
气缸套内径高精度大范围自动测量装置及测量方法.pdf

丹烟****魔王

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
气缸套内径高精度大范围自动测量装置及测量方法.pdf
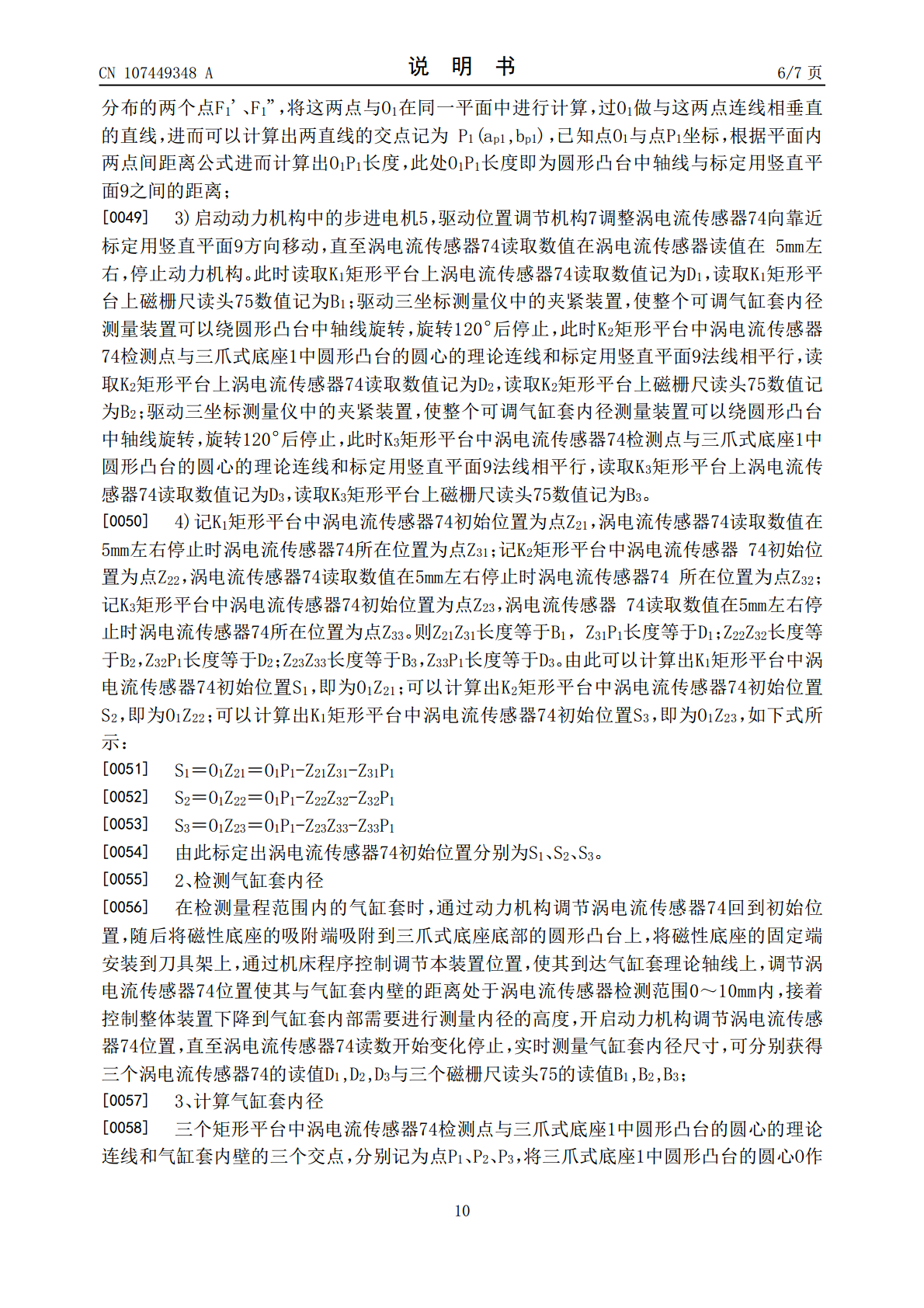
本发明公开了一种气缸套内径高精度大范围自动测量装置,包括三爪式底座,在三爪式底座的中心设有圆形凸台,底座均安装有内板和外板,在内板和外板之间设有平行分布的光轴和丝杠,光轴和丝杠均穿过L型连接件,三个内板形成的空间内安装有传动轴,传动轴与电机连接,传动轴下端与主动锥齿轮连接,主动锥齿轮与三个从动锥齿轮啮合,从动锥齿轮与丝杠连接,在L型连接件上固定安装有丝杠螺母和涡电流传感器,在短边上安装有测量位移的磁栅尺读头,在三爪式底座上安装有磁尺。