
一种用于创伤手指康复的关节力矩测量系统.pdf

努力****妙风


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于创伤手指康复的关节力矩测量系统.pdf
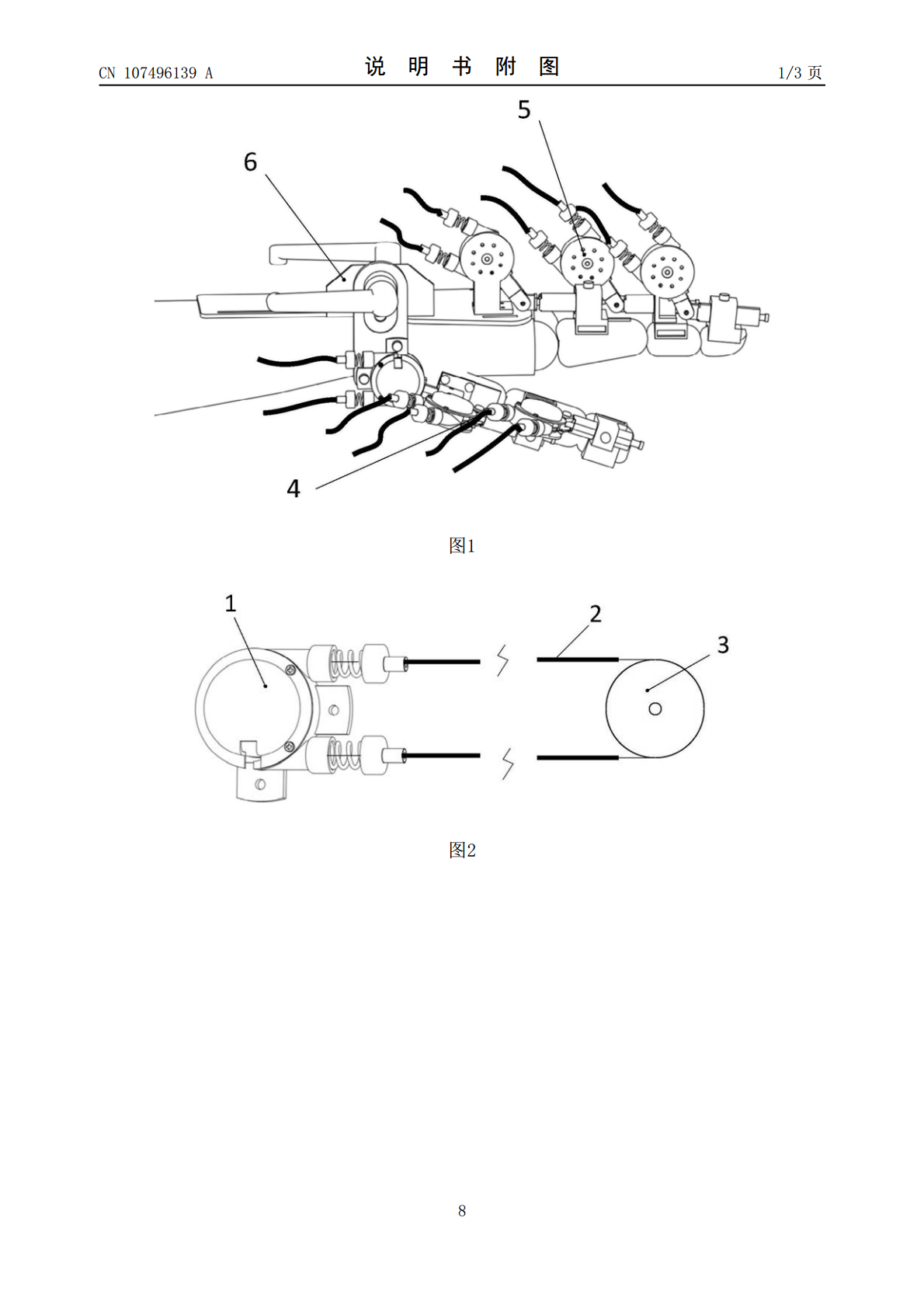
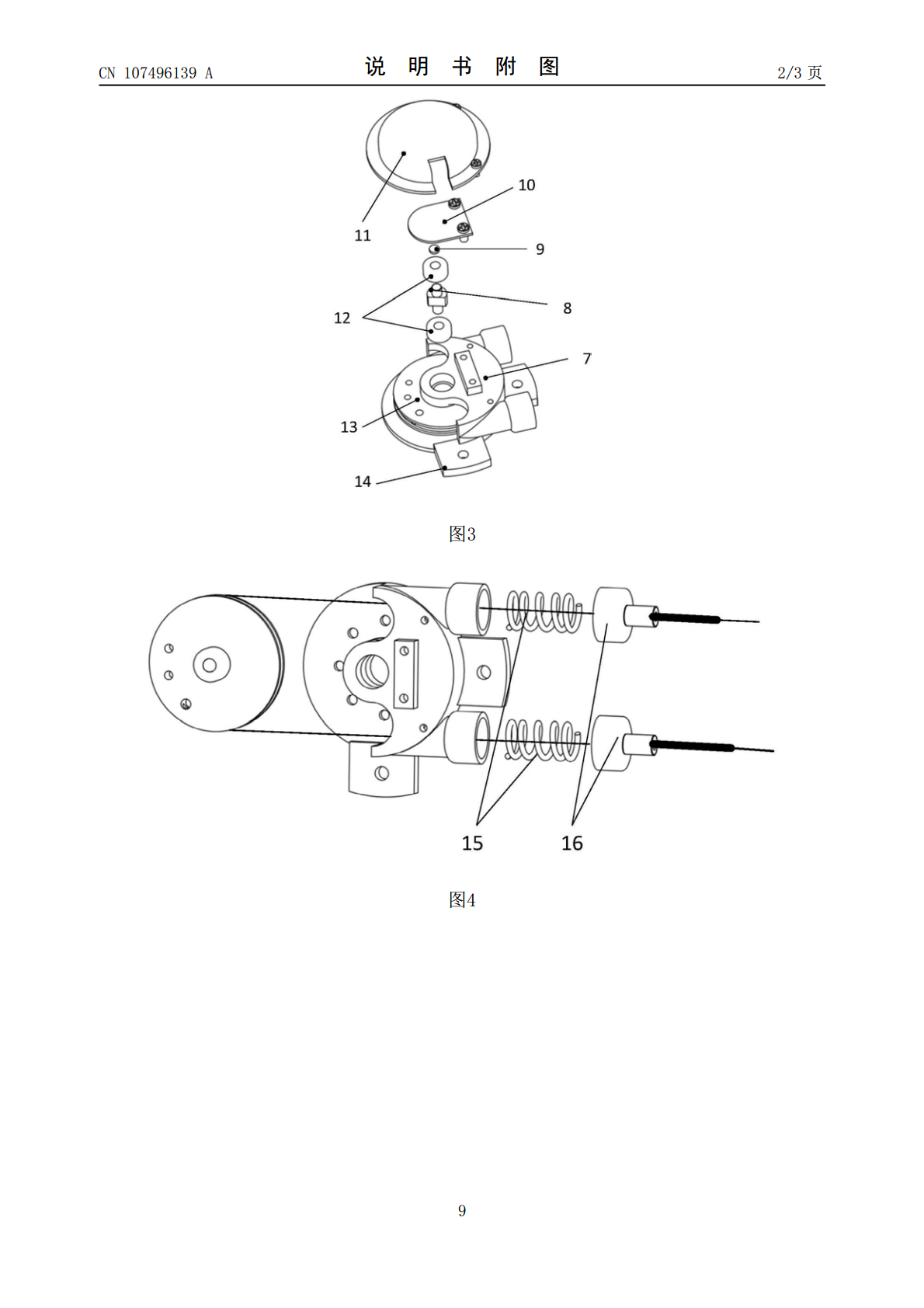
一种用于创伤手指康复的关节力矩测量系统,它涉及一种关节力矩测量系统。本发明解决现有的康复机械手一般不具备感知功能,存在无法测量手指关节与外骨骼之间的交互作用力大小的问题。电机输出端线轮安装在驱动电机的输出轴上,D型轴穿装在关节线轮上,D型轴的两端通过两个轴承安装在线轮架上,关节角度传感器通过螺钉固装在线轮架的上端面上,磁钢贴在D型轴的上端面上且磁钢与关节角度传感器正对设置,关节座端盖扣合在线轮架的上端面上,关节座固装在线轮架的侧壁上,线轮架设置有两个相互平行设置的穿线管,每个穿线管上设置有一个弹性元件,所

