
微型扑翼飞行器.pdf

美丽****ka

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
微型扑翼飞行器.pdf
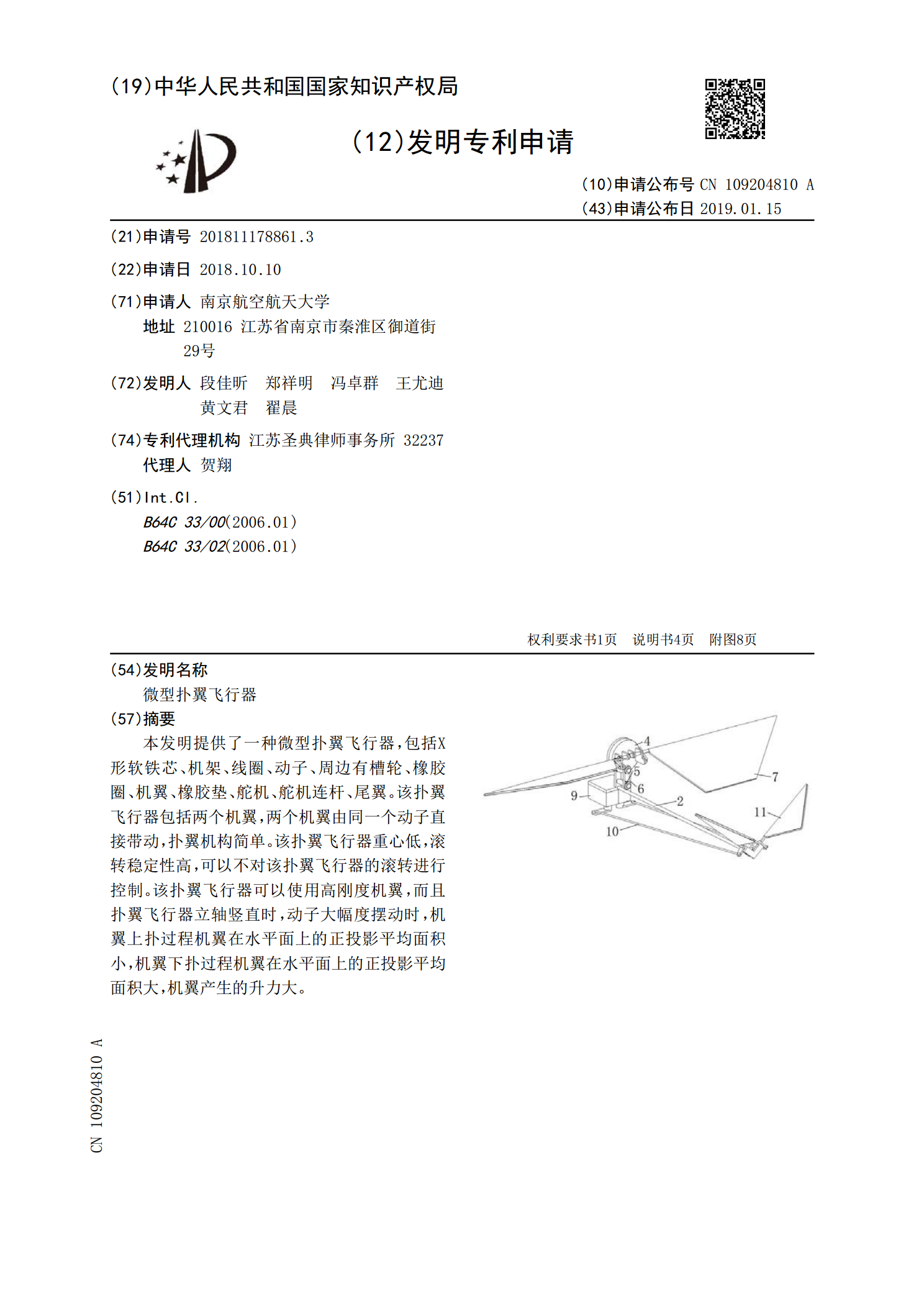
本发明提供了一种微型扑翼飞行器,包括X形软铁芯、机架、线圈、动子、周边有槽轮、橡胶圈、机翼、橡胶垫、舵机、舵机连杆、尾翼。该扑翼飞行器包括两个机翼,两个机翼由同一个动子直接带动,扑翼机构简单。该扑翼飞行器重心低,滚转稳定性高,可以不对该扑翼飞行器的滚转进行控制。