
指针式智能陀飞轮手表.pdf

黛娥****ak


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
指针式智能陀飞轮手表.pdf
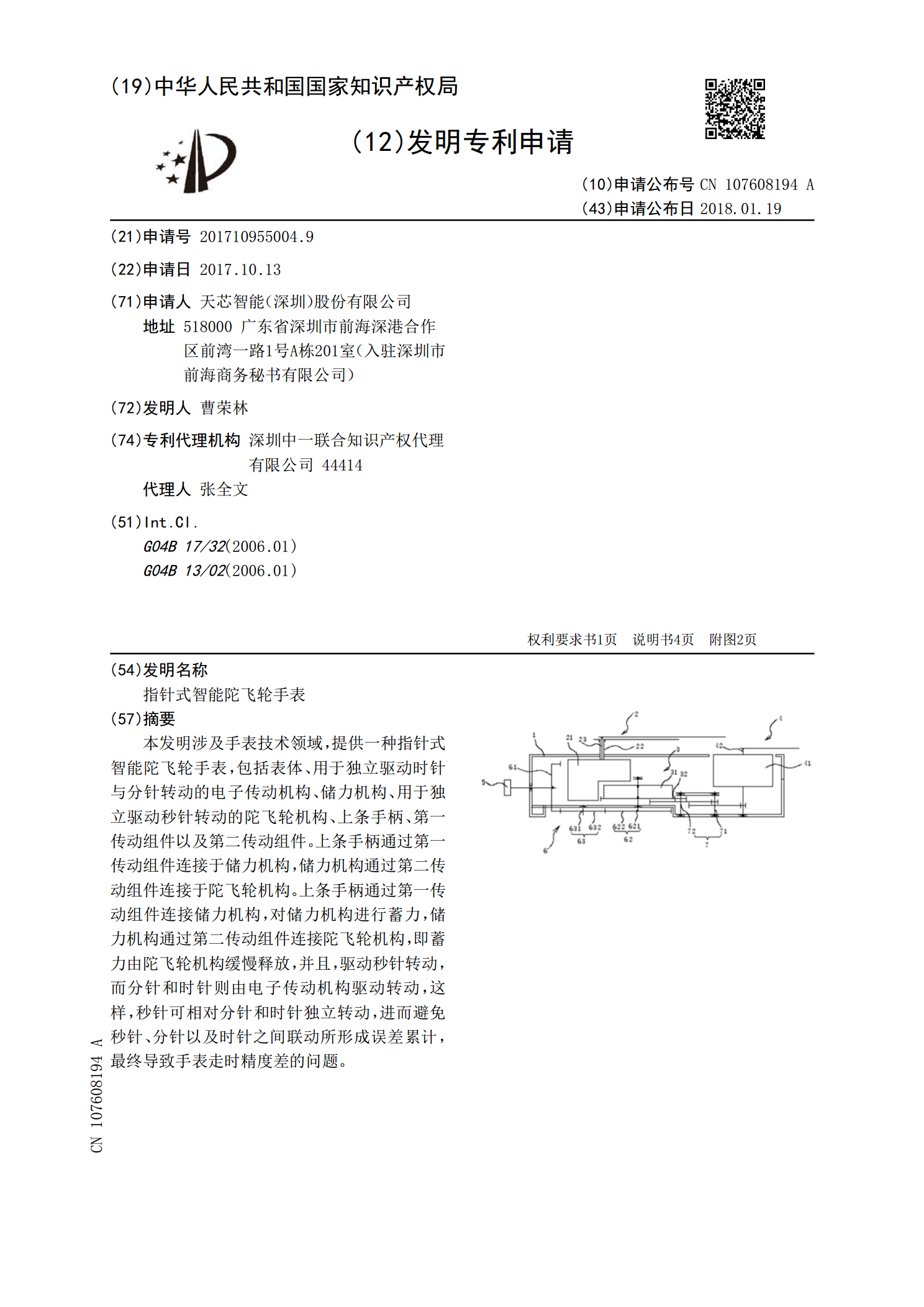
本发明涉及手表技术领域,提供一种指针式智能陀飞轮手表,包括表体、用于独立驱动时针与分针转动的电子传动机构、储力机构、用于独立驱动秒针转动的陀飞轮机构、上条手柄、第一传动组件以及第二传动组件。上条手柄通过第一传动组件连接于储力机构,储力机构通过第二传动组件连接于陀飞轮机构。