
输出装置以及输出系统.pdf

Ja****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

输出装置以及输出系统.pdf
设置有辅助操作杆(22)沿轴心方向的移动的助力机构(5)。形成于操作杆(22)的外周的卡合凹部(52)具有供卡合球(51)卡合的凸轮面(52a)。设置有移动的支承孔(53),其容许卡合球(51)沿操作杆(22)的半径方向的移动,但限制卡合球(51)沿操作杆(22)的轴心方向的移动。设置有对卡合球(51)进行按压的按压部件(54),该按压部件(54)具有助力面(54a)。
声音输出装置、声音输出系统以及控制方法.pdf
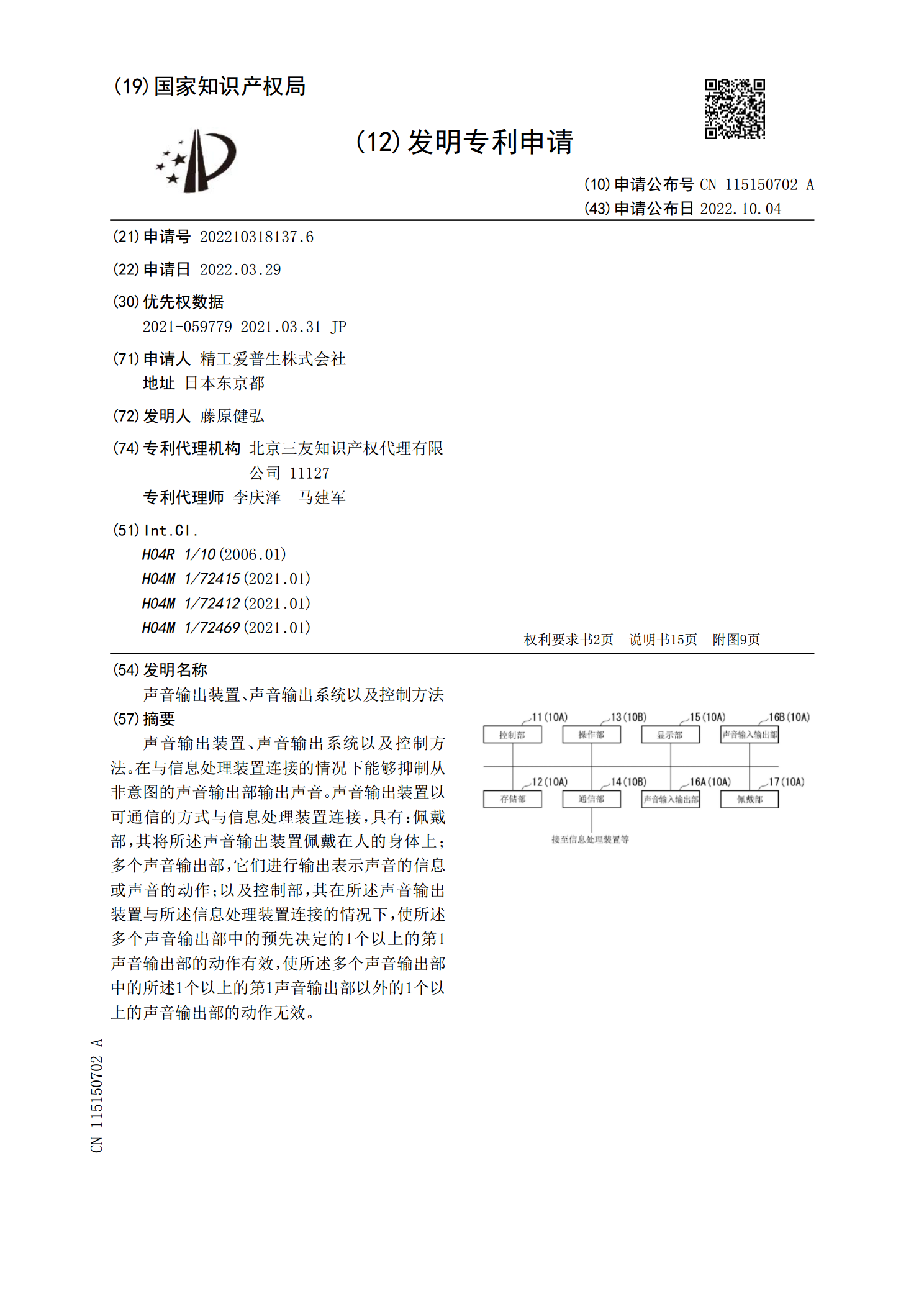
声音输出装置、声音输出系统以及控制方法。在与信息处理装置连接的情况下能够抑制从非意图的声音输出部输出声音。声音输出装置以可通信的方式与信息处理装置连接,具有:佩戴部,其将所述声音输出装置佩戴在人的身体上;多个声音输出部,它们进行输出表示声音的信息或声音的动作;以及控制部,其在所述声音输出装置与所述信息处理装置连接的情况下,使所述多个声音输出部中的预先决定的1个以上的第1声音输出部的动作有效,使所述多个声音输出部中的所述1个以上的第1声音输出部以外的1个以上的声音输出部的动作无效。
系统、输出设备、服务器装置以及输出方法.pdf