该扑翼飞行器可以使用高刚度机翼,而且扑翼飞行器立轴竖直时,动子大幅度摆动时,机翼上扑过程机翼在水平面上的正投影平均面积小,机翼下扑过程机翼在水平面上的正投影平均面积大,机翼产生的升力大。
微型扑翼飞行器.pdf
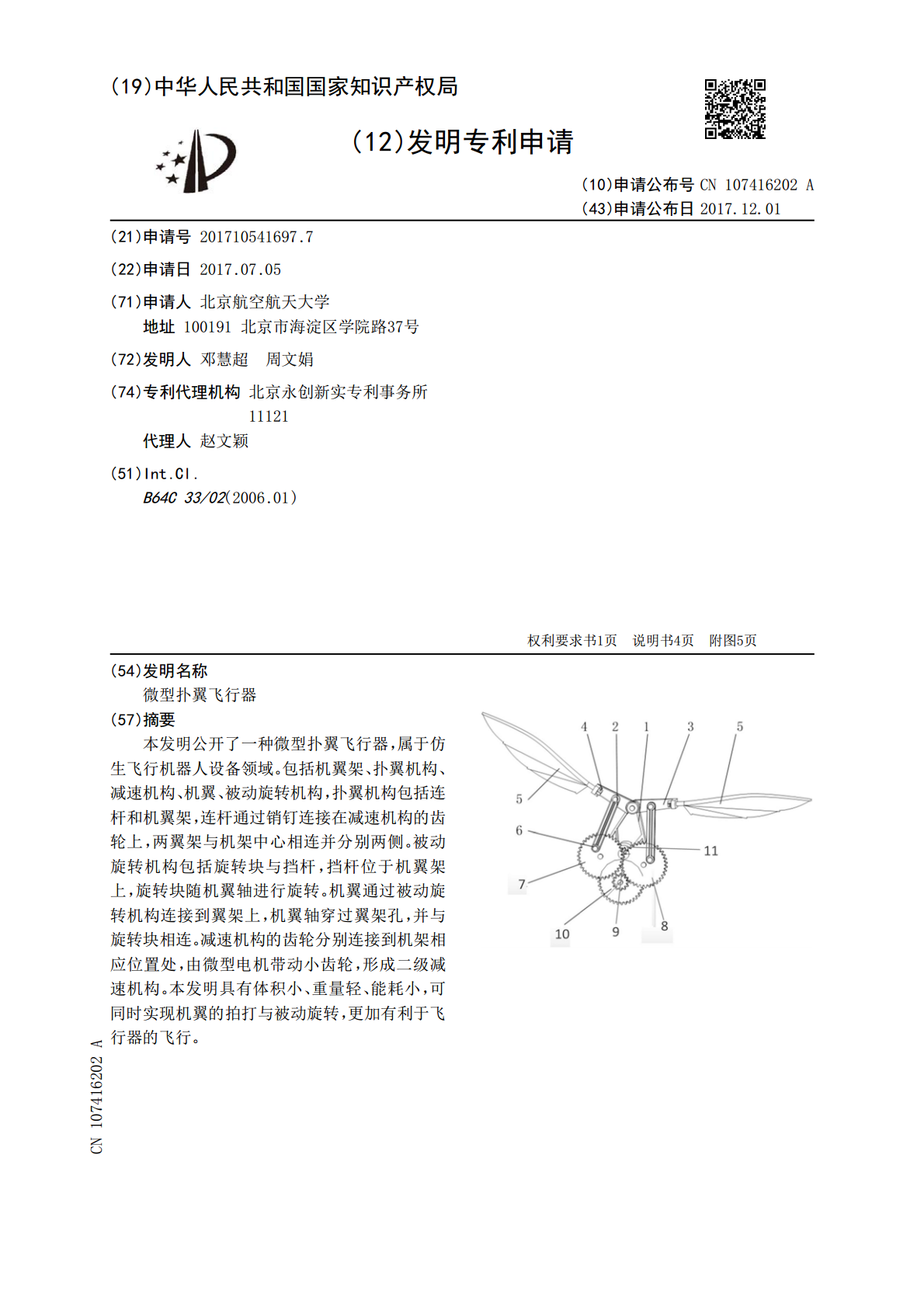
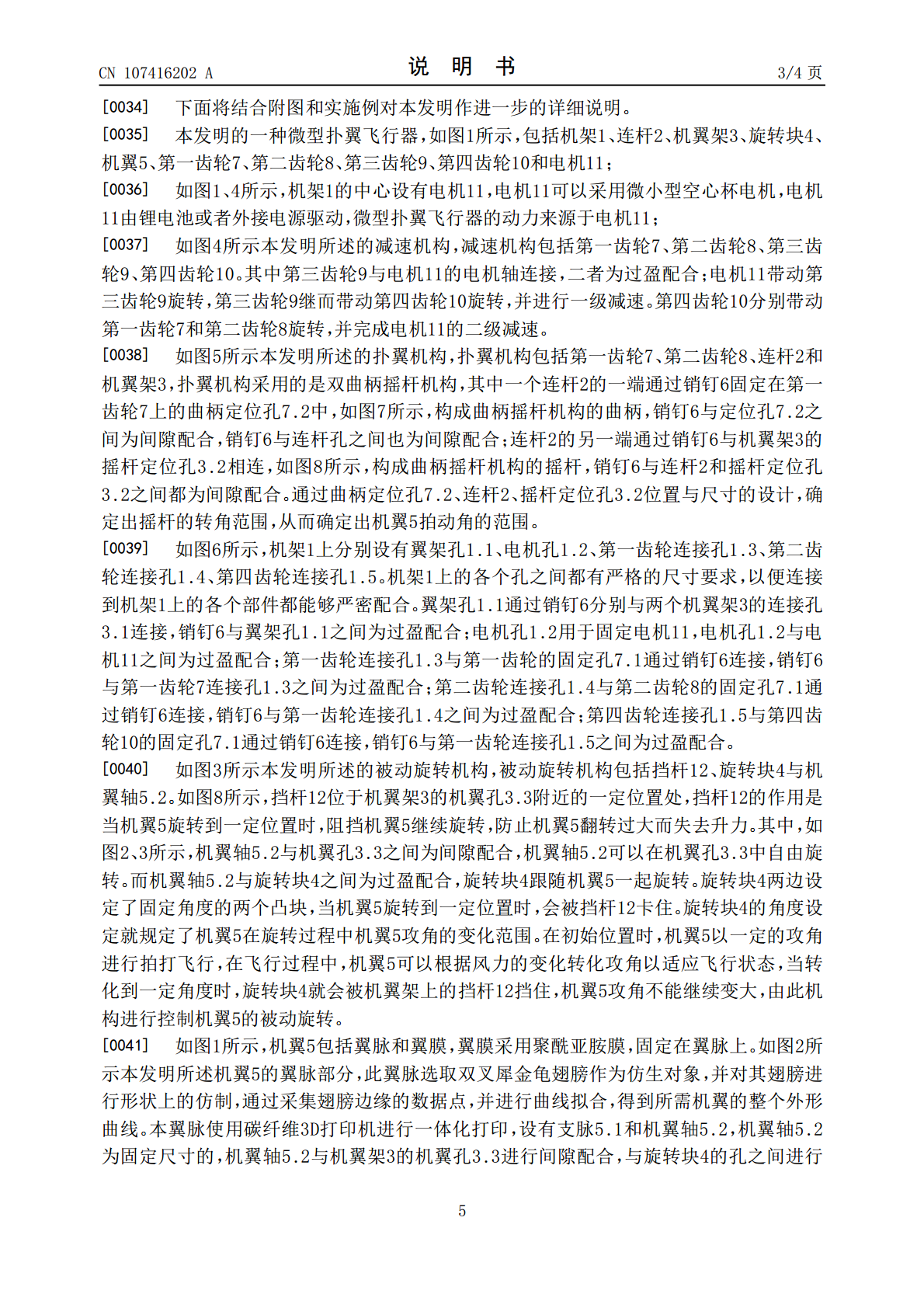
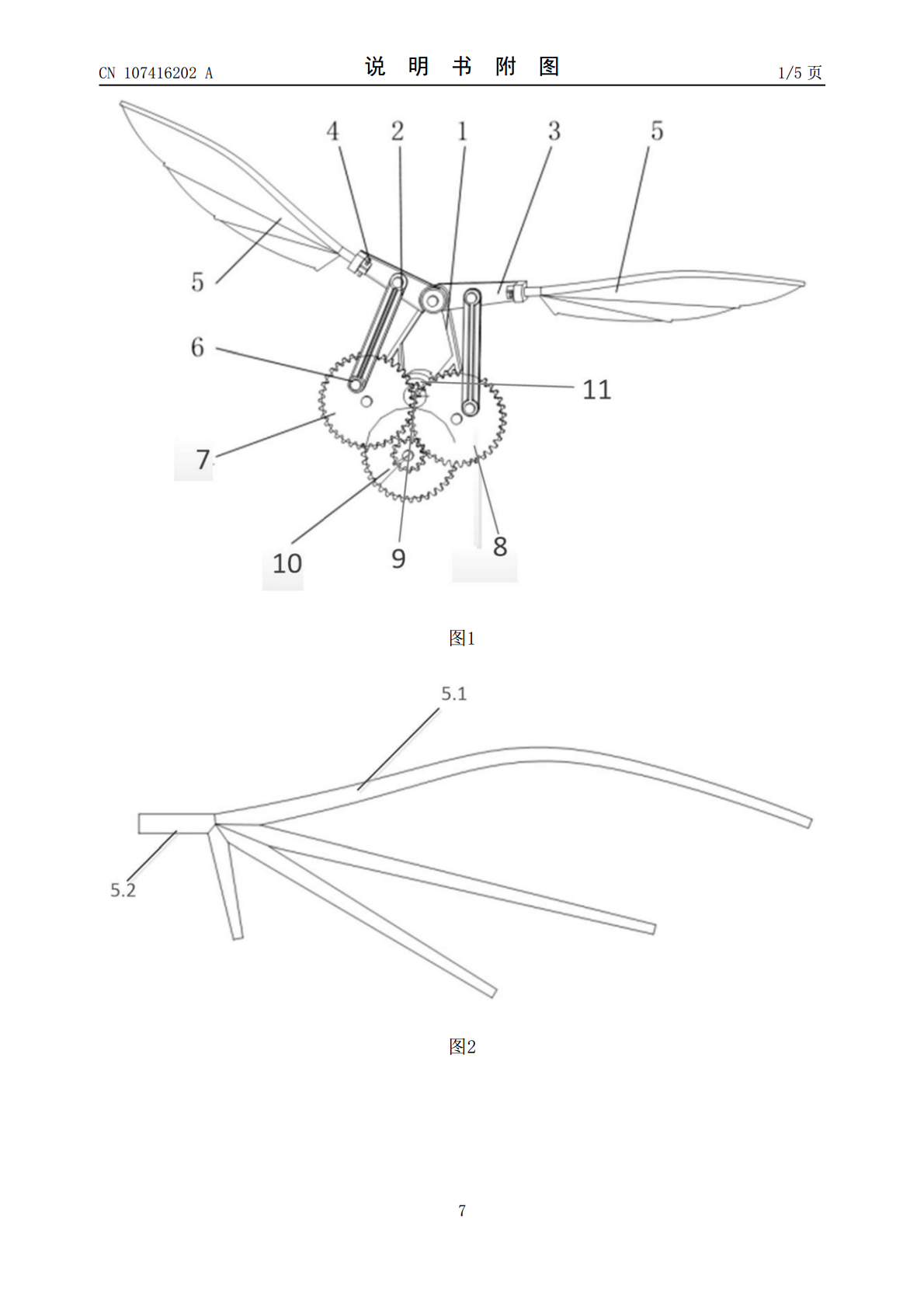
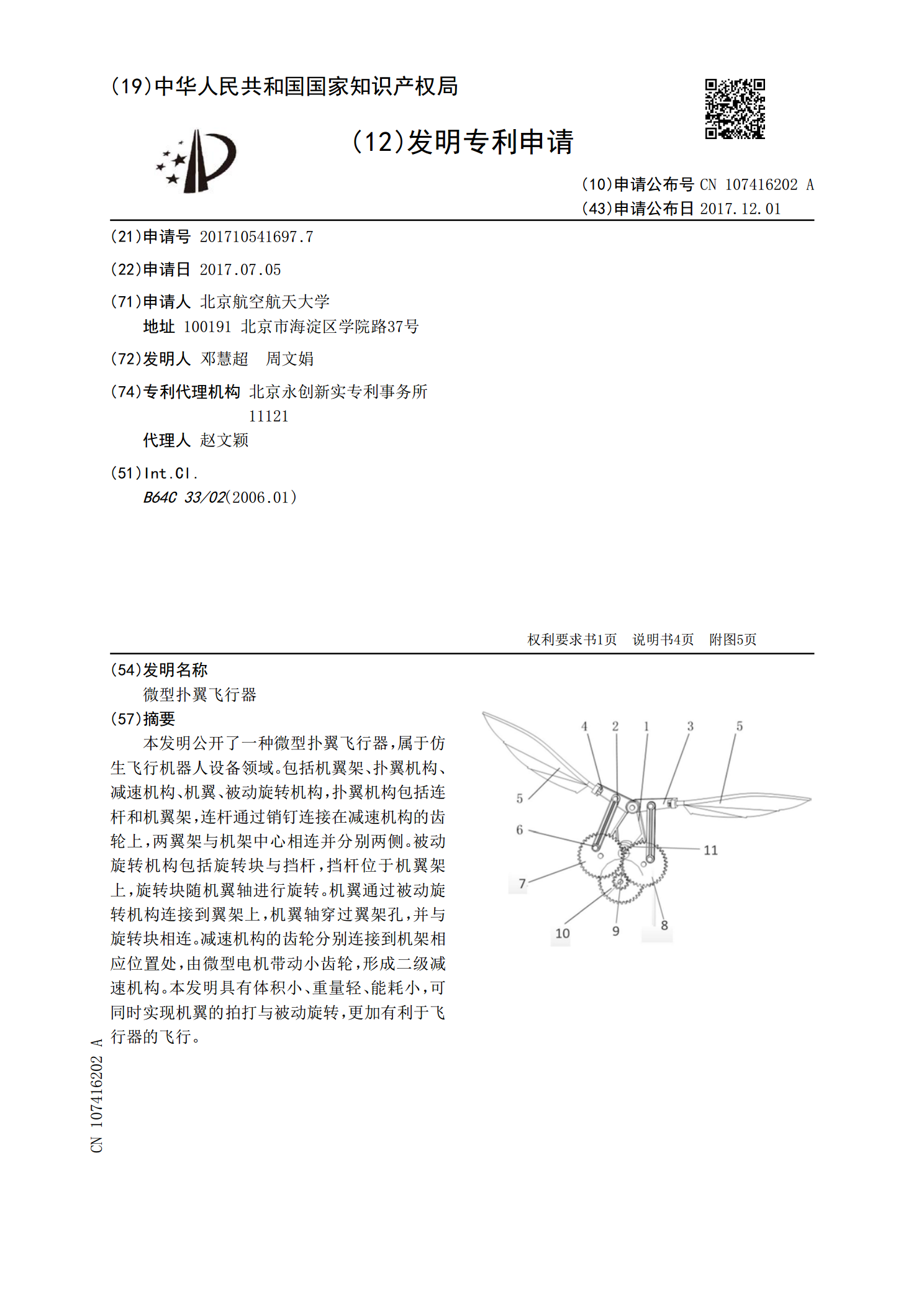
