
一种非接触式城轨车辆轮对尺寸在线检测方法.pdf

灵波****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非接触式城轨车辆轮对尺寸在线检测方法.pdf
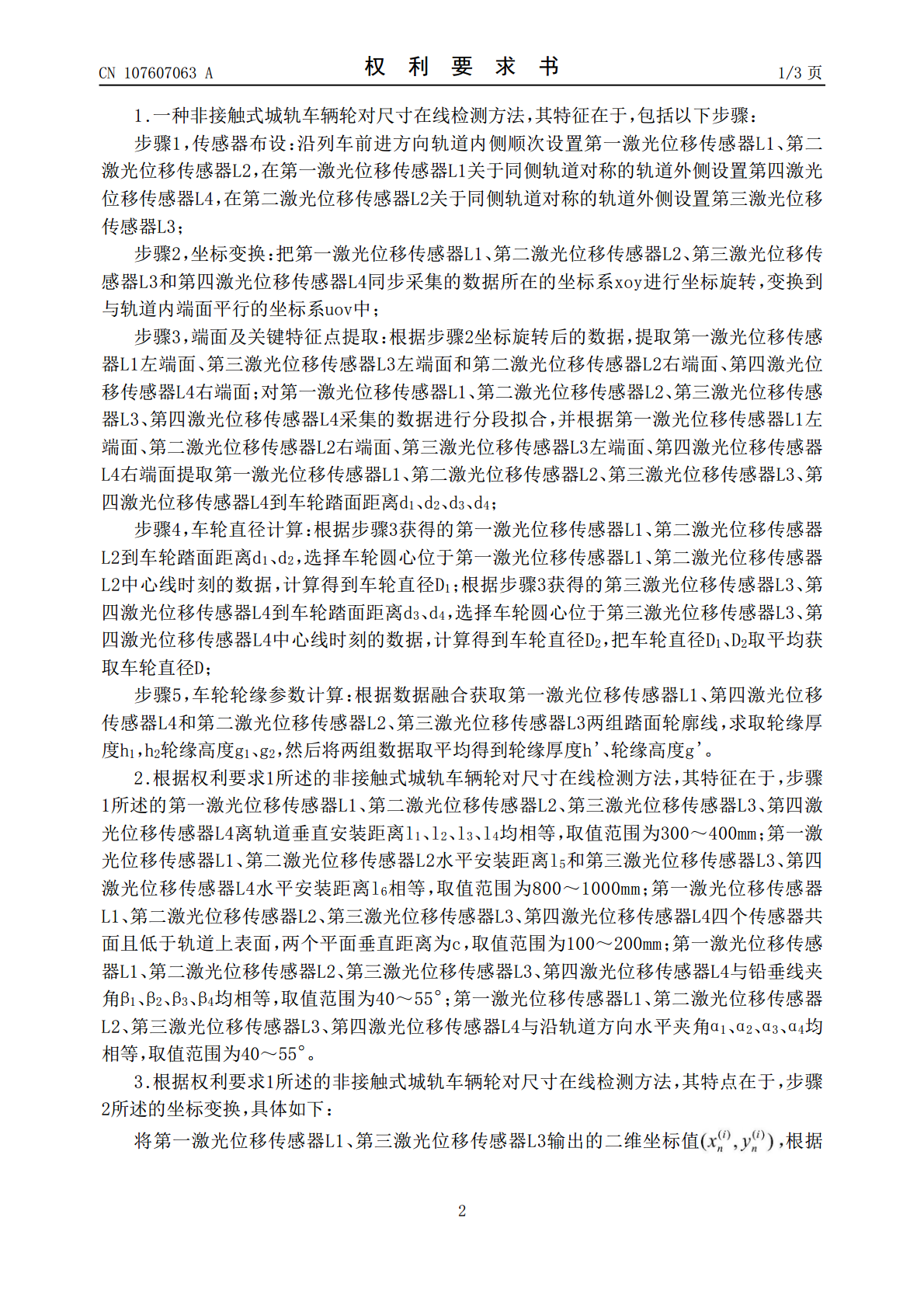
本发明公开了一种非接触式城轨车辆轮对尺寸在线检测方法。该方法为:沿列车前进方向轨道内侧依次安装第一、第二激光位移传感器,轨道外侧依次安装第四、第三激光位移传感器,且第一、第四激光位移传感器关于轨道对称设置,第二、第三激光位移传感器关于轨道对称设置;首先将激光位移传感器采集的二维数据点经过坐标旋转、端面及特征点提取,获取车轮圆心分别位于第一、第二激光位移传感器中心线和第三、第四激光位移传感器中心线时激光位移传感器到车轮踏面的距离;然后根据几何关系求出两组直径,得到车轮直径均值;最后通过数据融合获取两组车轮踏

一种非接触式轮对尺寸在线检测方法及系统.pdf
本发明公开一种非接触式轮对尺寸在线检测方法及系统,即沿轨道外侧、内侧分别设置2D激光位移传感器、1D激光位移传感器,沿轨道设置测速传感器,在同一轨道两侧按几何关系布置两个激光对射传感器,传感器