
一种摆线针轮谐波传动装置.pdf

书生****22

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种摆线针轮谐波传动装置.pdf
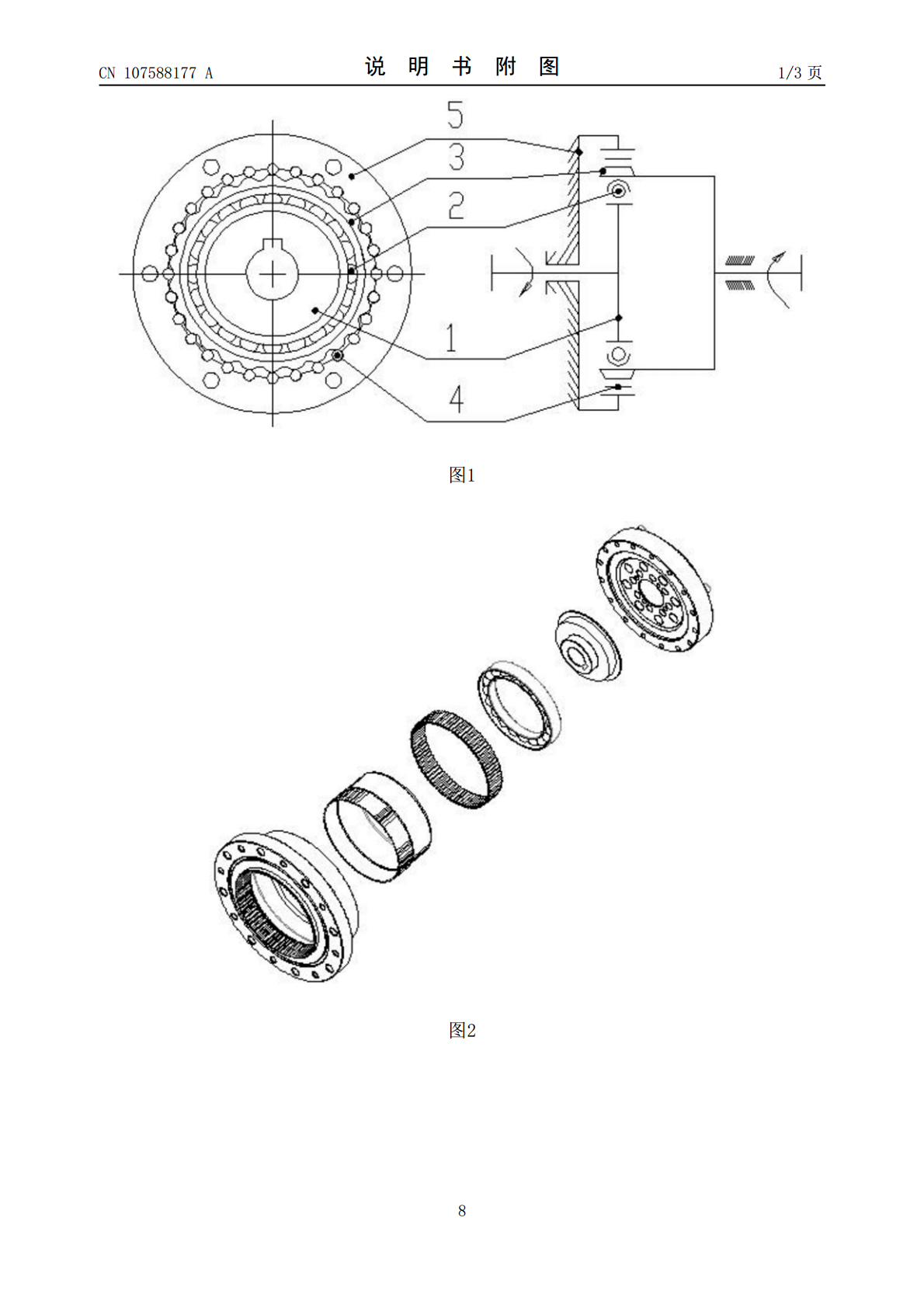
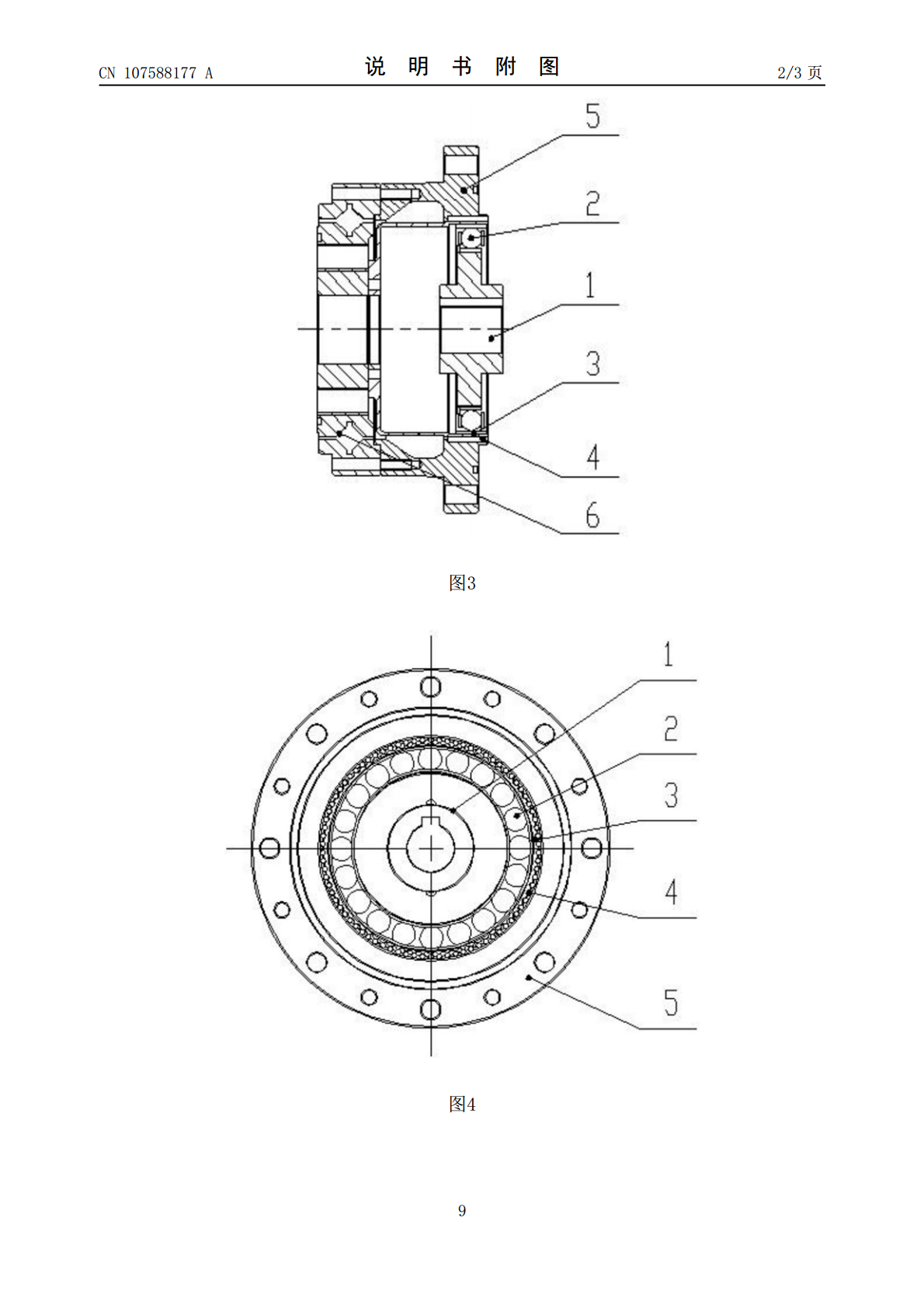
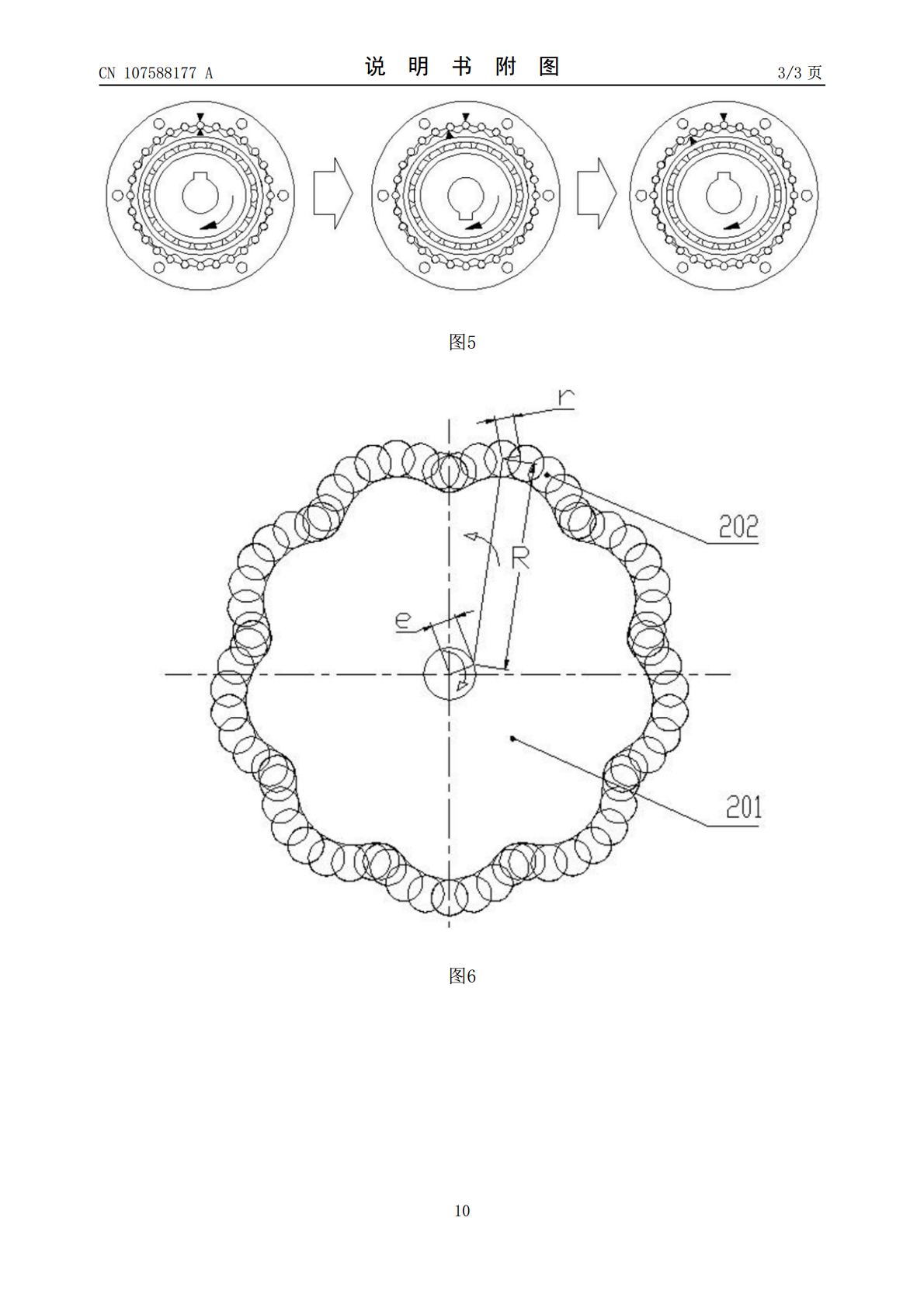
本发明公开了一种摆线针轮谐波传动装置,包括凸轮轴、柔性轴承、柔轮、滚针以及刚轮,柔性轴承安装在椭圆形的凸轮轴上,柔轮的内圈与柔性轴承的外圈相互配合的,柔轮的外齿面与每一