本发明公开了一种微型扑翼飞行器,属于仿生飞行机器人设备领域。包括机翼架、扑翼机构、减速机构、机翼、被动旋转机构,扑翼机构包括连杆和机翼架,连杆通过销钉连接在减速机构的齿轮上,两翼架与机架中心相连并分别两侧。被动旋转机构包括旋转块与挡杆,挡杆位于机翼架上,旋转块随机翼轴进行旋转。机翼通过被动旋转机构连接到翼架上,机翼轴穿过翼架孔,并与旋转块相连。减速机构的齿轮分别连接到机架相应位置处,由微型电机带动小齿轮,形成二级减速机构。本发明具有体积小、重量轻、能耗小,可同时实现机翼的拍打与被动旋转,更加有利于飞行器的

仿蜻蜓四翼微型扑翼飞行器.pdf
本发明公开了一种仿蜻蜓四翼微型扑翼飞行器,包括:机身、两个前扑动翼、两个带有连杆的前翼连接件、两个后扑动翼、两个带有连杆的后翼连接件、主动齿轮、轴齿轮、一级齿轮、两带有连杆的二级齿轮、两带有连杆的三级齿轮、两个前球头连杆、两个后球头连杆、两个舵机连杆、两个舵机、一个直流无刷电机。该仿蜻蜓微型扑翼飞行器基于仿生学设计,相较于现有的固定翼及旋翼飞行器,整体轻便,能源利用效率高,适应低雷诺数飞行环境,可广泛用于低速高机动性飞行的场景中。

微型飞行器扑翼及转向装置.pdf
