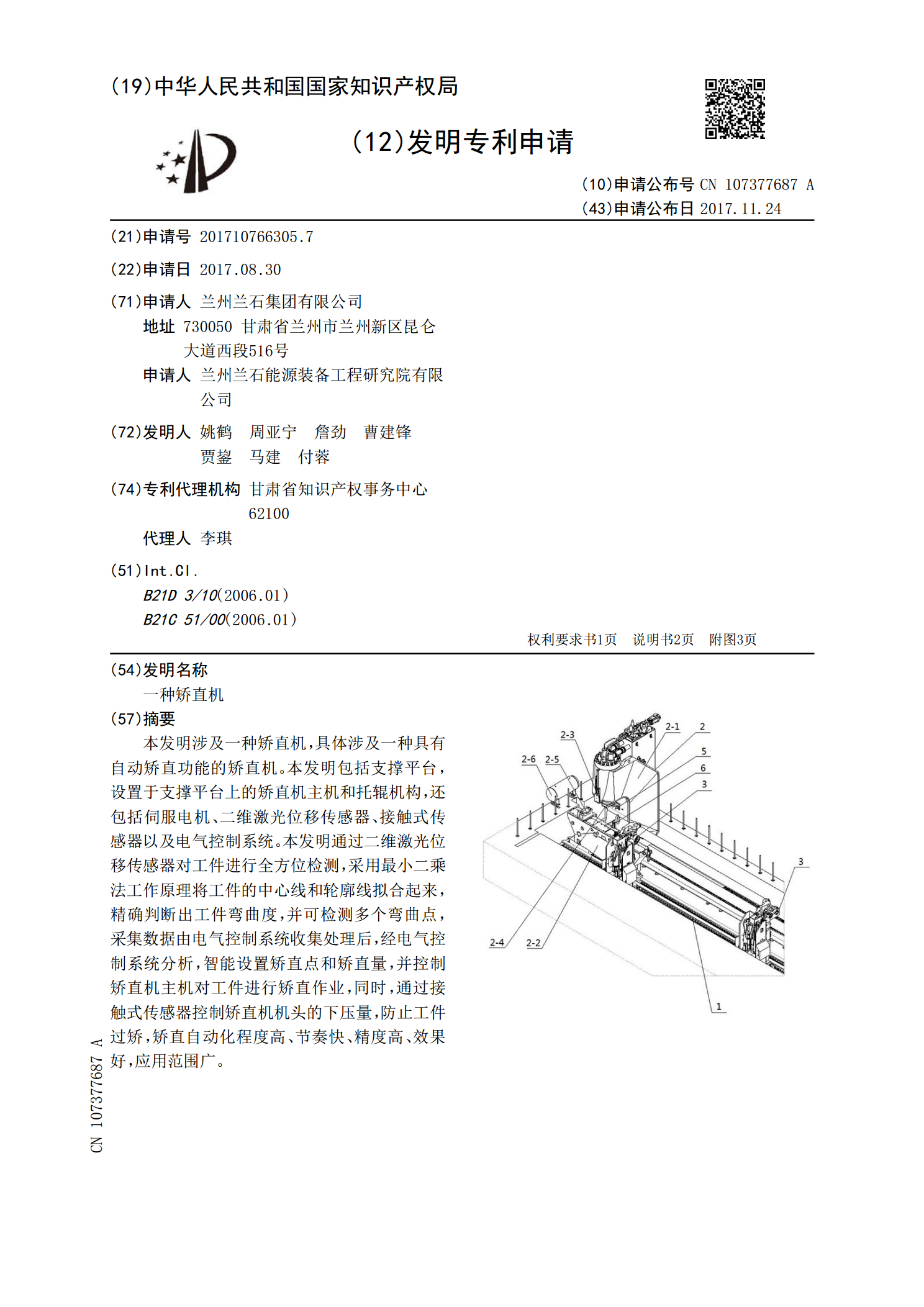
本发明涉及一种矫直机,具体涉及一种具有自动矫直功能的矫直机。本发明包括支撑平台,设置于支撑平台上的矫直机主机和托辊机构,还包括伺服电机、二维激光位移传感器、接触式传感器以及电气控制系统。本发明通过二维激光位移传感器对工件进行全方位检测,采用最小二乘法工作原理将工件的中心线和轮廓线拟合起来,精确判断出工件弯曲度,并可检测多个弯曲点,采集数据由电气控制系统收集处理后,经电气控制系统分析,智能设置矫直点和矫直量,并控制矫直机主机对工件进行矫直作业,同时,通过接触式传感器控制矫直机机头的下压量,防止工件过矫,矫直
一种无缝钢管用矫直机的矫直机构.pdf