根滚针相互接触,滚针均匀地分布在刚轮的半圆槽内,主轴承的内圈与柔轮固连在一起,主轴承的外圈与刚轮固连在一起。摆线针轮谐波传动齿高齿根都是摆线齿廓,减少了发生断裂失效的风险,不需要很深的啮合距离就可以获得很大的啮合量,齿宽较大,全部齿参与啮合,齿面比压小,可以承受很大的扭矩,所需的柔轮变形量也很小,可使柔轮的寿命和强度得到极大地提高。

摆线针轮传动装置的修形方法及摆线针轮传动装置.pdf
本发明涉及摆线针轮传动装置的修形方法及摆线针轮传动装置。摆线针轮传动装置包括壳体、摆线齿轮、针齿、弹簧及端盖,壳体在内侧壁开设有用于放置针齿的针齿槽,摆线齿轮放置在壳体中心,针齿放置于针齿槽内,且针齿同时与摆线齿轮及针齿槽接触,针齿为圆台形针齿,针齿槽内表面为倾斜圆柱面,端盖连接在壳体上,弹簧设置在各针齿的大端面与端盖之间,针齿的锥度角满足:μ为针齿槽与针齿相接触表面的摩擦系数,针齿槽圆柱面的倾斜角度θ角等于针齿的锥度。与现有技术相比,本发明能够弥补制造误差和工作磨损带来的摆线齿轮与针齿之间的间隙缺陷,能

谐波齿轮与摆线针轮ppt课件.ppt
谐波齿轮传动与摆线针轮传动一、谐波齿轮传动1.结构:谐波齿轮传动构成图例:.2.运动原理:谐波齿轮传动中,刚轮的齿数zG略大于柔轮的齿数zR。谐波齿轮的齿数差应等于波数或波数的整数倍。