本发明采用电机带动涡电流传感器直线运动,磁栅尺读头实时检测位置变化,从而

基于高精度同轴定位的多参数内径测量系统与测量方法.pdf
本发明涉及一种基于高精度同轴定位的多参数内径测量系统与测量方法,包括行走定位机构、激光位移传感器、激光测距仪、电机驱动装置、微控制模块、无线传输网络、上位机软件、便携式电源、光学倾斜测角装置以及多点测温补偿装置。系统由靠柔性件联接的双锥体联动机构实现两面六点定轴。激光位移传感器用于测量相对位移量。激光测距仪用于测量轴向前进距离。四个伺服电机分别驱动定位机构、双轮行走、测量臂旋转。微控制模块实现数据采集、状态检测、电机控制等。无线传输网络实现下位机和上位机所有信息传递。上位机软件用于数据处理和测量控制。便携
一种深盲孔内径自动测量装置及测量方法.pdf
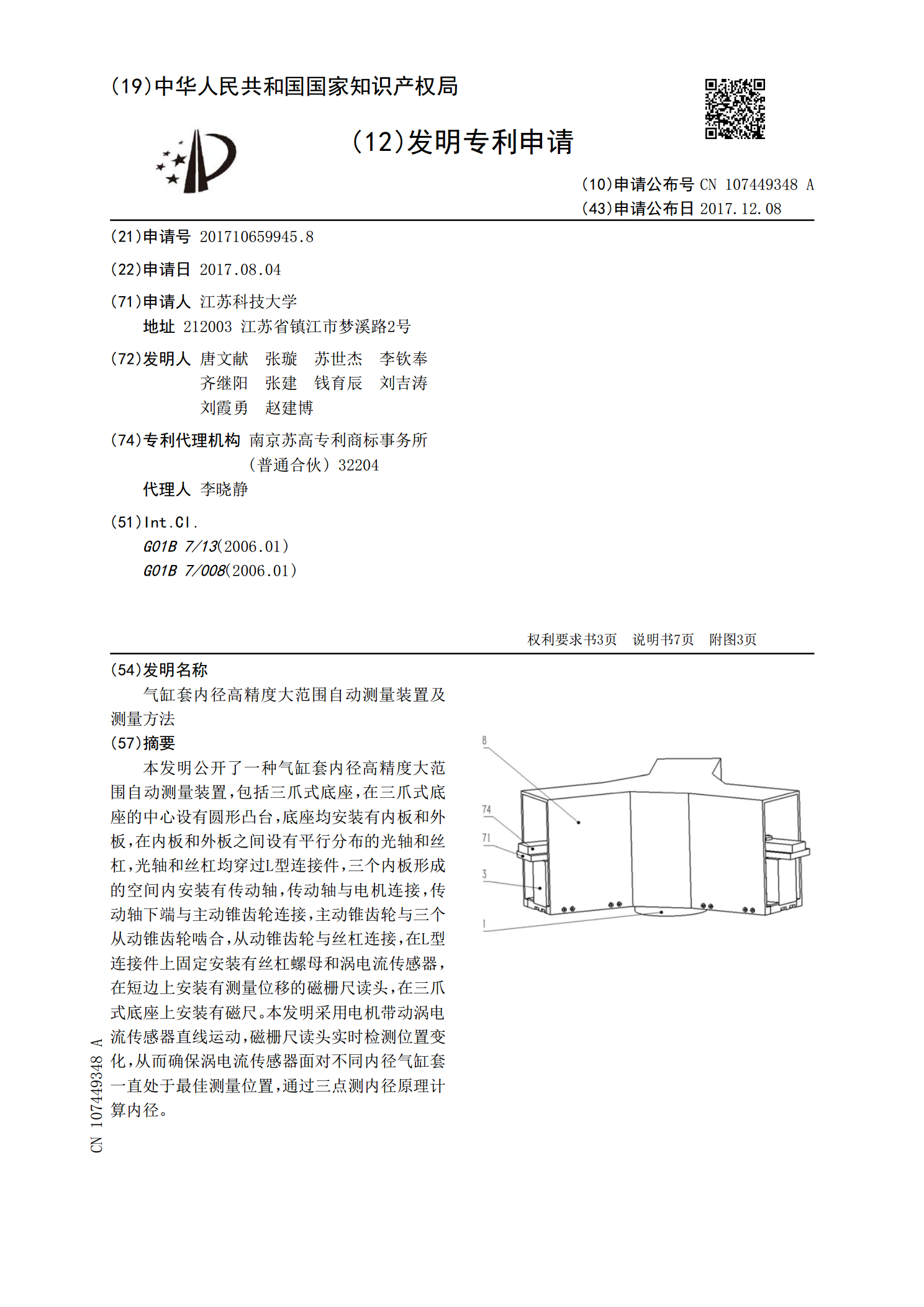
本发明公开了一种深盲孔内径自动测量装置及测量方法,包括前置测量模块、中置止停模块和后置驱动模块,所述的前置测量模块经过中置止停模块与后置驱动模块相连。测量时,首先将前置测量模块、中置止停模块和后置驱动模块依次由内到外放置于待测的深盲孔中;其次,后置驱动模块推动前置测量模块和中置止停模块在深盲孔中行进,前置测量模块同时完成深盲孔内径量测;最后,中置止停模块在深盲孔底端自动停下测量装置,同时后置驱动模块带动前置测量模块和中置止停模块反向行至孔口。本发明采用非接触式的前置测量模块、自适应的后置驱动模块和自动的中