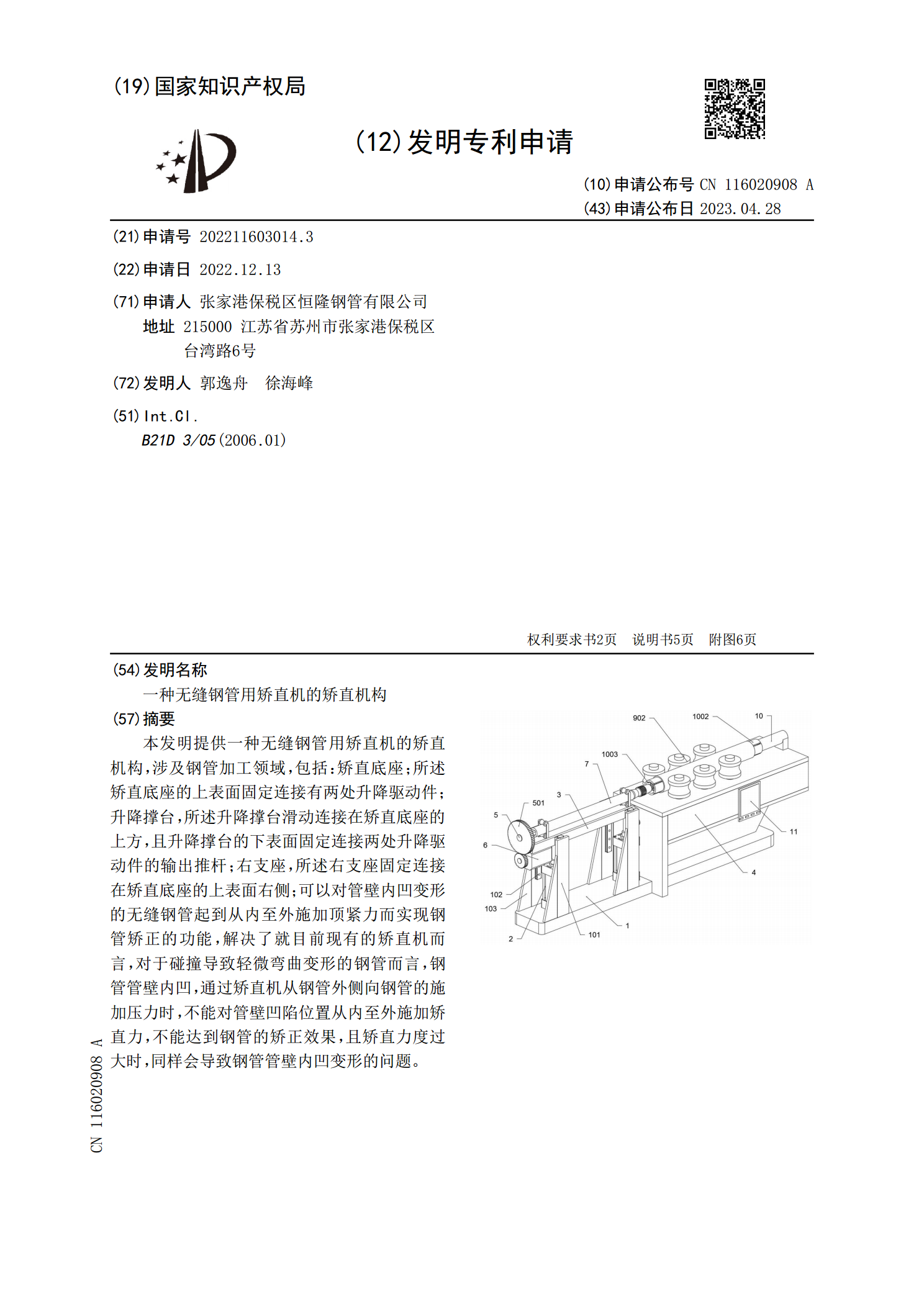
本发明提供一种无缝钢管用矫直机的矫直机构,涉及钢管加工领域,包括:矫直底座;所述矫直底座的上表面固定连接有两处升降驱动件;升降撑台,所述升降撑台滑动连接在矫直底座的上方,且升降撑台的下表面固定连接两处升降驱动件的输出推杆;右支座,所述右支座固定连接在矫直底座的上表面右侧;可以对管壁内凹变形的无缝钢管起到从内至外施加顶紧力而实现钢管矫正的功能,解决了就目前现有的矫直机而言,对于碰撞导致轻微弯曲变形的钢管而言,钢管管壁内凹,通过矫直机从钢管外侧向钢管的施加压力时,不能对管壁凹陷位置从内至外施加矫直力,不能达到