本发明公开了一种微型飞行器扑翼及转向装置,包括扑翼摇杆、圆柱销、连接板,驱动电机、连杆、安装架、齿轮、转向杆、尾翼支撑板、转向电机、摆臂、转动件和摆动架。驱动电机带动一级小齿轮转动,一级小齿轮带动双层齿轮转动,双层齿轮带动两侧的二级大齿轮转动,二级大齿轮带动连杆运动,连杆带动左、右翼连接板及扑翼摇杆上下摆动,从而实现翅膀的扑动。转向电机带动摆动架摆动,摆动架内转动件带动摆臂绕圆柱销转动,使两转向杆角度发生偏转,实现飞行器的转向。本发明将扑翼装置及转向装置连接为一个整体,有利于扑翼飞行器的微型化,同时本发明

锥齿轮四翼式扑翼微型飞行器.pdf
一种锥齿轮四翼式扑翼微型飞行器,包括:两对扑动机构、机架和电机驱动组件。扑动机构包含一个主动锥齿轮和两个从动锥齿轮以及四连杆机构,主动锥齿轮固定于机架底部中央,两个从动锥齿轮位于机架前后两侧分别与主动锥齿轮啮合并带动四连杆机构运动,四连杆机构将锥齿轮旋转运动转变成翅杆拍打运动。通过调节从动锥齿轮上两个摇杆的相对位置可以使前后两对翅膀实现同步或异步等多相位差的拍打,能够在飞行过程中高效地调节飞行器的动态平衡,并且为飞行器提供足够大的升力和推进力。整个机构采用常见材料制成,具有结构简单、易加工和易实现微型化。