
夹紧装置.pdf

An****70

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
夹紧装置与夹紧力图.ppt
机床夹具简介夹紧装置组成示意图1—气缸2—连杆3—压板(1)力源装置图中1产生夹紧作用力的装置。所产生的力称为原始力(2)中间传力机构图中2介于力源和夹紧元件之间传递力的机构(3)夹紧元件图中3夹紧装置的最终执行件,与工件直接接触完成夹紧作用2.对夹具装置的要求(1)夹紧时应保持工件定位后所占据的正确位置。(2)夹紧力大小要适当。(3)夹紧机构的自动化程度和复杂程度应和工件的生产规模相适应,并有良好的结构工艺性,尽可能采用标准化元件。(4)夹紧动作要迅速、可靠,且操作要方便、省力、安全。良好的自锁性。夹紧

夹紧装置与夹紧力图分解.pptx
会计学夹紧装置组成示意图1—气缸2—连杆3—压板(1)力源装置图中1产生夹紧作用力的装置。所产生的力称为原始力(2)中间传力机构图中2介于力源和夹紧元件之间传递力的机构(3)夹紧元件图中3夹紧装置的最终执行件,与工件直接接触完成夹紧作用2.对夹具装置的要求(1)夹紧时应保持工件定位后所占据的正确位置。(2)夹紧力大小要适当。(3)夹紧机构的自动化程度和复杂程度应和工件的生产规模相适应,并有良好的结构工艺性,尽可能采用标准化元件。(4)夹紧动作要迅速、可靠,且操作要方便、省力、安全。良好的自锁性。夹紧力三要

夹紧装置.pdf
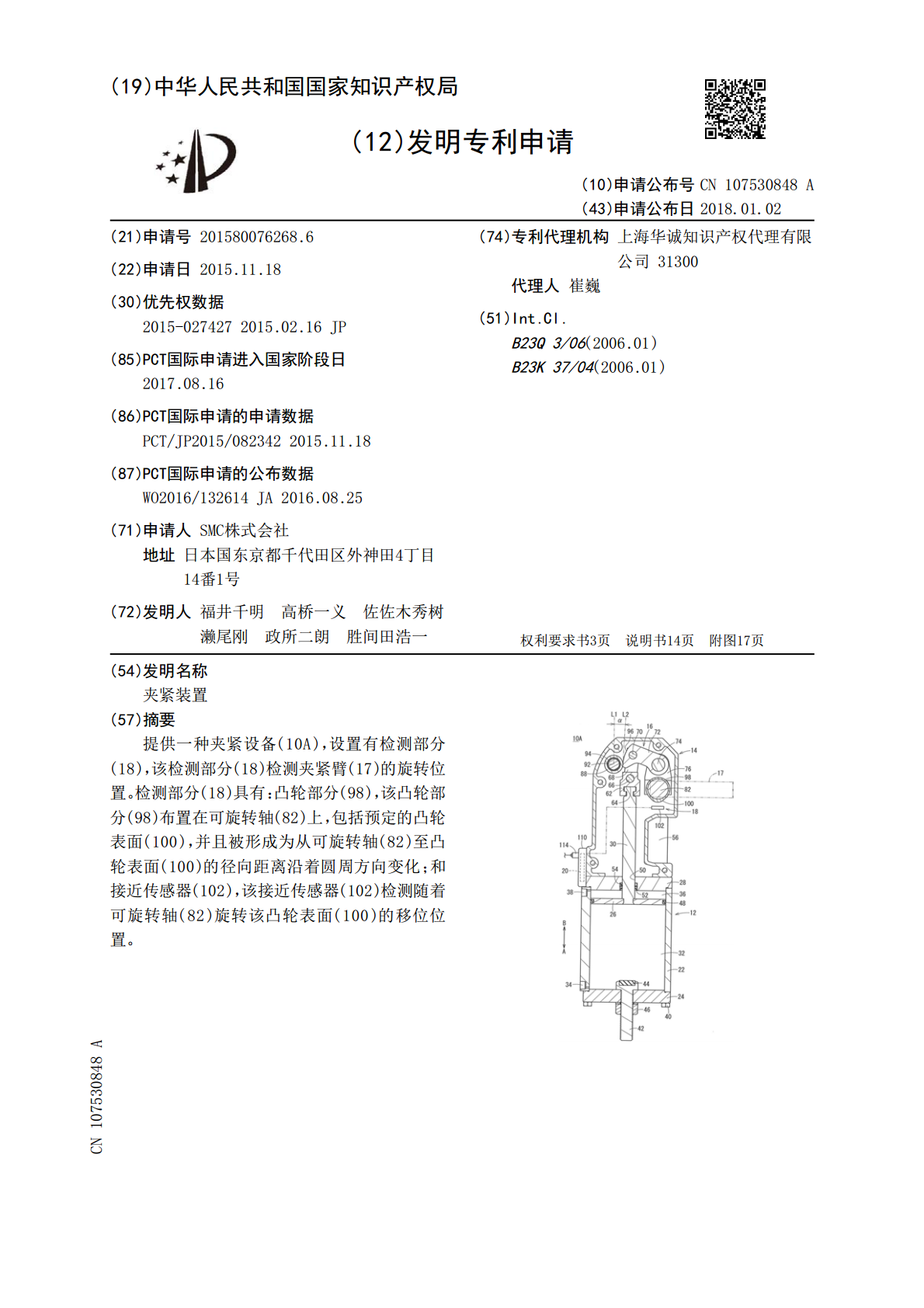
提供一种夹紧设备(10A),设置有检测部分(18),该检测部分(18)检测夹紧臂(17)的旋转位置。检测部分(18)具有:凸轮部分(98),该凸轮部分(98)布置在可旋转轴(82)上,包括预定的凸轮表面(100),并且被形成为从可旋转轴(82)至凸轮表面(100)的径向距离沿着圆周方向变化;和接近传感器(102),该接近传感器(102)检测随着可旋转轴(82)旋转该凸轮表面(100)的移位位置。
夹紧装置.pdf
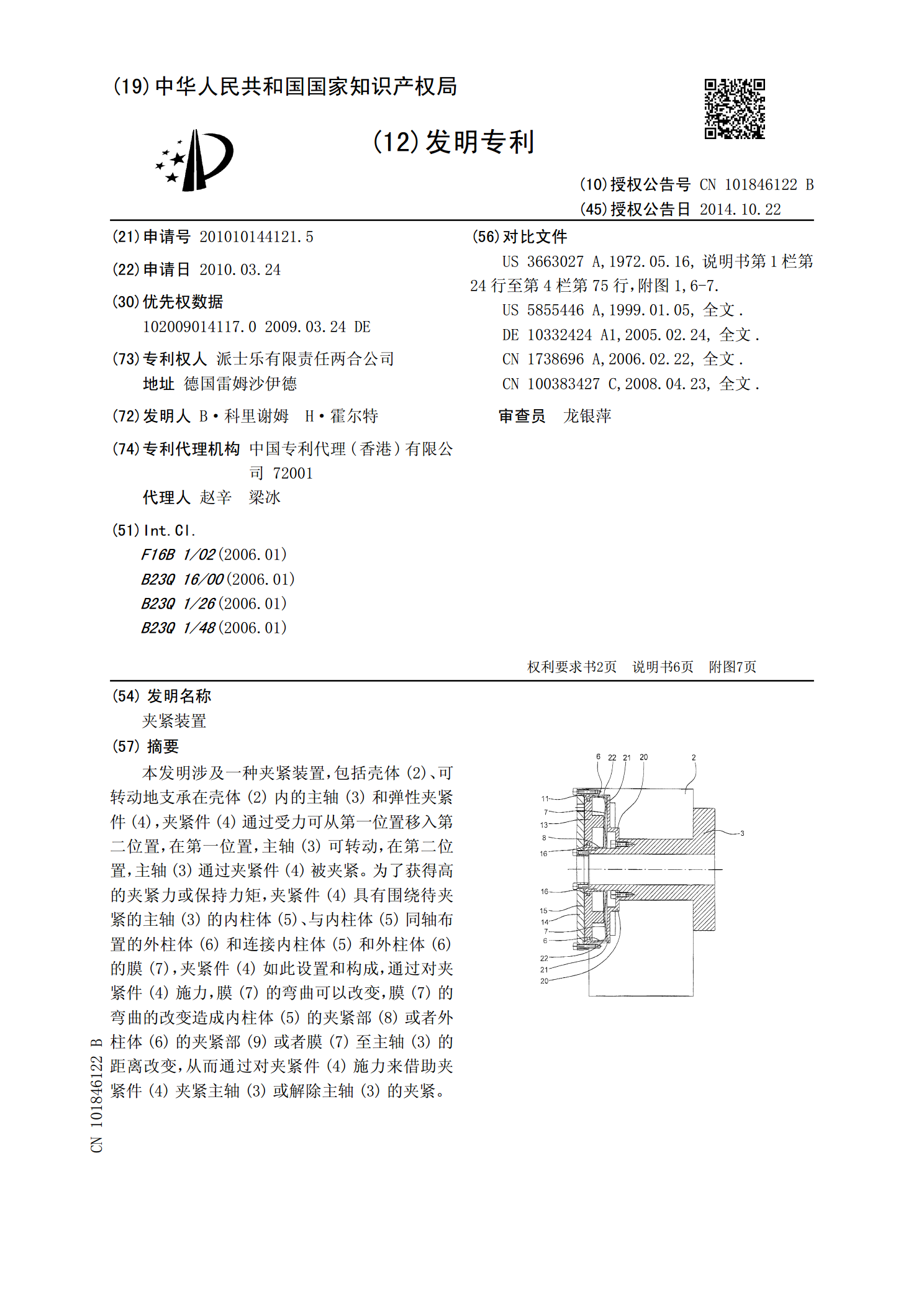
