
定子冲片和具有其的控制力矩陀螺用框架力矩电机.pdf

文阁****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定子冲片和具有其的控制力矩陀螺用框架力矩电机.pdf
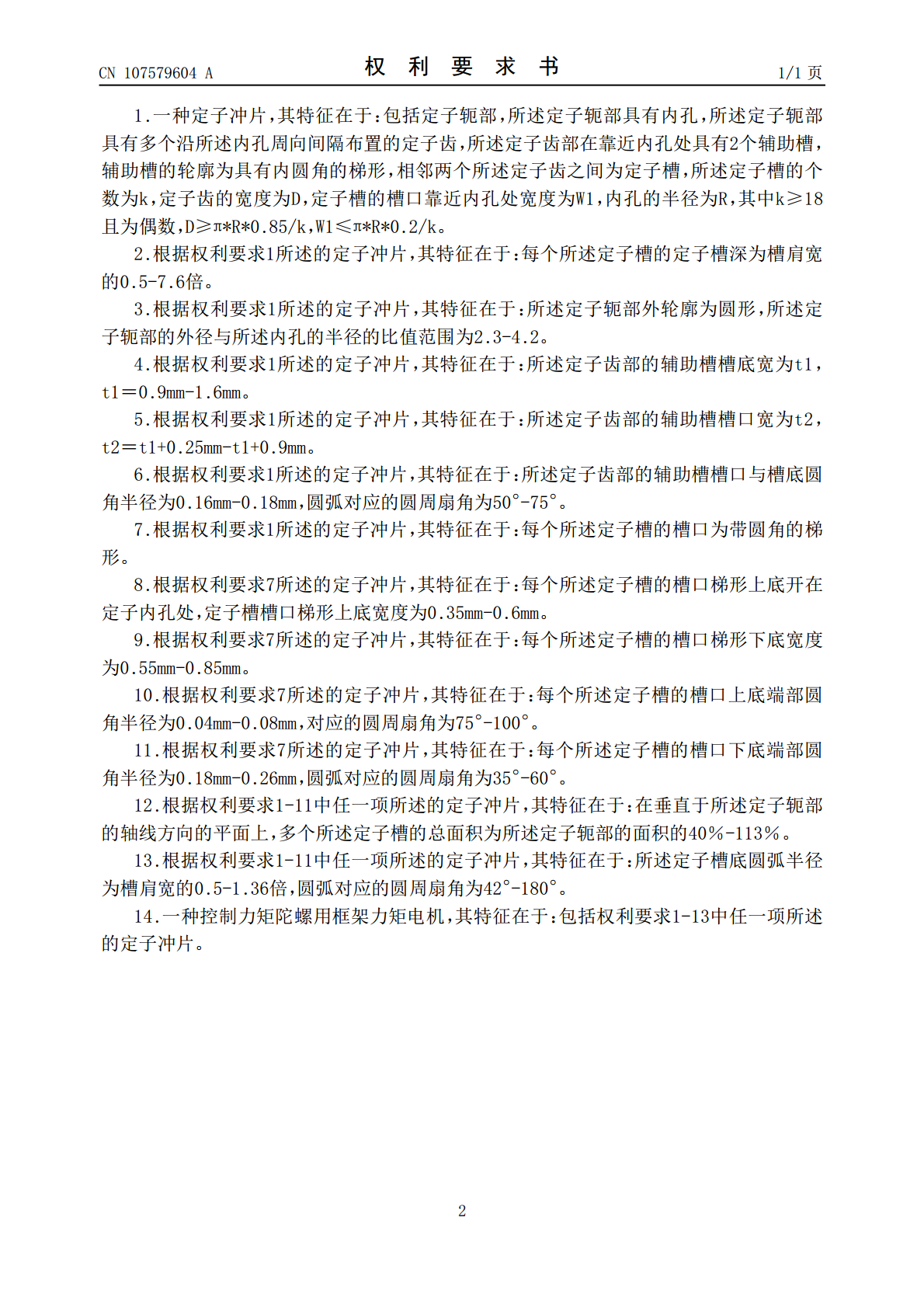
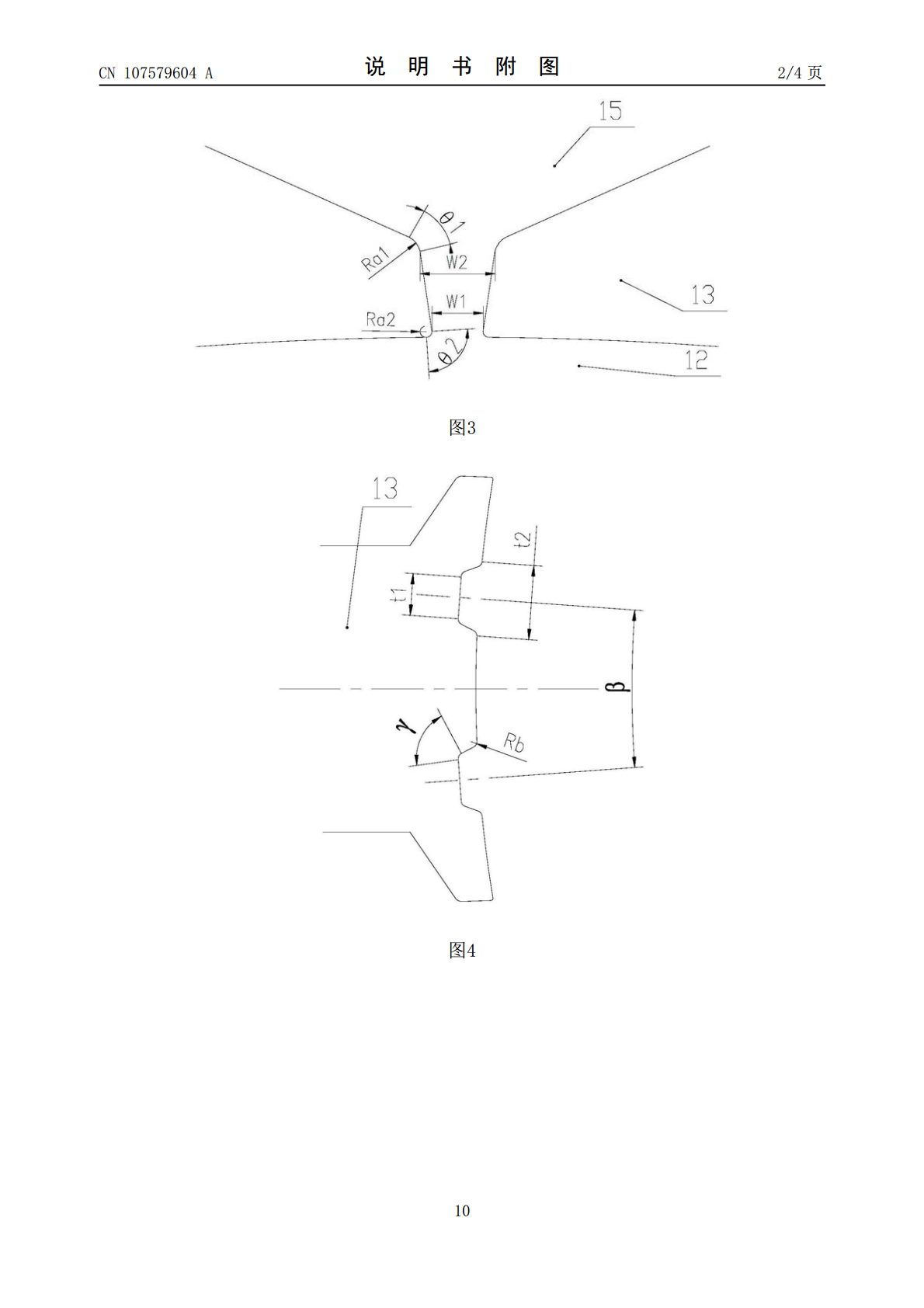
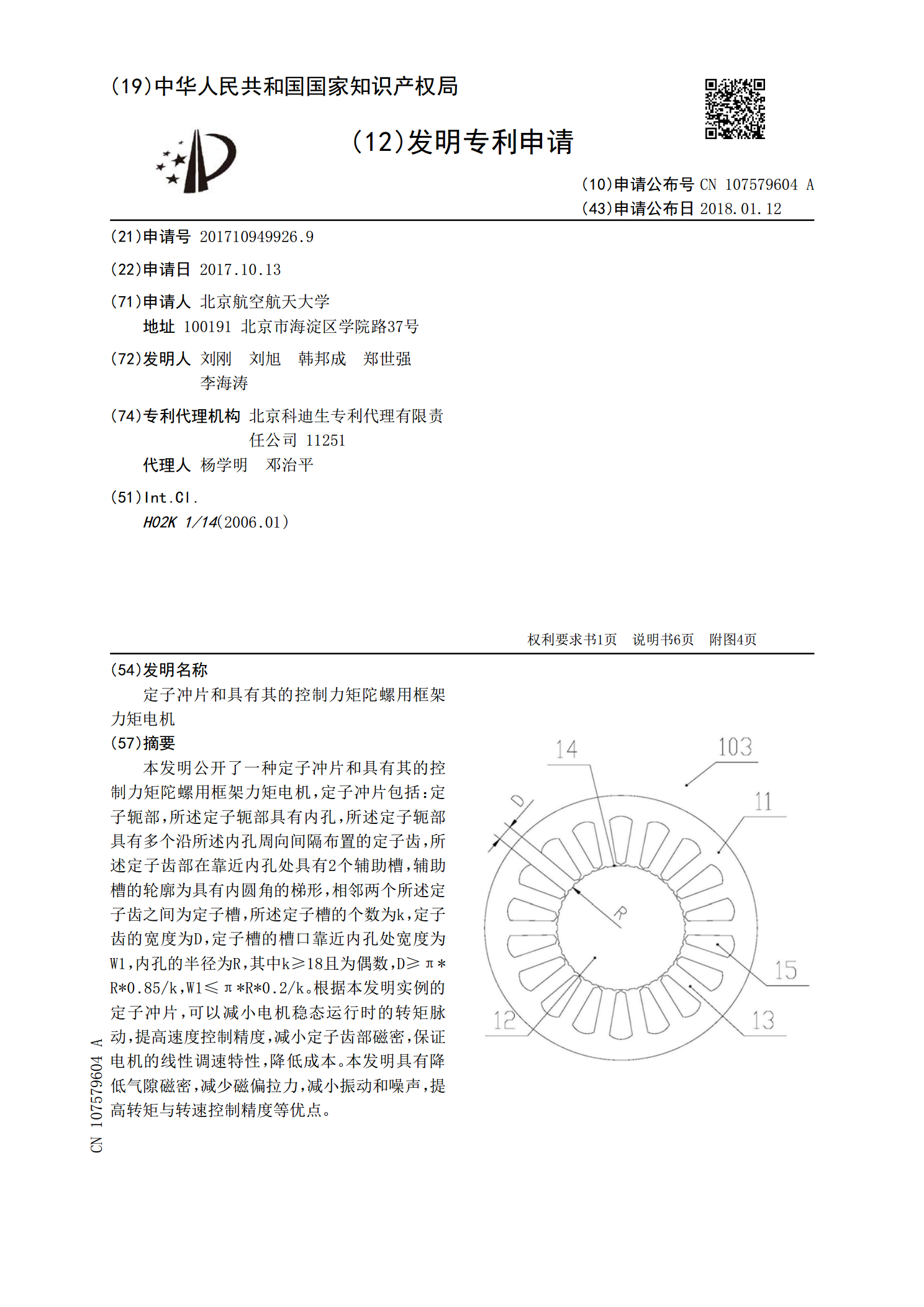
