
铝基凸轮轴套三工位卷圆模具.pdf

书生****aa

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
铝基凸轮轴套三工位卷圆模具.pdf
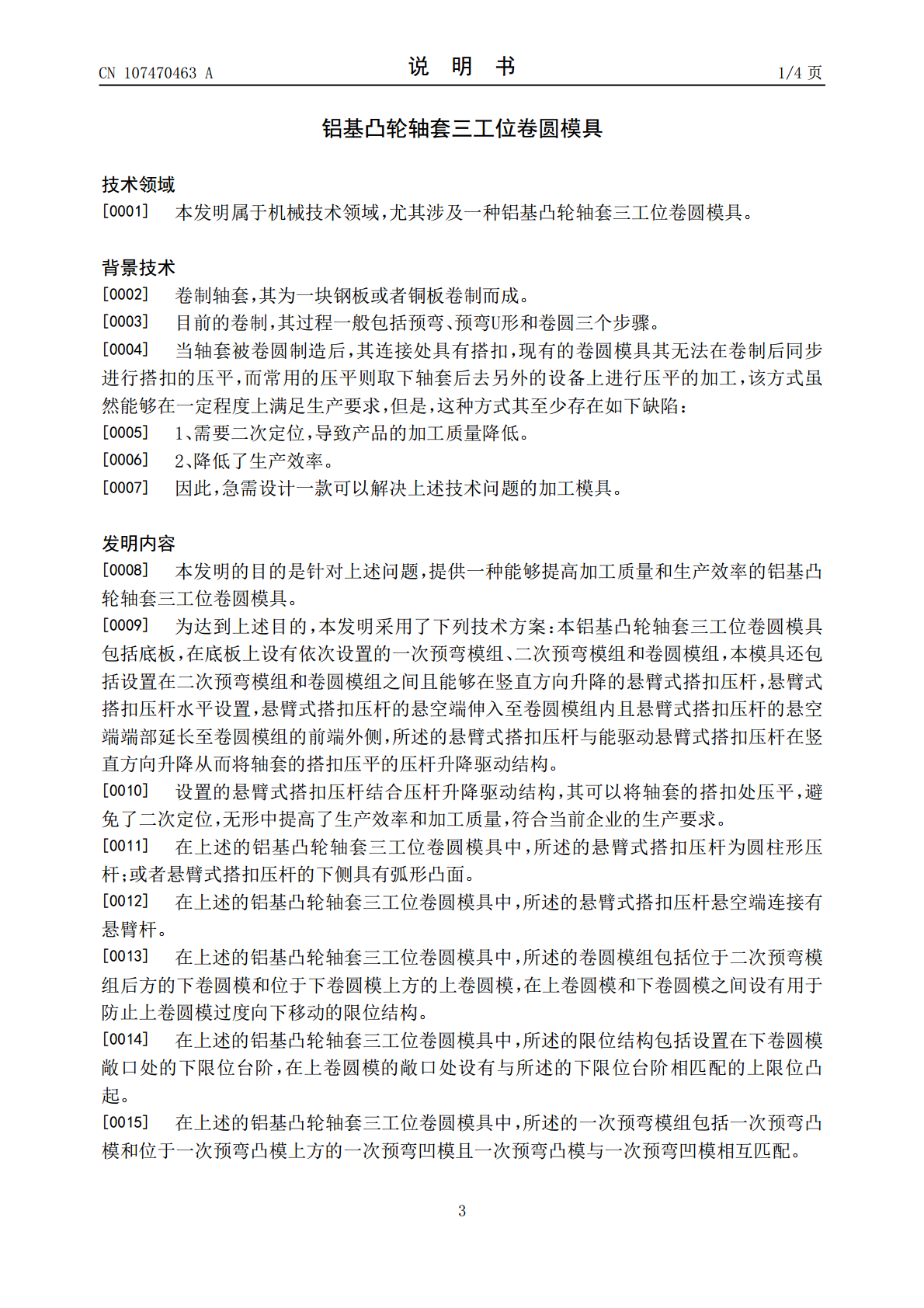
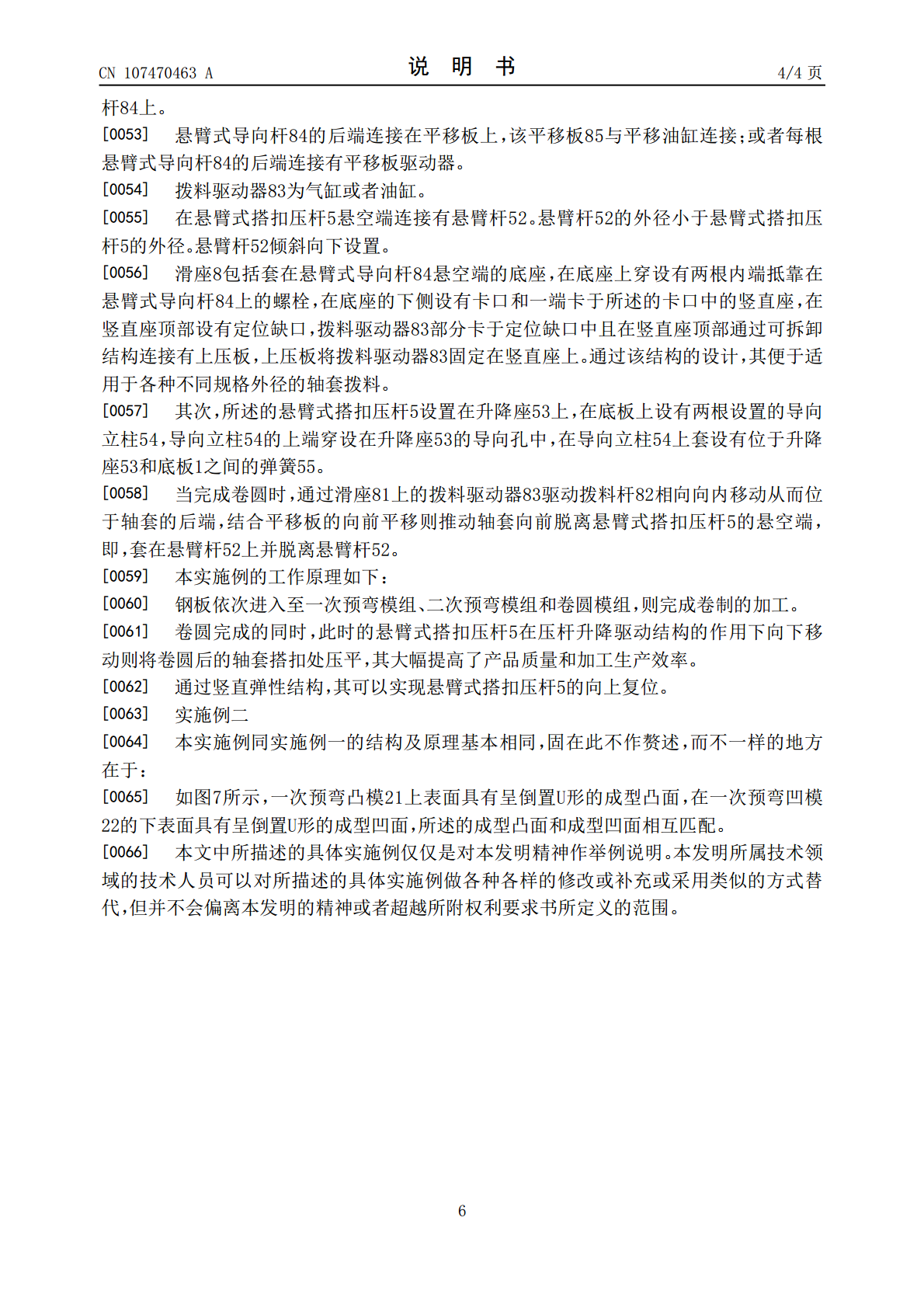
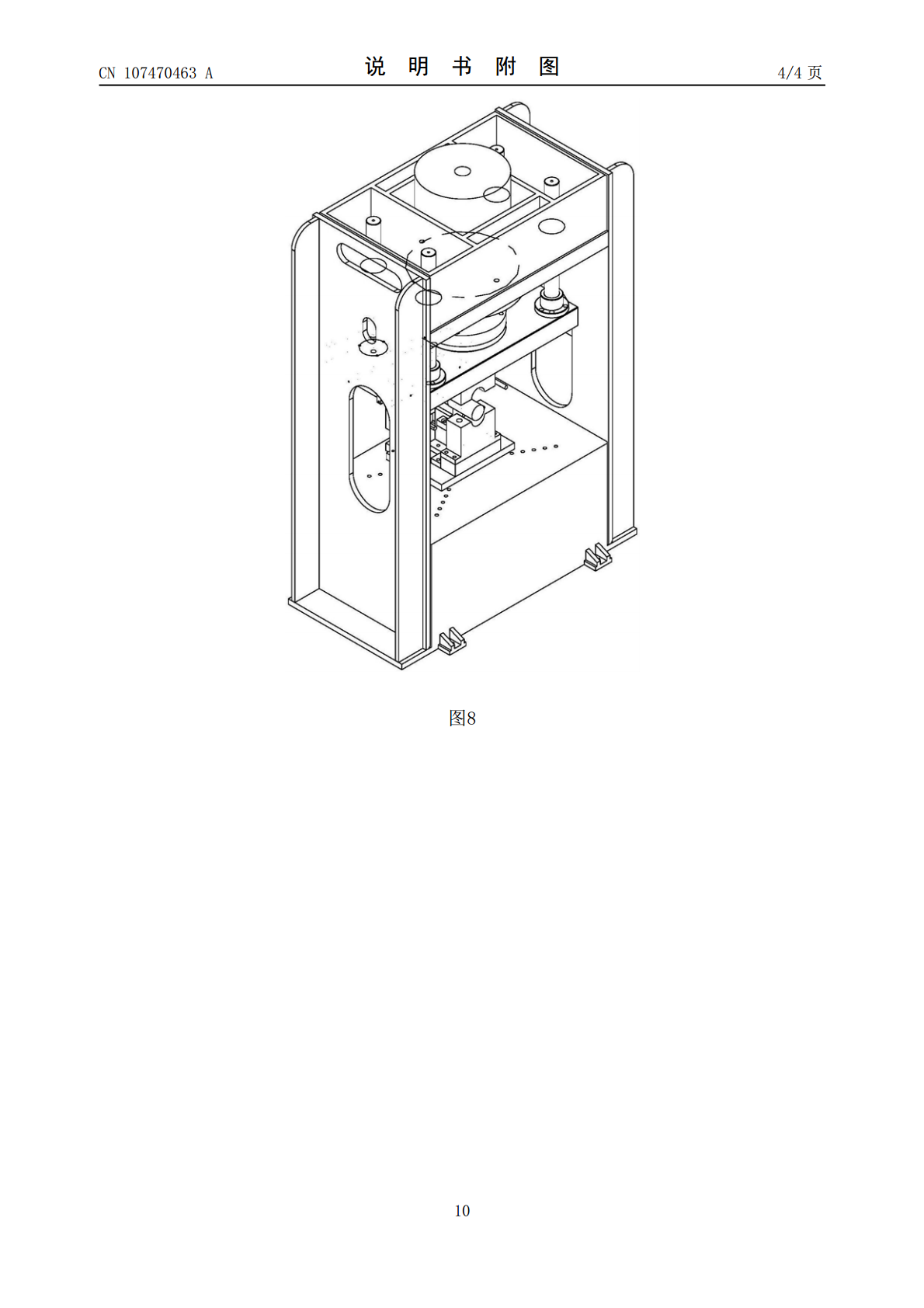
本发明属于机械技术领域,尤其涉及一种铝基凸轮轴套三工位卷圆模具。它解决了现有技术设计不合理等问题。本铝基凸轮轴套三工位卷圆模具包括底板,在底板上设有依次设置的一次预弯模组、二次预弯模组和卷圆模组,