分别探测获取轮缘顶点的部分踏面轮廓线、到轨道内侧车轮端面的距离、车轮通过的速度,两个激光对射传感器检测轮缘顶点所在圆的弦长;通过提取车轮通过检测系统的部分踏面轮廓线和1D激光位移传感器到轨道内侧车轮端面的距离按几何关系算出轮缘高和轮缘厚;通过提取两个激光对射传感器处轮缘顶点圆的弦长,得到车轮轮缘顶点所在圆的直径,用轮
基于激光位移传感器的非接触式轮对尺寸在线检测方法.pdf
本发明公开了一种基于激光位移传感器的非接触式轮对尺寸在线检测方法。该方法包括以下步骤:沿列车前进方向轨道内侧顺次设置第一、第二激光位移传感器,关于轨道对称的外侧顺次设置第四、第三激光位移传感器;第一、第二激光位移传感器的激光源均与轨道上表面处于同一平面;将激光位移传感器输出的数据点进行坐标变换,提取端面及关键特征点;找到车轮圆心位于第一、第二激光位移传感器中心线时激光位移传感器到车轮踏面距离,根据几何关系计算车轮直径;通过数据融合获取两组车轮踏面轮廓线,进而得出两组轮缘参数均值。本发明具有结构简单、精度高
基于多种传感器的非接触式轮对尺寸在线检测方法和装置.pdf
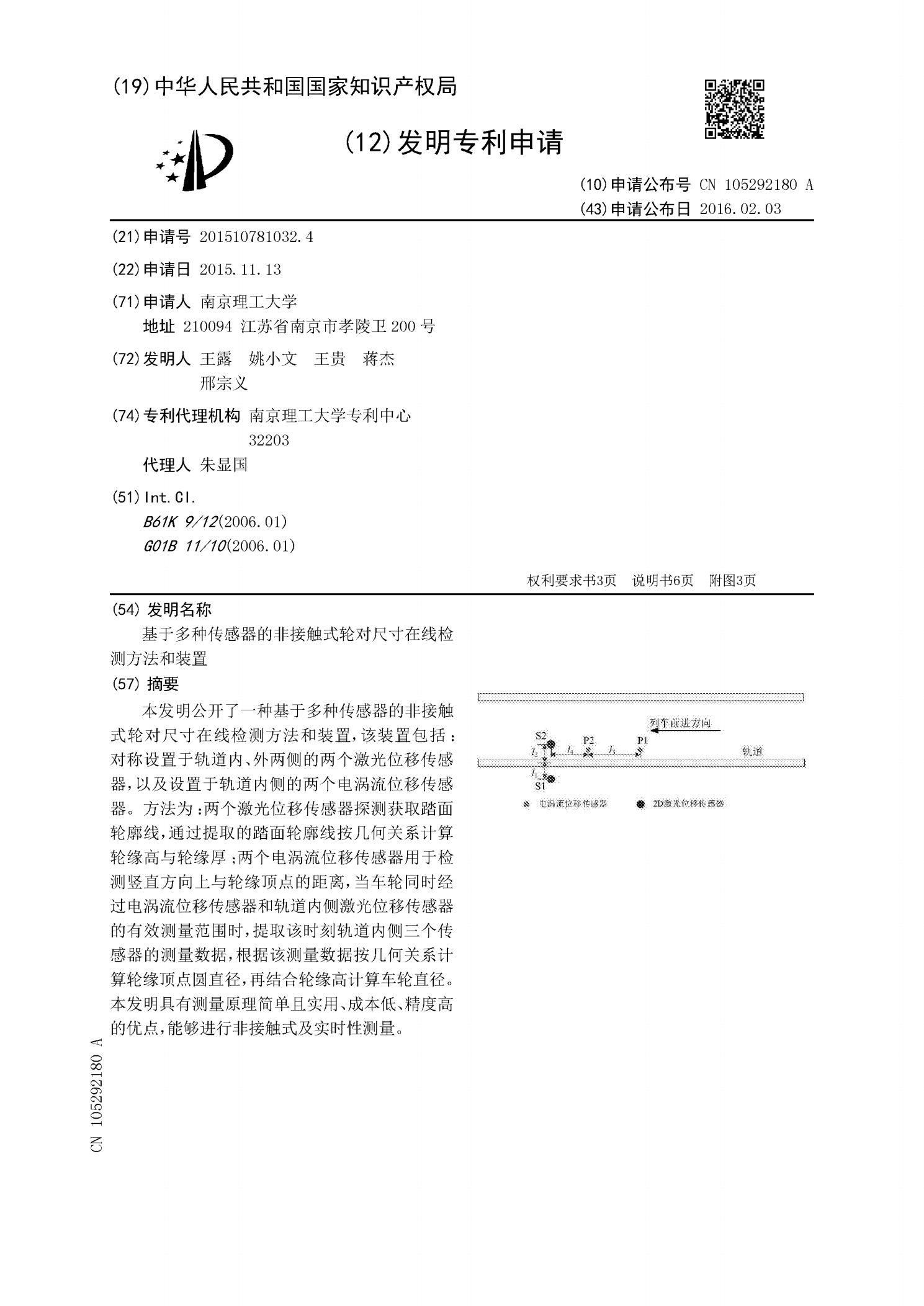