本发明涉及一种夹紧装置,包括壳体(2)、可转动地支承在壳体(2)内的主轴(3)和弹性夹紧件(4),夹紧件(4)通过受力可从第一位置移入第二位置,在第一位置,主轴(3)可转动,在第二位置,主轴(3)通过夹紧件(4)被夹紧。为了获得高的夹紧力或保持力矩,夹紧件(4)具有围绕待夹紧的主轴(3)的内柱体(5)、与内柱体(5)同轴布置的外柱体(6)和连接内柱体(5)和外柱体(6)的膜(7),夹紧件(4)如此设置和构成,通过对夹紧件(4)施力,膜(7)的弯曲可以改变,膜(7)的弯曲的改变造成内柱体(5)的夹紧部(8)
夹紧装置.pdf
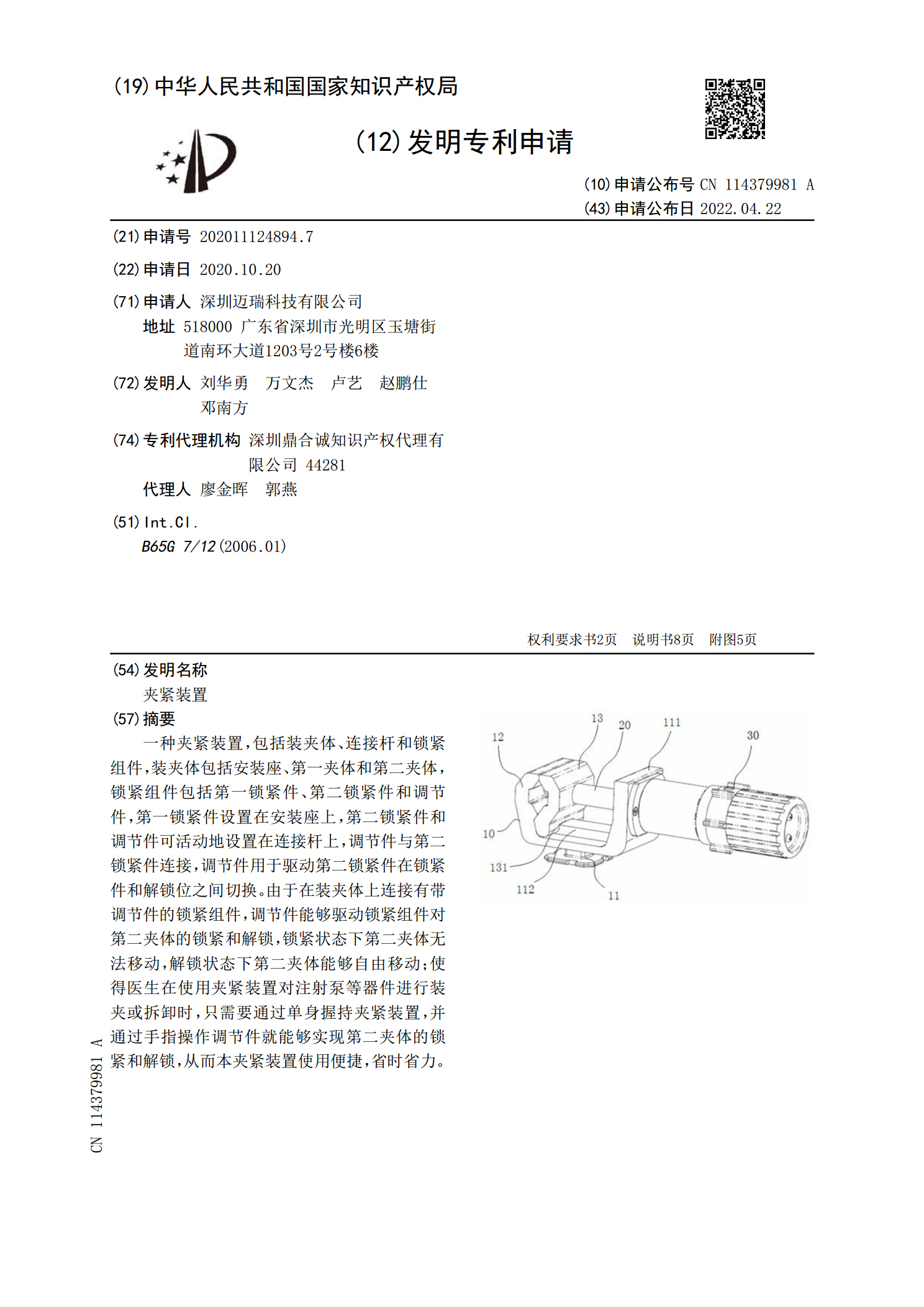
一种夹紧装置,包括装夹体、连接杆和锁紧组件,装夹体包括安装座、第一夹体和第二夹体,锁紧组件包括第一锁紧件、第二锁紧件和调节件,第一锁紧件设置在安装座上,第二锁紧件和调节件可活动地设置在连接杆上,调节件与第二锁紧件连接,调节件用于驱动第二锁紧件在锁紧件和解锁位之间切换。由于在装夹体上连接有带调节件的锁紧组件,调节件能够驱动锁紧组件对第二夹体的锁紧和解锁,锁紧状态下第二夹体无法移动,解锁状态下第二夹体能够自由移动;使得医生在使用夹紧装置对注射泵等器件进行装夹或拆卸时,只需要通过单身握持夹紧装置,并通过手指操作