一种扁钢矫直机.pdf
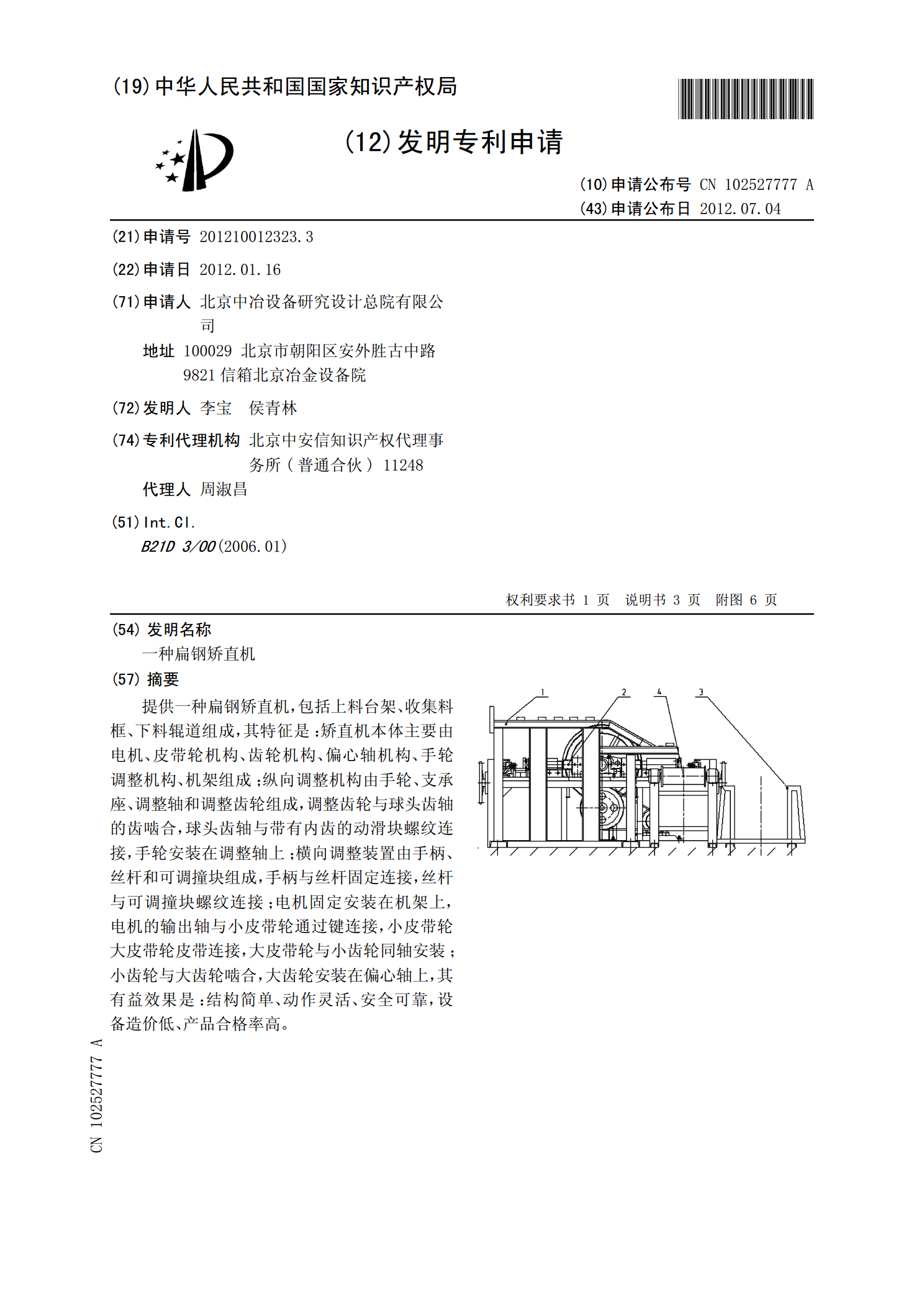
提供一种扁钢矫直机,包括上料台架、收集料框、下料辊道组成,其特征是:矫直机本体主要由电机、皮带轮机构、齿轮机构、偏心轴机构、手轮调整机构、机架组成;纵向调整机构由手轮、支承座、调整轴和调整齿轮组成,调整齿轮与球头齿轴的齿啮合,球头齿轴与带有内齿的动滑块螺纹连接,手轮安装在调整轴上;横向调整装置由手柄、丝杆和可调撞块组成,手柄与丝杆固定连接,丝杆与可调撞块螺纹连接;电机固定安装在机架上,电机的输出轴与小皮带轮通过键连接,小皮带轮大皮带轮皮带连接,大皮带轮与小齿轮同轴安装;小齿轮与大齿轮啮合,大齿轮安装在偏心