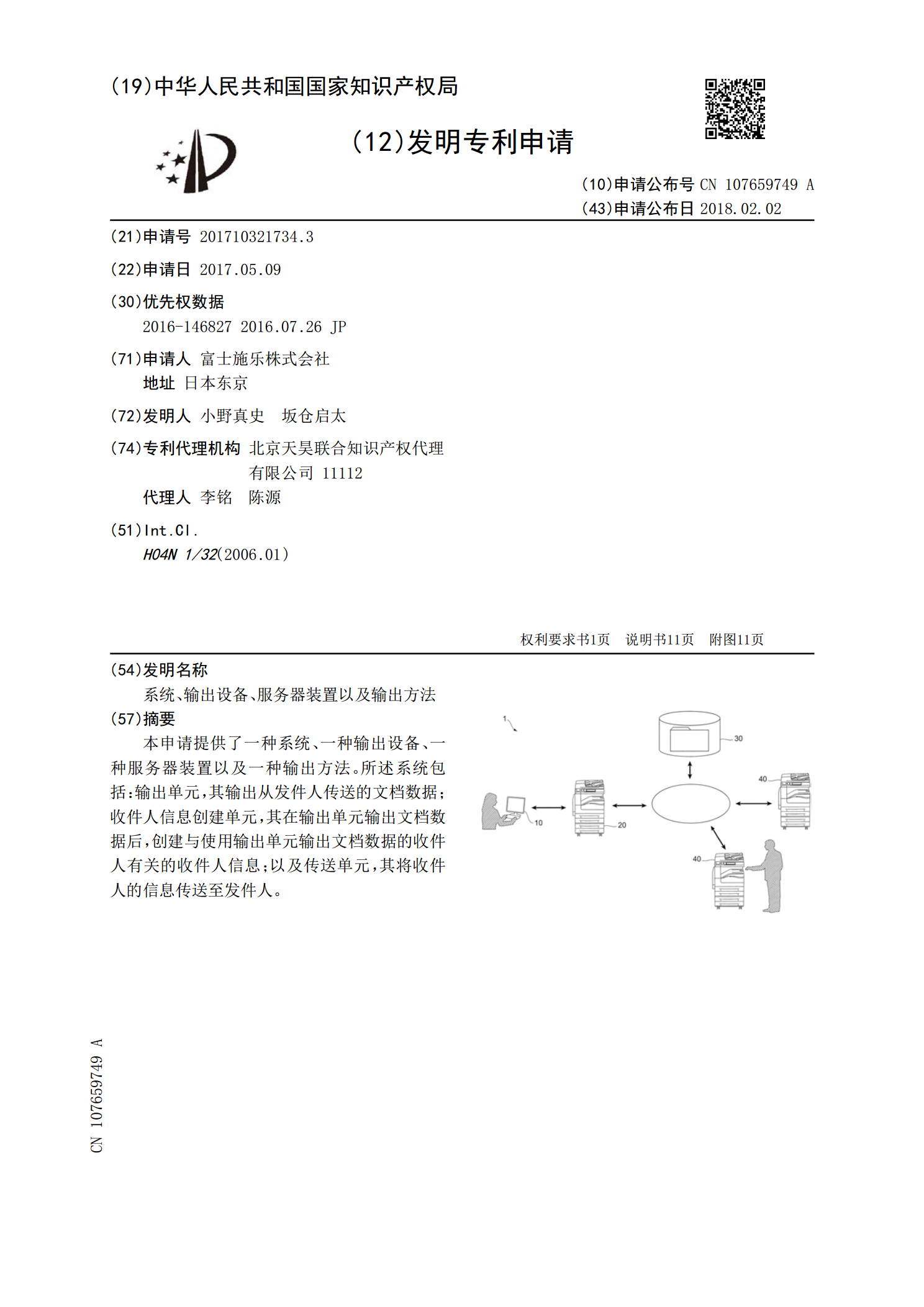
本申请提供了一种系统、一种输出设备、一种服务器装置以及一种输出方法。所述系统包括:输出单元,其输出从发件人传送的文档数据;收件人信息创建单元,其在输出单元输出文档数据后,创建与使用输出单元输出文档数据的收件人有关的收件人信息;以及传送单元,其将收件人的信息传送至发件人。

蜂鸣器输出控制装置以及蜂鸣器输出控制方法.pdf
使蜂鸣器无异音混入地鸣响。非可听频率信号生成部22生成具有非可听频率的非可听频率脉冲信号P0,可听频率信号生成部26根据非可听频率脉冲信号P0生成具有可听频率的可听频率脉冲信号P1,信号合成部28生成在可听频率脉冲信号P1的接通时间内合成了非可听频率脉冲信号P0的合成频率脉冲信号P2,第一占空比设定部30将合成到合成频率脉冲信号P2中的非可听频率脉冲信号P0的占空比Di设定为在合成频率脉冲信号P2的最初的规定的期间逐渐变大而生成蜂鸣器驱动信号P3,蜂鸣器驱动部40以具有与蜂鸣器驱动信号P3的频率对应的音高

声音输出装置、声音输出方法以及声音输出程序存储介质.pdf
公开了声音输出装置、声音输出方法以及声音输出程序存储介质。提供一种声音输出装置,具备:受理部,受理支援移动体的运行的运行信息;以及输出部,在正在从声音输出部播放乐曲的情况下,将通知由所述受理部受理的运行信息的声音与正在播放的乐曲的音高及曲调的至少一方相匹配地,从所述声音输出部输出。