上条手柄通过第一传动组件连接储力机构,对储力机构进行蓄力,储力机构通过第二传动组件连接陀飞轮机构,即蓄力由陀飞轮机构缓慢释放,并且,驱动秒针转动,而分针和时针则由电子传动机构驱动转动,这样,秒针可相对分针和时针独立转动,进而避免秒针、分针
陀飞轮和带陀飞轮的表.pdf
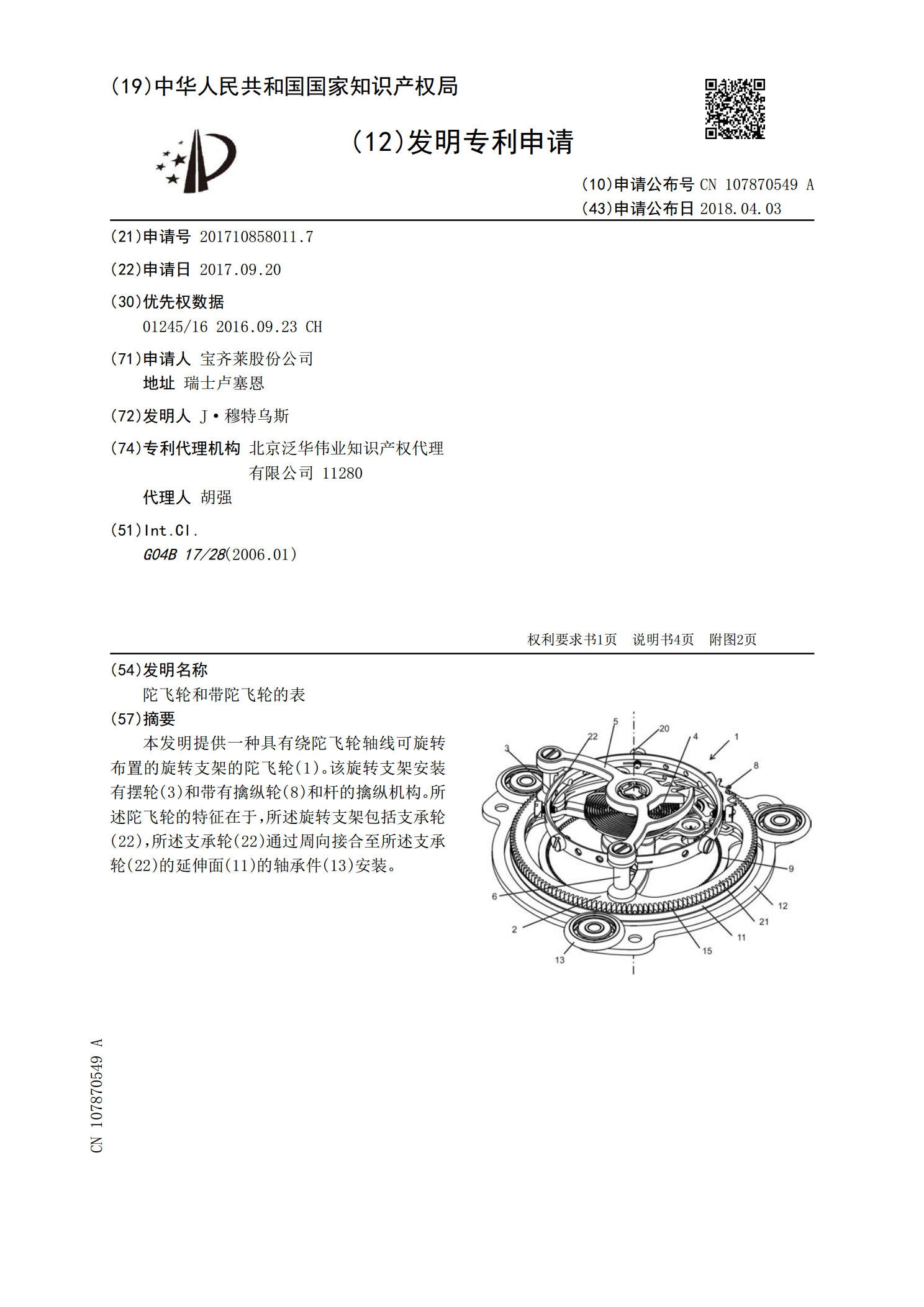
本发明提供一种具有绕陀飞轮轴线可旋转布置的旋转支架的陀飞轮(1)。该旋转支架安装有摆轮(3)和带有擒纵轮(8)和杆的擒纵机构。所述陀飞轮的特征在于,所述旋转支架包括支承轮(22),所述支承轮(22)通过周向接合至所述支承轮(22)的延伸面(11)的轴承件(13)安装。