高精度多路温度测量方法及高精度多路温度测量装置.pdf
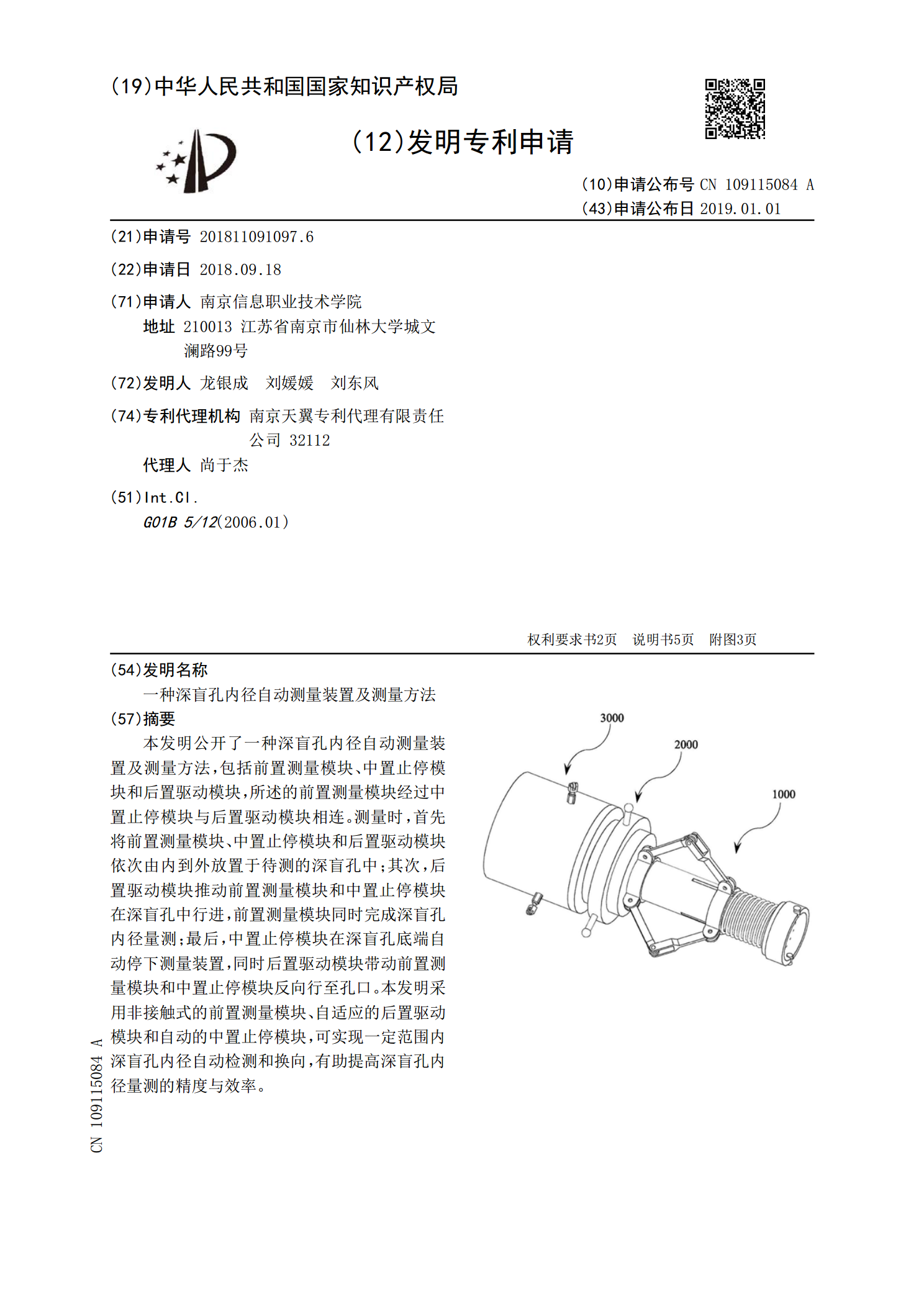
本发明公开了一种高精度多路温度测量方法和一种高精度多路温度测量装置,该装置包括有基于NiosII的最小系统,基于NiosII的最小系统的外围器件,温度传感器组及其温度传感器控制器组;温度传感器控制器组和基于NiosII的最小系统在同一FPGA实现,并与该基于NiosII的最小系统中的Avalon总线相连。温度传感器控制器组将测得的温度值送到该Avalon总线上,NiosII处理器按顺序读取和用LCD显示所测得的温度,并按设定的数据帧格式,对温度数据进行打包,然后通过USB口发送到上位PC机。本高精度多路温