一种压力矫直机.pdf
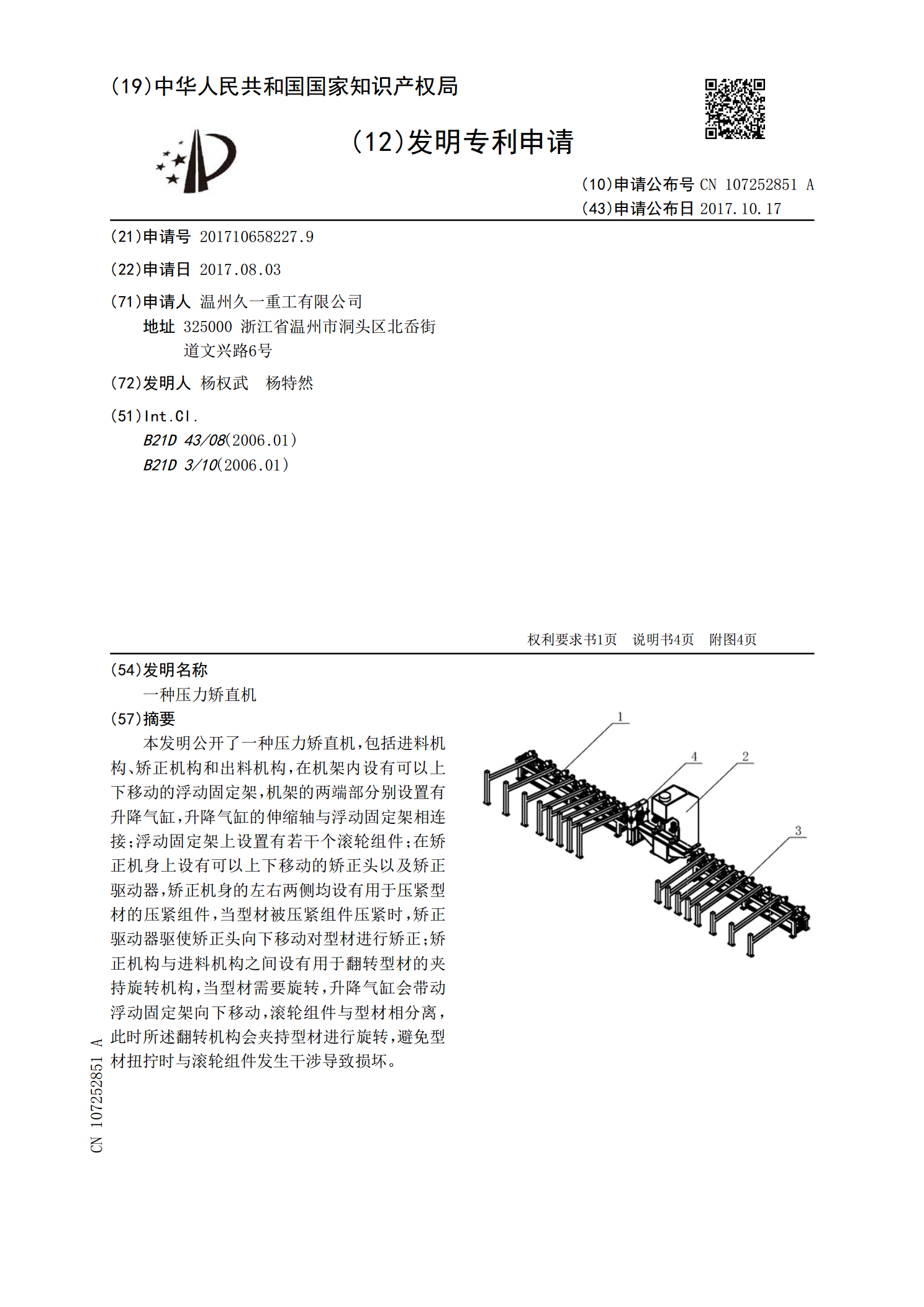
本发明公开了一种压力矫直机,包括进料机构、矫正机构和出料机构,在机架内设有可以上下移动的浮动固定架,机架的两端部分别设置有升降气缸,升降气缸的伸缩轴与浮动固定架相连接;浮动固定架上设置有若干个滚轮组件;在矫正机身上设有可以上下移动的矫正头以及矫正驱动器,矫正机身的左右两侧均设有用于压紧型材的压紧组件,当型材被压紧组件压紧时,矫正驱动器驱使矫正头向下移动对型材进行矫正;矫正机构与进料机构之间设有用于翻转型材的夹持旋转机构,当型材需要旋转,升降气缸会带动浮动固定架向下移动,滚轮组件与型材相分离,此时所述翻转机