一种浮动旋转陀飞轮机械手表.pdf
本发明公开了一种浮动旋转陀飞轮机械手表,包括上条系、基础系A、拨针系、过渡系B和旋转系C;基础系A包括原动系、显示系和传动轮系;过渡系B包含滚珠支架部件和行星轮系;旋转系C包含传动轮系和旋转擒纵调速机构;上条系、原动系以及显示系依次连接;拨针系与显示系连接;显示系与基础系A包括的传动轮系、过渡系B包括的行星轮系与滚珠支架部件、旋转系C包含的传动轮系与旋转擒纵调速机构依次双向连接。有益效果是:由于太阳轮为摩擦结构,通过片簧在夹板与太阳轮之间弹性变形实现摩擦功能,拨针轮系直接带动太阳轮,从而调整旋转支架位置,

一种机械手表的悬浮式陀飞轮结构.pdf
本发明公开一种机械手表的悬浮式陀飞轮结构,其中主传动轮系中三轮片经四轮部件、五轮部件至秒齿轴,差动轮系中太阳轮经差动一轮部件、差动二轮部件至秒齿轴;转盘底板与滚珠轴承部件外环固定为一体,转盘底板能够沿滚珠轴承部件轴心线灵活转动;秒轴轴部件穿过行星中心轮安装在转盘底板宝石轴承上,行星中心轮松套在秒轮轴末端,陀飞轮机构固定在秒轮轴上。有益效果是:转盘底板能够随手的活动顺时针或逆时针转动,安装在秒齿轴上的陀飞轮也随之一起转动,不在受现有技术中转盘按照固定周期、固定方向转动的限制;同时,差动机构克服了转盘自由转动

可变换陀飞轮位置的机械手表机芯的设计方法及手表机芯.pdf
本发明公开一种可变换陀飞轮位置的机械手表机芯,包括机芯原动系、传动轮系,陀飞轮系、显示系、拨针系、上条系整体布局设计及对夹板的具体设计;陀飞轮系和原动系在表机12点位置和6点位置对称设计,陀飞轮系和原动系能够在表机的12点位置或6点位置之间互换安装;陀飞轮机械手表机芯原动系通过主传动系为陀飞轮系补充能量。有益效果是:由于陀飞轮系和原动系呈表机12点位和6点位对称设计,因此,陀飞轮系和原动系可以互换位置来实现陀飞轮位置的互换,实现一个陀飞轮表机的零件装配出两种不同位置的陀飞轮机芯;另外,其它部件根据陀飞轮位