本发明公开了一种定子冲片和具有其的控制力矩陀螺用框架力矩电机,定子冲片包括:定子轭部,所述定子轭部具有内孔,所述定子轭部具有多个沿所述内孔周向间隔布置的定子齿,所述定子齿部在靠近内孔处具有2个辅助槽,辅助槽的轮廓为具有内圆角的梯形,相邻两个所述定子齿之间为定子槽,所述定子槽的个数为k,定子齿的宽度为D,定子槽的槽口靠近内孔处宽度为W1,内孔的半径为R,其中k≥18且为偶数,D≥π*R*0.85/k,W1≤π*R*0.2/k。根据本发明实例的定子冲片,可以减小电机稳态运行时的转矩脉动,提高速度控制精度,减小
一种定子冲片以及具有该冲片的定子铁芯和电机.pdf
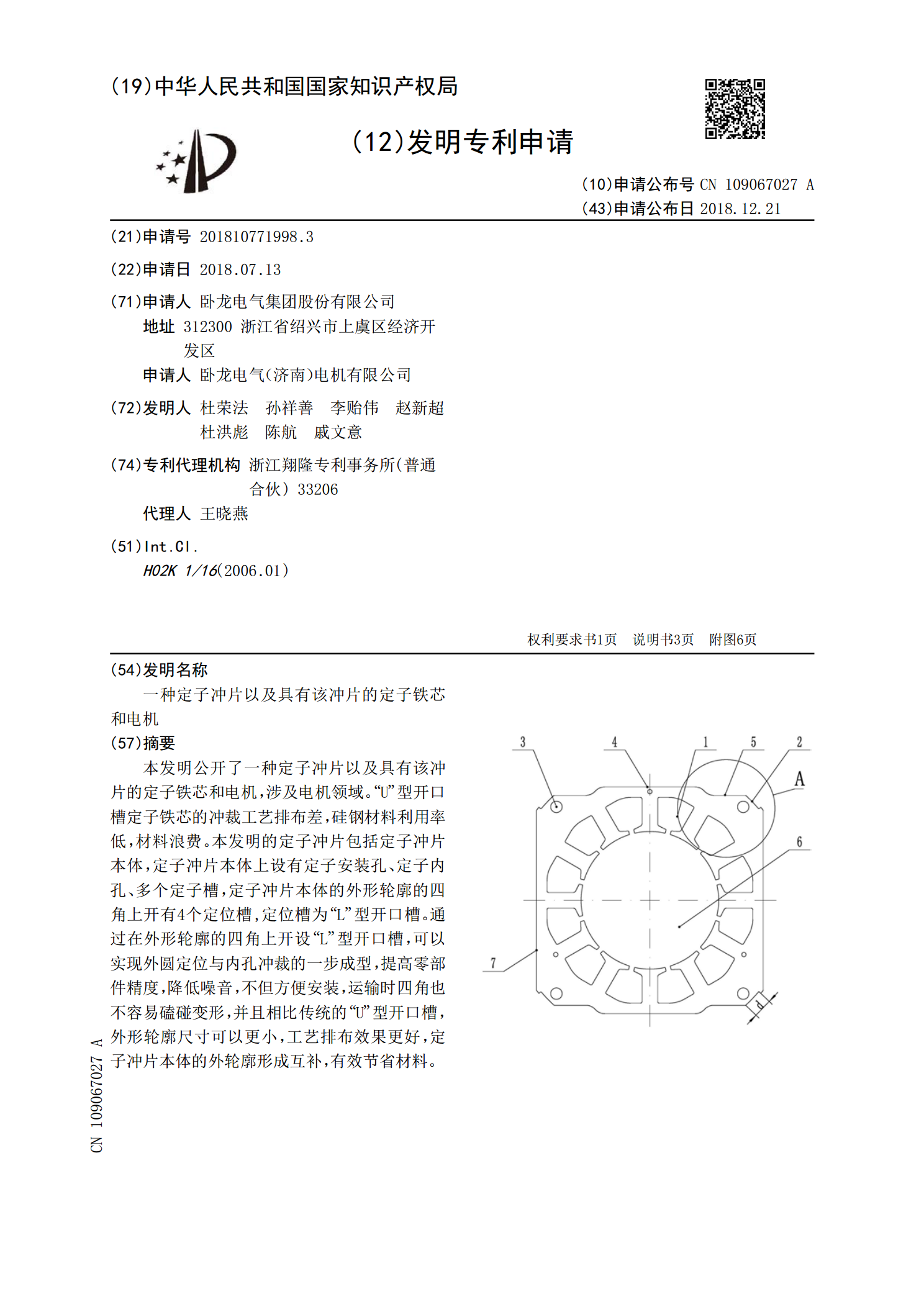
本发明公开了一种定子冲片以及具有该冲片的定子铁芯和电机,涉及电机领域。“U”型开口槽定子铁芯的冲裁工艺排布差,硅钢材料利用率低,材料浪费。本发明的定子冲片包括定子冲片本体,定子冲片本体上设有定子安装孔、定子内孔、多个定子槽,定子冲片本体的外形轮廓的四角上开有4个定位槽,定位槽为“L”型开口槽。