创伤手指康复外骨骼系统的研究.docx
创伤手指康复外骨骼系统的研究创伤手指康复外骨骼系统的研究摘要:创伤手指康复是一个复杂且具有挑战性的过程,在传统的康复方法中常常需要较长时间的恢复。然而,近年来,随着技术的发展,创伤手指康复外骨骼系统逐渐被应用于康复领域,为康复过程带来了新的希望。本文将重点研究创伤手指康复外骨骼系统的原理、应用以及未来发展方向,以期为该领域的研究提供理论与实践的指导。关键词:创伤手指康复;外骨骼系统;原理;应用;发展方向1.引言创伤手指康复涉及到复杂的生理和生物力学过程,需要长时间的恢复和康复治疗。传统的康复方法主要依赖于

创伤手指康复外骨骼手系统的设计.pdf
万方数据创伤手指康复外骨骼手系统的设计inj鹏1,付宜利1,王树国1,孟庆刚2system光学精密工程王(1.哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨150001;2.哈尔滨医科大学附属第四医院,黑龙江哈尔滨150001)offingersDesignrehabilitationhandexoskeletonforuredWANGYi—lil,WANGMedical摘要:在分析人手生物学特性的基础上,提出了一种新的外骨骼式机械手,用于创伤手指的术后康复治疗。基于模块化思想设计了外骨骼手机

一种用于关节骨折康复进程测量仪.pdf
本发明属于医疗器械领域,涉及一种康复进程测量仪,具体涉及一种用于关节骨折康复进程测量仪。该测量仪包括底板、分别固定在底板表面的定位管和用于测量骨折关节摆动角度和旋转角度的量角器。骨折患者通过使用该测量仪可准确获知骨折关节的康复进程情况,从而产生动力,快乐积极的面对骨折康复。

创伤手指康复外骨骼系统的研究的中期报告.docx
创伤手指康复外骨骼系统的研究的中期报告尊敬的XXX教授:我是您的博士生XXX,现就我在“创伤手指康复外骨骼系统”的研究中期报告向您汇报。一、研究背景在现代社会中,随着科技的发展,机械化、数字化、电子化等新技术的不断应用,人们的生活方式发生了巨大的变化,由此导致了手部劳损和手指受伤的情况越来越多。而手指是人体各个部位中最为灵活、最为重要的组成部分之一,其运动功能对于人类日常生活不可或缺。然而,由于手指骨骼细小,受伤容易,康复时间长,影响较大,因此开发一种高效的康复设备是必不可少的。外骨骼技术近年来发展成熟,