本模具还包括设置在二次预弯模组和卷圆模组之间且能够在竖直方向升降的悬臂式搭扣压杆,悬臂式搭扣压杆水平设置,悬臂式搭扣压杆的悬空端伸入至卷圆模组内且悬臂式搭扣压杆的悬空端端部延长至卷圆模组的前端外侧,所述的悬臂式搭扣压杆与能驱动悬臂式搭扣压杆在竖直方向升降从而将轴套的搭扣压平的压杆升降驱动结构。本发明的优点在于:能
铝基凸轮轴套三工位卷圆设备.pdf
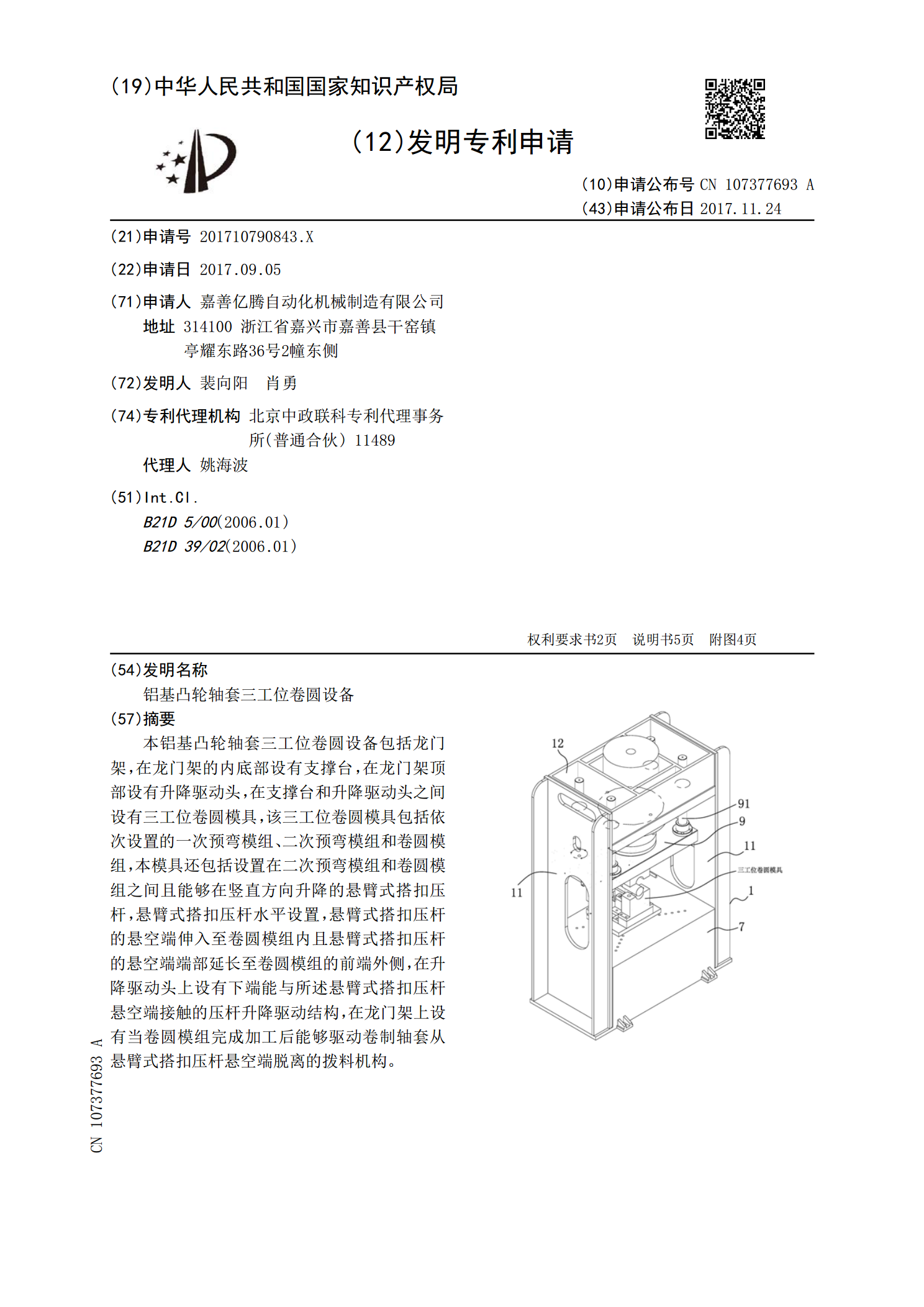
本铝基凸轮轴套三工位卷圆设备包括龙门架,在龙门架的内底部设有支撑台,在龙门架顶部设有升降驱动头,在支撑台和升降驱动头之间设有三工位卷圆模具,该三工位卷圆模具包括依次设置的一次预弯模组、二次预弯模组和卷圆模组,本模