通过在外形轮廓的四角上开设“L”型开口槽,可以实现外圆定位与内孔冲裁的一步成型,提高零部件精度,降低噪音,不但方便安装,运输时四角也不容易磕碰变形,并且相比传统的“U”型开口槽,外形轮廓尺寸可以更小,工艺排布效果更好
力矩电机定子铁芯叠压胎.pdf
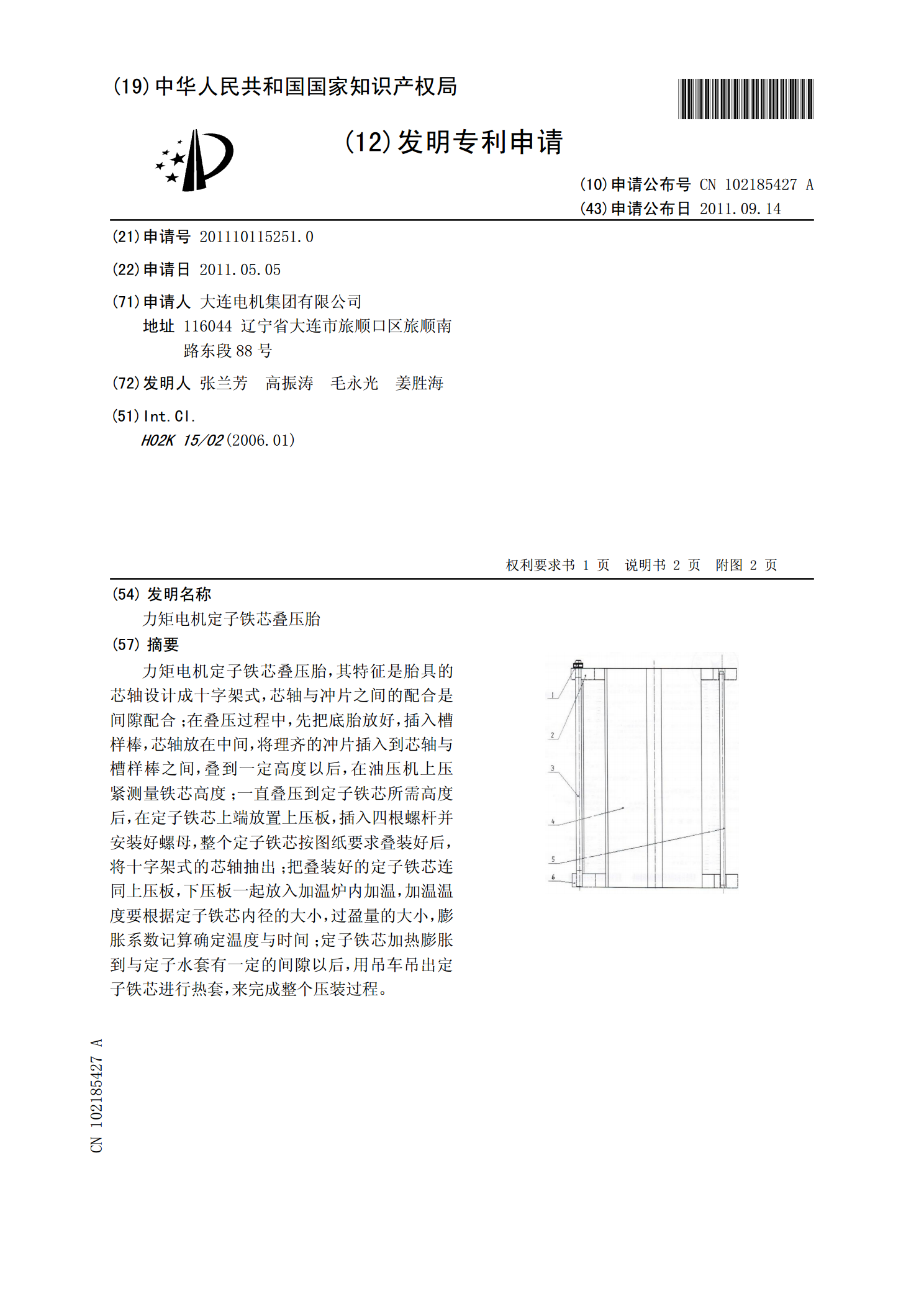
力矩电机定子铁芯叠压胎,其特征是胎具的芯轴设计成十字架式,芯轴与冲片之间的配合是间隙配合;在叠压过程中,先把底胎放好,插入槽样棒,芯轴放在中间,将理齐的冲片插入到芯轴与槽样棒之间,叠到一定高度以后,在油压机上压紧测量铁芯高度;一直叠