波发生器的长度比未变形的柔轮内圆直径大:当波发生器装入柔轮内圆时,迫使柔轮产生弹性变形而呈椭圆状,使其长轴处柔轮轮齿插入刚轮的轮齿槽内,成为完全啮合状态;而其短轴处两轮轮齿完全不接触,处于脱开状态。由啮合到脱开的过程之间则处于啮出或啮入状态。当波发生器连续转动时:迫使柔轮不断产生变形,使两轮轮齿在进行啮入、啮合、啮出、脱开的
一种可调式变齿厚摆线针轮传动装置.pdf
本发明一种可调式变齿厚摆线针轮传动装置,它包括壳体、端面轴承、曲轴、针齿和针齿壳,还包括变齿厚摆线轮和弹簧,变齿厚摆线轮的轮廓面为锥形面;变齿厚摆线轮中心孔与曲轴的偏心轴段组合装配,曲轴两端对应装入壳体中心孔和针齿壳中心孔的轴承上,针齿放置于针齿壳内的针齿槽,针齿同时与变齿厚摆线轮和针齿壳的针齿槽接触,弹簧套装在曲轴上,变齿厚摆线轮由弹簧轴向预紧。本发明具有以下技术效果:不需对变齿厚摆线轮进行齿廓修形,且能够使摆线针轮传动装置中所有针齿都与摆线轮保持接触,实现无侧隙啮合,零回差,还能够自动消除因工作磨损造
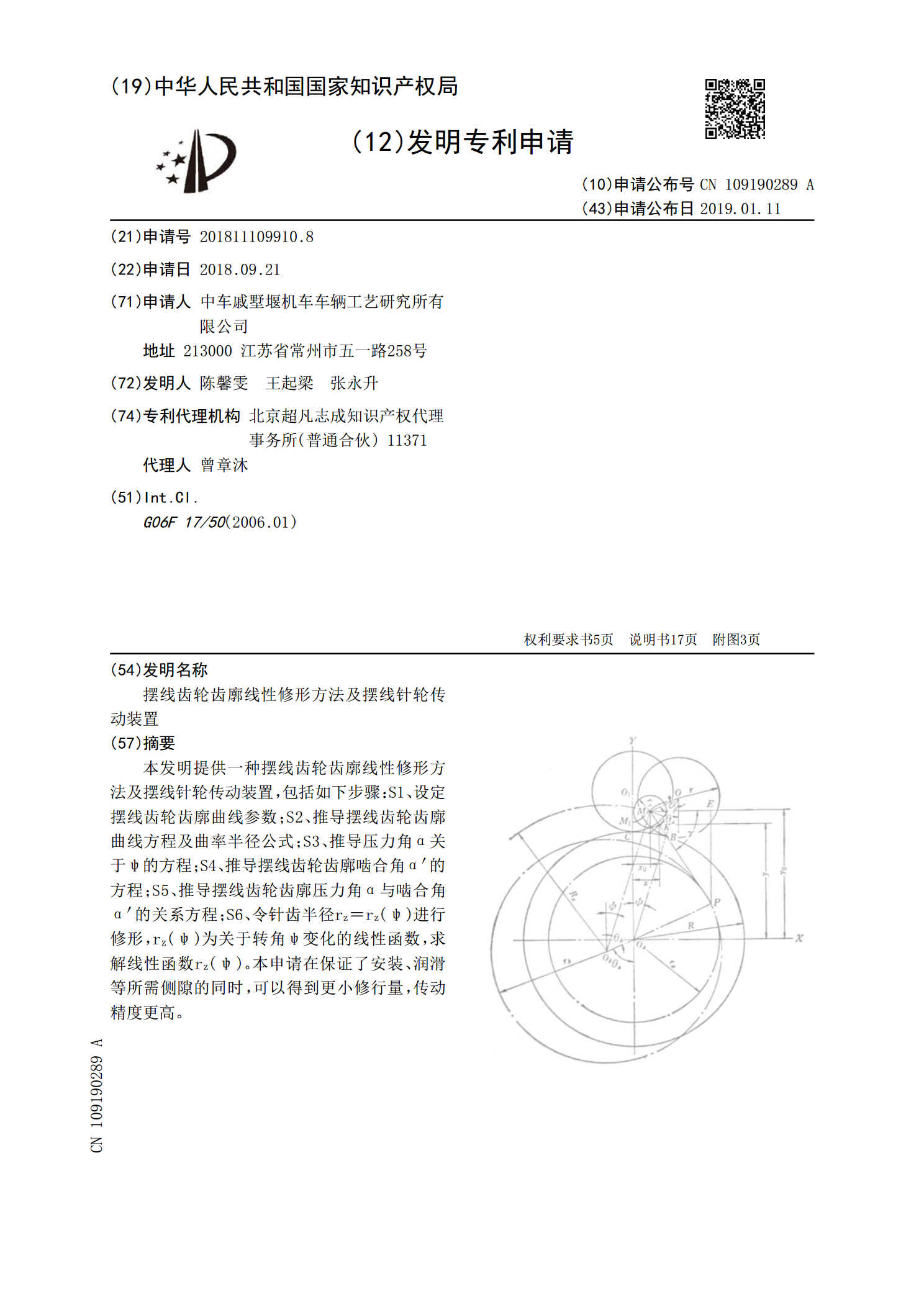
摆线齿轮齿廓线性修形方法及摆线针轮传动装置.pdf
本发明提供一种摆线齿轮齿廓线性修形方法及摆线针轮传动装置,包括如下步骤:S1、设定摆线齿轮齿廓曲线参数;S2、推导摆线齿轮齿廓曲线方程及曲率半径公式;S3、推导压力角α关于ψ的方程;S4、推导摆线齿轮齿廓啮合角α′的方程;S5、推导摆线齿轮齿廓压力角α与啮合角α′的关系方程;S6、令针齿半径r