本发明公开了一种基于多种传感器的非接触式轮对尺寸在线检测方法和装置,该装置包括:对称设置于轨道内、外两侧的两个激光位移传感器,以及设置于轨道内侧的两个电涡流位移传感器。方法为:两个激光位移传感器探测获取踏面轮廓线,通过提取的踏面轮廓线按几何关系计算轮缘高与轮缘厚;两个电涡流位移传感器用于检测竖直方向上与轮缘顶点的距离,当车轮同时经过电涡流位移传感器和轨道内侧激光位移传感器的有效测量范围时,提取该时刻轨道内侧三个传感器的测量数据,根据该测量数据按几何关系计算轮缘顶点圆直径,再结合轮缘高计算车轮直径。本发明具

一种小型化城轨轮对尺寸在线检测装置及方法.pdf
本发明公开了一种小型化城轨轮对尺寸在线检测装置及方法。该装置包括激光位移传感器、步进电机滑动导轨、安装架、限位柱、固定架、垫块、变磁吸附机构、蓝牙装置、电机驱动器和移动电源;其中固定架顶端设置安装架,中端设置限位柱,底端两侧分别设置垫块和变磁吸附机构;安装架一侧与步进电机滑动导轨相连,另一侧设置蓝牙装置、电机驱动器和移动电源;步进电机滑动导轨上设置激光位移传感器。方法为:建立平面直角坐标系;将小型化城轨轮对尺寸在线检测装置吸附在待测轮对内侧;使用步进电机滑动导轨带动激光位移传感器,沿轮对轴线方向扫描轮对表