高精度气压自动测量装置.pdf
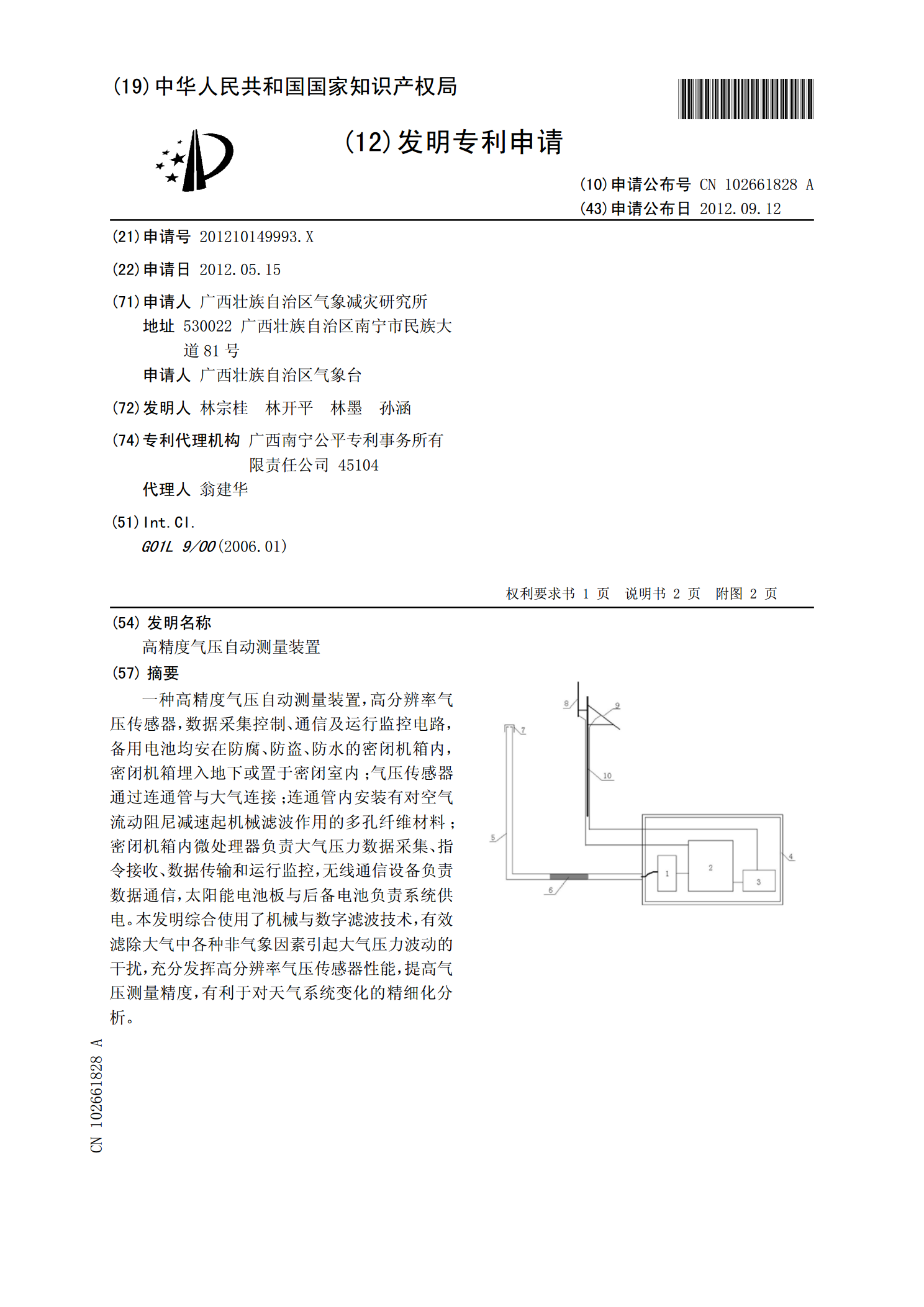
一种高精度气压自动测量装置,高分辨率气压传感器,数据采集控制、通信及运行监控电路,备用电池均安在防腐、防盗、防水的密闭机箱内,密闭机箱埋入地下或置于密闭室内;气压传感器通过连通管与大气连接;连通管内安装有对空气流动阻尼减速起机械滤波作用的多孔纤维材料;密闭机箱内微处理器负责大气压力数据采集、指令接收、数据传输和运行监控,无线通信设备负责数据通信,太阳能电池板与后备电池负责系统供电。本发明综合使用了机械与数字滤波技术,有效滤除大气中各种非气象因素引起大气压力波动的干扰,充分发挥高分辨率气压传感器性能,提高气