具还包括设置在二次预弯模组和卷圆模组之间且能够在竖直方向升降的悬臂式搭扣压杆,悬臂式搭扣压杆水平设置,悬臂式搭扣压杆的悬空端伸入至卷圆模组内且悬臂式搭扣压杆的悬空端端部延长至卷圆模组的前端外侧,在升降驱动头上设有下端能与所述悬臂式搭扣压杆悬空端接触的压杆升降驱动结构,在龙门架上设有当卷圆模组完成加

MATLAB校核凸轮基圆.doc
>>a=0:0.001:2*pi/3;%%a的定义域[0,2π3]>>s=sin(3*a/2);%%替换>>c=cos(3*a/2);>>t=tan(pi/6);>>r=sqrt(((30*s-10)/t-20+20*c).^2+100);%%主体函数r>>plot(a,r);%%作图,生成Figure1。>>>>[value,index]=max(r)%%找出最大的rvalue=58.1559index=2095由此取基圆半径ro=60mma=0:0.001:2*pi/3;s=sin(3*a/2);c=

凸轮轴的凸轮基圆的检测装置.pdf
本发明公开了一种凸轮轴的凸轮基圆的检测装置,包括:校对件,其包括直径为第一标准直径的第一标准圆柱和直径为第二标准直径的第二标准圆柱;测量组件,其包括:V型测爪,其包括本体和两个测爪,两个测爪对称布置在本体的下端,且两个测爪成一定的角度,本体的中心处设有通孔;测量轴,测量轴的下端穿过通孔;测量套,其中心处设有用于安装测量轴的测量轴容置孔,测量套的下端与本体固定连接;以及百分表,其量杆固定在测量套上,测头与测量轴的顶面抵接。该装置在凸轮轴水平放置时进行测量,测量时定位准确,测量误差小,且测量困难较小,重复性好

多工位凸轮搬运机构.pdf
本发明公开了一种多工位凸轮搬运机构,包括底板、设置在所述底板中部的转轴、与所述转轴底部驱动连接的电机、设置于所述转轴上部的转盘、设置在所述底板上的安装架、设置在所述安装架上的安装板、沿凸轮轨迹开设在所述安装板底面上的环形状的滑槽及多个呈环形均匀间隔布置的底部滑动设置在所述转盘上且顶部滑动设置在所述滑槽内的抓取移栽组件。本发明的多工位凸轮搬运机构,通过电机驱动多个工位同时进行产品搬运,抓取移栽组件沿凸轮轨迹往复运动的同时,抓取移栽组件上的抓爪上下往复运动进行产品抓取和移栽,将产品由一个工位依次移栽到下一工位