
基于Creo、ADAMS环境的弧面分度凸轮机构运动学仿真方法.pdf

王秋****哥哥

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于Creo、ADAMS环境的弧面分度凸轮机构运动学仿真方法.pdf
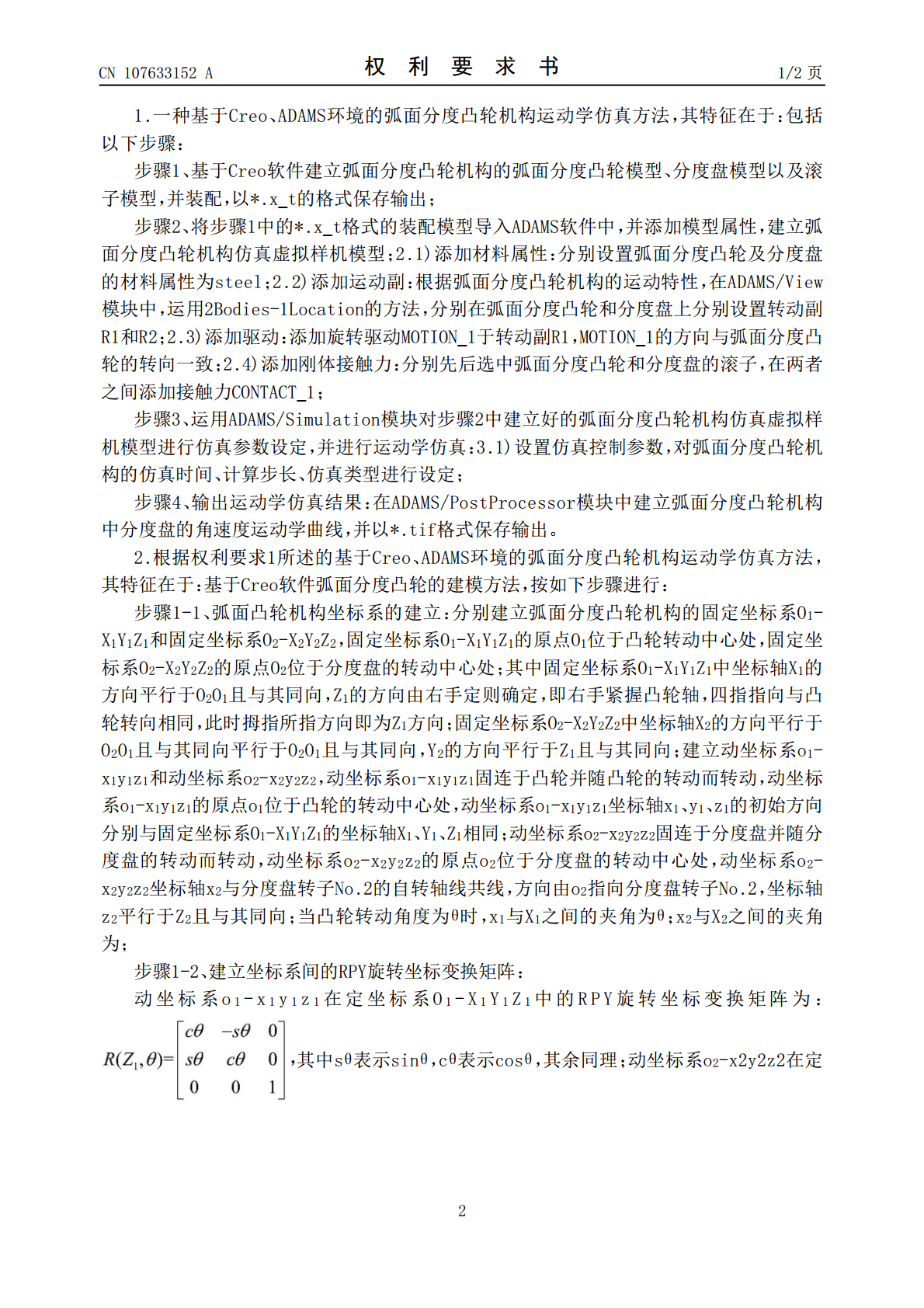
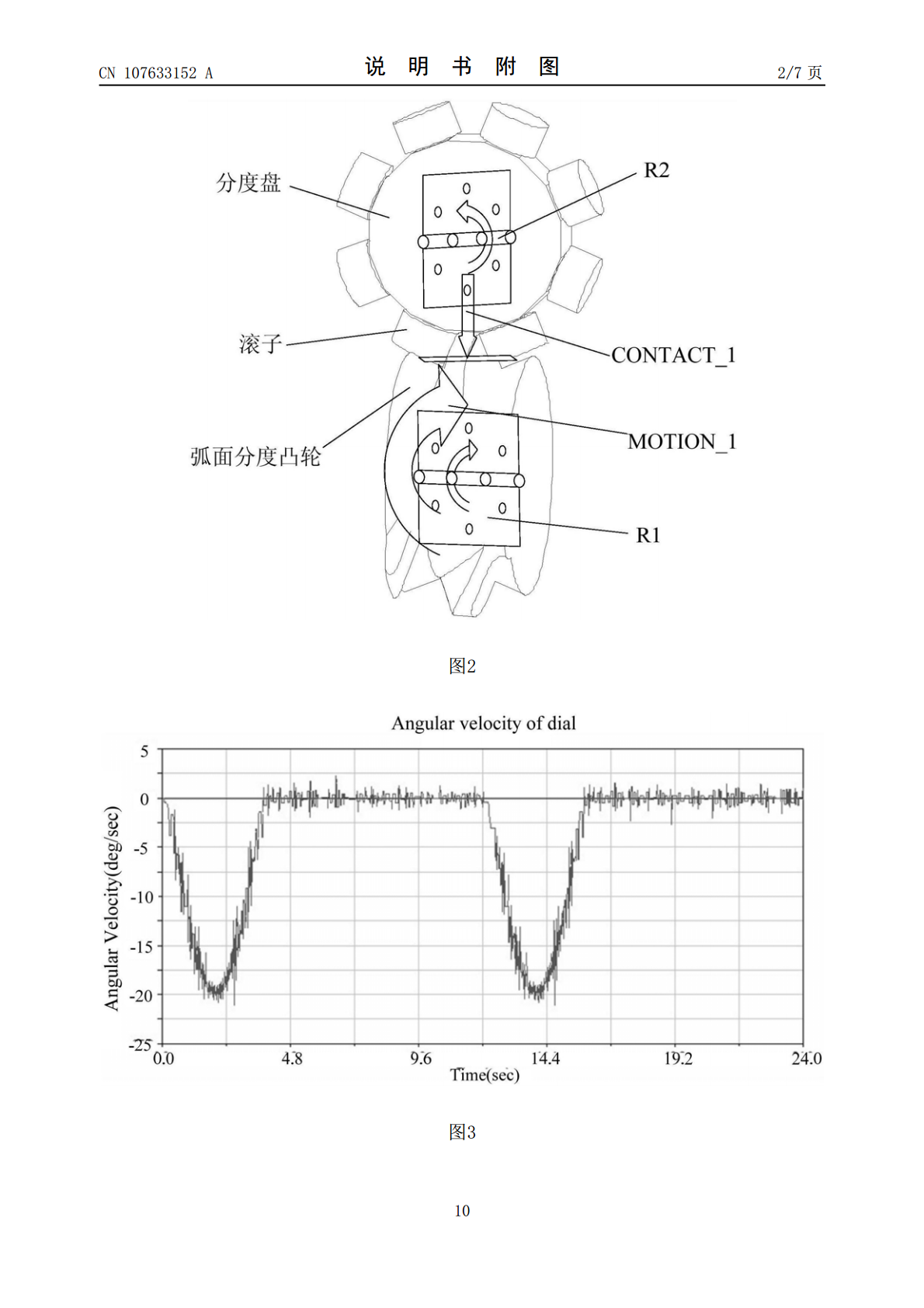
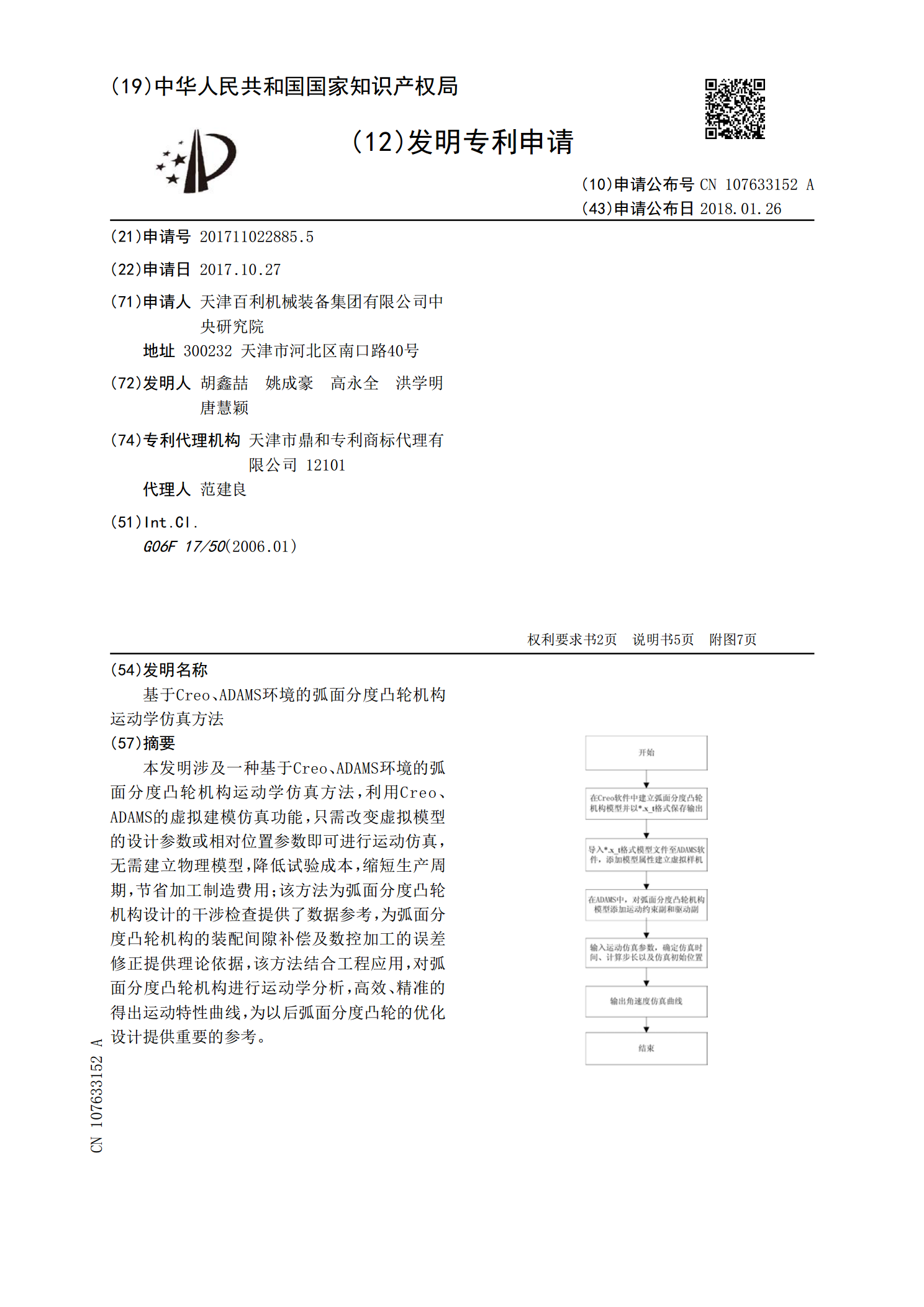
本发明涉及一种基于Creo、ADAMS环境的弧面分度凸轮机构运动学仿真方法,利用Creo、ADAMS的虚拟建模仿真功能,只需改变虚拟模型的设计参数或相对位置参数即可进行运动仿真,无需建立物理模型,降低试验成本,缩短生产周期,节省加工制造费用;该方法为弧面分度凸轮机构设计的干涉检查提供了数据参考,为弧面分度凸