压到定子铁芯所需高度后,在定子铁芯上端放置上压板,插入四根螺杆并安装好螺母,整个定子铁芯按图纸要求叠装好后,将十字架式的芯轴抽出;把叠装好的定子铁芯连同上压板,下压板一起放入加温炉内加温,加温温度要根据定子铁芯内径的大小,过盈量的大小,膨胀系数记算确定温度与时间;定子铁芯加热膨
定子冲片、定子组件、电子水泵及应用其的新能源汽车.pdf
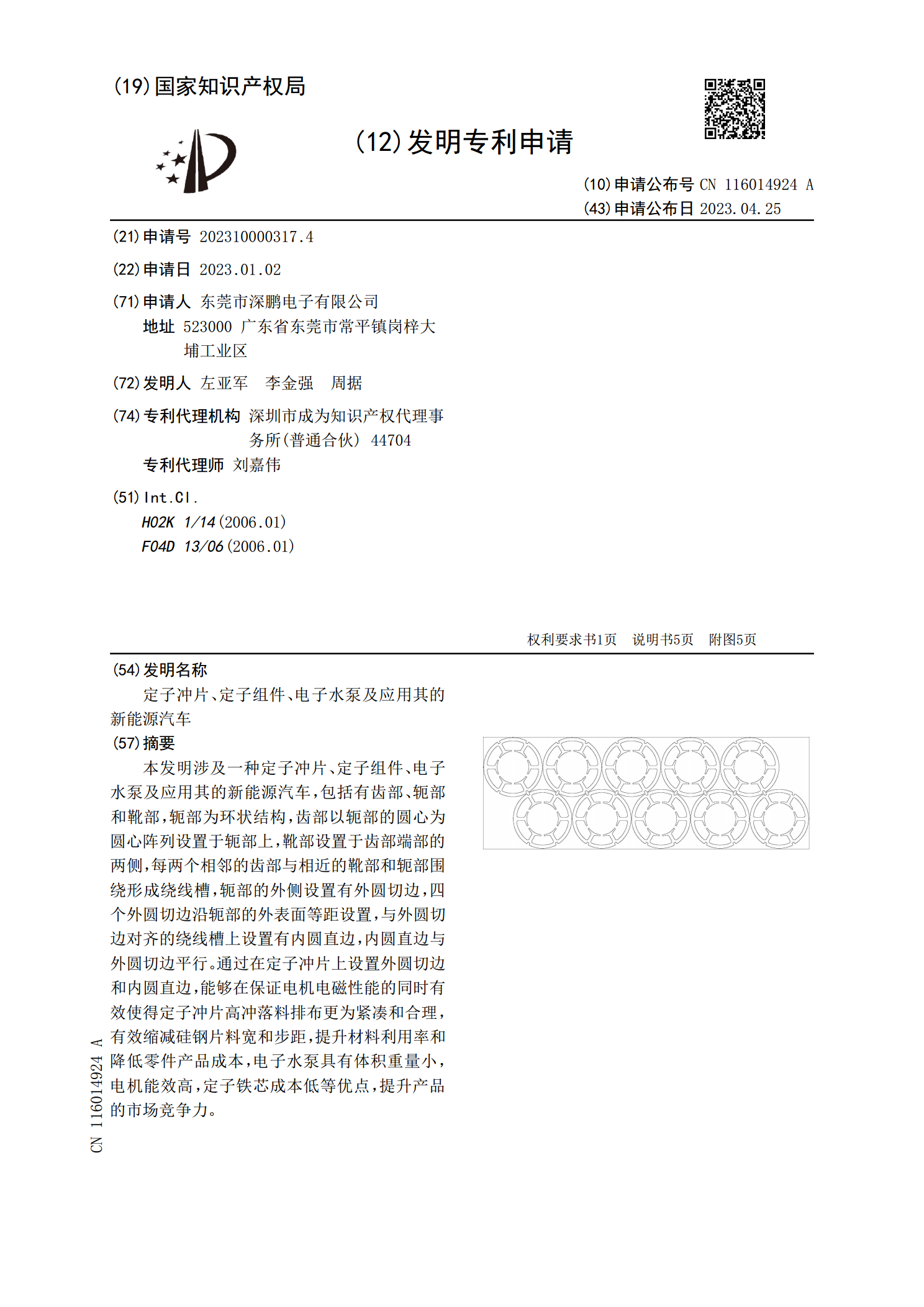
本发明涉及一种定子冲片、定子组件、电子水泵及应用其的新能源汽车,包括有齿部、