
测井深度误差校正方法、装置及系统.pdf

哲妍****彩妍


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
测井深度误差校正方法、装置及系统.pdf
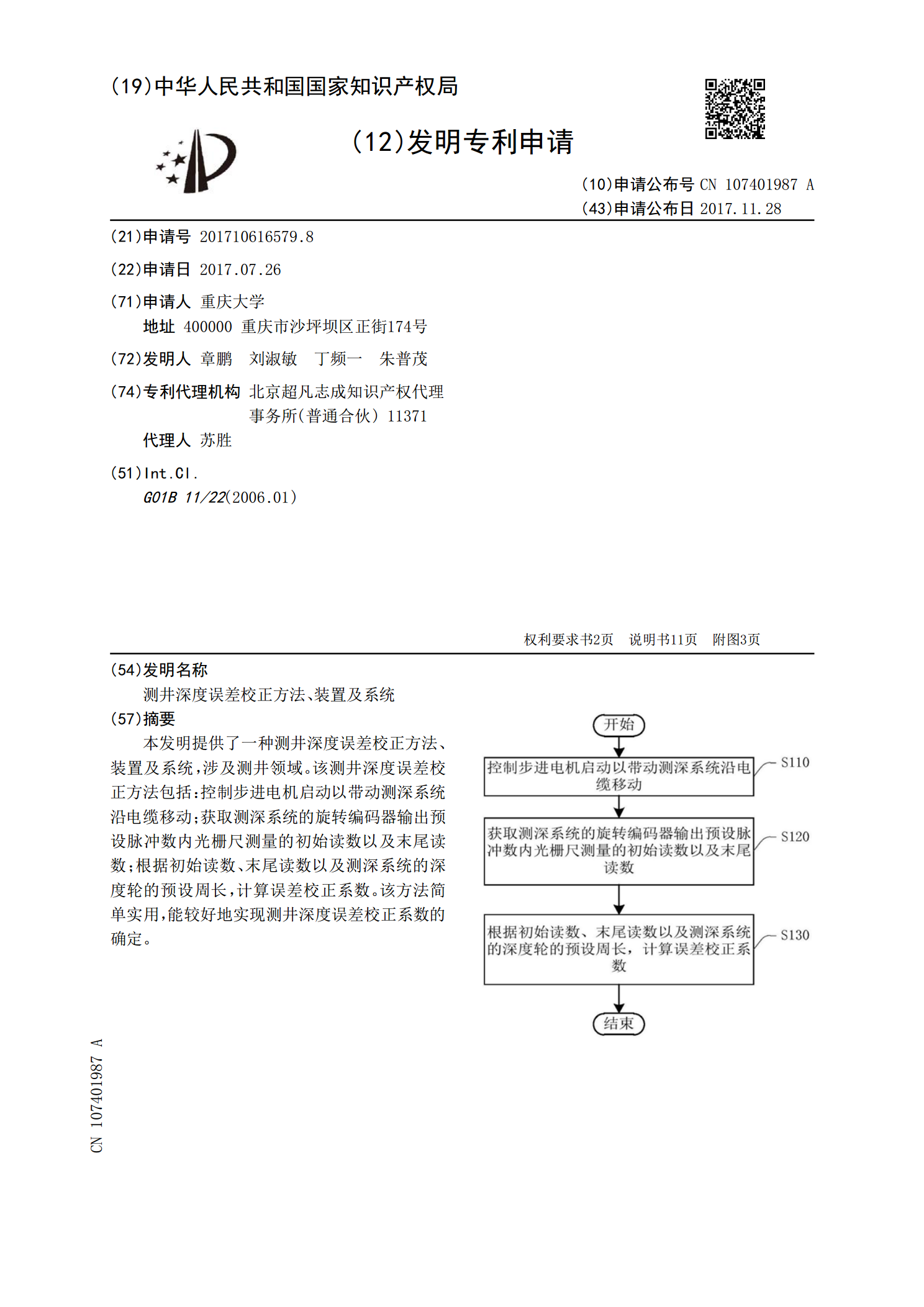
本发明提供了一种测井深度误差校正方法、装置及系统,涉及测井领域。该测井深度误差校正方法包括:控制步进电机启动以带动测深系统沿电缆移动;获取测深系统的旋转编码器输出预设脉冲数内光栅尺测量的初始读数以及末尾读数;根据初始读数、末尾读数以及测深系统的深度轮的预设周长,计算误差校正系数。该方法简单实用,能较好地实现测井深度误差校正系数的确定。

PSJ-2型测井系统深度误差的校正方法.docx
PSJ-2型测井系统深度误差的校正方法PSJ-2型测井系统是一种常见的测井设备,可用于测量井眼直径、井壁电阻率和自然伽马射线强度等参数。在使用该设备进行测量时,为了获得准确的数据,需要对其进行校正。其中,深度误差是一项重要的误差类型,本论文将就如何校正PSJ-2型测井系统的深度误差,进行阐述。一、PSJ-2型测井系统深度误差的原因在进行测井操作时,PSJ-2型测井系统的深度误差主要受以下几个因素的影响:1.井深测量精度不够:在进行测量时,错误的井深值会导致测量结果的深度偏差。2.曲率半径误差:由于钻井过程

测井系统中的测井深度校正计算方法.pdf
本发明公开了一种测井系统中的测井深度校正计算方法,包括对编码轮反馈的体现电缆轮盘正反转情况的正、反转脉冲信号进行计数的步骤;对计数值进行电缆轮盘磨损校正和电缆拉伸校正的步骤;以及根据校正后的计数值计算实际的测井深度值的步骤。采用该校正计算方法可以获得更为准确的测井深度值,进而为获得准确的测井数据提供支持,以很好地满足目前的测井作业要求。与此同时,通过对测井系统中的关键信号处理模块采用热冗余备份技术,从而提高了系统运行的可靠性,确保了测井作业的设备安全。

风向标安装误差校正方法、装置及系统.pdf
提供一种风向标安装误差校正方法、装置及系统。该风向标安装误差校正方法包括:获取机组叶片和发电机外转子的图像;从机组叶片和发电机外转子的图像中获取机组叶片的轮廓和发电机外转子的轮廓;根据发电机外转子的轮廓和机组叶片中的两个叶片的轮廓,计算机组中心线;获取机组中心线与发电机外转子的轮廓的交点,得到第一交点;获取风向标朝向面,根据机组中心线和风向标朝向面判断风向标是否与机组中心线对准;当风向标与机组中心线不对准时,根据风向标朝向面和所述第一交点计算风向标与机组中心线之间偏差的角度,并根据风向标与机组中心线之间偏

一种测井曲线环境校正方法、系统及装置.pdf
本发明公开一种测井曲线环境校正方法、系统及装置,应用频谱分析技术将时域测井曲线转换为频域幅值‑频率曲线,时域测井曲线上周期性规律变化特征将转化为频域曲线上的高频段幅值异常,结合信号滤波技术消除该异常,再将频域曲线转换为时域曲线,完成测井曲线螺纹井眼影响校正;滤波方法更合理,螺纹井眼对测井曲线的影响彻底滤除,且保留高频段有用信号,重构滤除异常部分信号,保留信号完整性;一种能够快速、有效消除螺纹井眼对测井曲线影响的校正方法,保留有用信号。