轮机构的装配间隙补偿及数控加工的误差修正提供理论依据,该方法结合工程应用,对弧面分度凸轮机构进行运动学分析,高效、精准的得出运动特性曲线,为以后弧面分度凸轮的优化设计提供重要的参考。

基于ADAMS的弧面分度凸轮机构的动力学仿真.docx
基于ADAMS的弧面分度凸轮机构的动力学仿真一、引言凸轮机构是一种远古而广泛应用的机构,是机械传动系统中的核心部件之一。在现代工业中,凸轮机构的应用范围越来越广,涵盖了飞机、汽车、发电机等各个领域。而ARMS软件是一种非常常用的用于机械系统动力学仿真的工具,尤其擅长于分析和优化非线性和多体动力学模型。因此,本文将基于ADAMS软件,对一种基于凸轮机构的弧面分度机构进行动力学仿真分析。二、凸轮机构基本原理凸轮机构主要由凸轮、摇杆和摆线轮三部分构成。机构通过凸轮的输出运动,使摇杆和摆线轮产生相应的运动,从而实
一种基于Creo的弧面分度凸轮建模方法.pdf
本发明涉及一种基于Creo的弧面分度凸轮建模方法,建模包括如下步骤:建立弧面分度机构的动坐标系和静坐标系;根据间歇运动规律及弧面分度凸轮和分度盘的啮合原理建立啮合点的RPY变换矩阵;建立并求解矩阵变换方程,得出啮合点在定坐标系中的笛卡尔坐标值;根据所求取的啮合点的空间坐标值,在Creo软件中编制弧面分度凸轮建模程序,绘制啮合曲线;将曲线分别拟合,修正填充凸轮实体,得到弧面分度凸轮三维模型。本发明所提供的技术方案借助Creo软件强大的CAD曲面建模功能,提供了精确建立弧面分度凸轮模型的方法,此种方法可以大幅

基于ADAMS的连续分度弧面凸轮机构虚拟样机建模与分析.docx
基于ADAMS的连续分度弧面凸轮机构虚拟样机建模与分析摘要:本文利用ADAMS软件建立了一台连续分度弧面凸轮机构的虚拟样机,对该机构进行了运动学和动力学仿真分析,验证了机构的稳定性和可靠性。通过仿真数据结果,对机构设计进行了优化,使得该机构能够在实际生产中得到更好的应用。本文对工程师们研究此类机构提供了参考。关键词:ADAMS软件,连续分度弧面凸轮机构,动力学仿真,优化设计引言:连续分度弧面凸轮机构是一种常用的动力传动机构,广泛应用于各种重载机械和高速精密机械领域。但如何设计一台具有较高稳定性和可靠性的连

可输出多种分度数的弧面分度凸轮机构的设计与仿真.docx
可输出多种分度数的弧面分度凸轮机构的设计与仿真一、引言随着机械制造技术的不断发展,越来越多的机械设备需要控制旋转或者摆动的运动方式,而在机械运动过程中,凸轮机构作为一种常用的减速机构广泛应用于各行各业。目前,各种各样的凸轮机构成为了工程师设计时的常用减速机构之一,特别是在自动化设备和制造生产系统中,凸轮机构的应用越来越广泛。本文将介绍一种新型的设计思路,即采用多种分度数的弧面分度凸轮机构,这种机构的设计与仿真尤为重要。简单来说,这种机构分成了两部分,即轮与凸轮,并通过一个相对运动的过程实现旋转或者摆动。在