轭部和靴部,轭部为环状结构,齿部以轭部的圆心为圆心阵列设置于轭部上,靴部设置于齿部端部的两侧,每两个相邻的齿部与相近的靴部和轭部围绕形成绕线槽,轭部的外侧设置有外圆切边,四个外圆切边沿轭部的外表面等距设置,与外圆切边对齐的绕线槽上设置有内圆直边,内圆直边与外圆切边平行。通过在定子冲片上设置外圆切边和内圆直边,能够在保证电机电磁性能的同时有效使得定子冲片高冲落料排布更为紧凑和合理,有效缩减硅钢片料宽和步距,提升材料利用率和降低零件产

单框架控制力矩陀螺的试验与应用.docx
单框架控制力矩陀螺的试验与应用单框架控制力矩陀螺的试验与应用摘要:力矩陀螺是一种重要的控制器,被广泛应用于机器人、航空航天等领域。本文主要研究单框架控制力矩陀螺的试验与应用。首先,介绍了力矩陀螺的基本原理和结构。然后,设计了一套实验系统,对单框架控制力矩陀螺进行了试验。最后,探讨了单框架控制力矩陀螺在机器人控制、飞行器姿态稳定等领域的应用。1.引言力矩陀螺是一种可以产生力矩的陀螺仪,通过控制陀螺仪的运动,可以实现对物体的姿态控制。力矩陀螺具有结构简单、功耗低、响应快等优点,被广泛应用于机器人、航空航天等领