
自动对焦_.pptx

骑着****猪猪

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动对焦_.pptx
会计学在相机中,对焦和曝光是确定最终图像质量的量个重要参数。自动对焦和自动曝光是相机软件组成的两个关键技术。决定最终照片质量的三个参数:(1)、白平衡把各种不同光源色温下的被摄景物的颜色,拍摄还原成标准色温下的颜色。调整白平衡,是保证准确还原被摄物的真实颜色的需要。(2)、对焦对焦的目的是使被摄景物在感光芯片平面上结成清晰的影像,保证所摄画面上主体影像的清晰(3)、曝光在拍摄过程中使相机中的感光芯片得到合适的曝光相机所采用的对焦方式可分为三类:1、手动对焦2、自动对焦3、免对焦手动对焦是用手转动镜头上的对
自动对焦方法.pdf
本发明提供一种自动对焦方法,包括:以镜头可调节的焦距区间作为搜索范围,逐次依据预定比例由两端向内缩减搜索范围;其中,每次缩减搜索范围时,对图像结果评估最好的目标点所在区间进行保留;当搜索范围达到预设范围时,获取依据预定比例由两端向内缩减确定两个目标点的图像评估结果和搜索范围两个边界点的图像评估结果;当两个目标点的图像评估结果和其中一个边界点的图像评估结果符合二次插值的起始条件时,采用两个目标点和符合条件的边界点进行二次插值,直至确定对焦位置。本发明提供的自动对焦方法,能够在初始时以较大的步进快速缩小搜索范
自动对焦装置.pdf
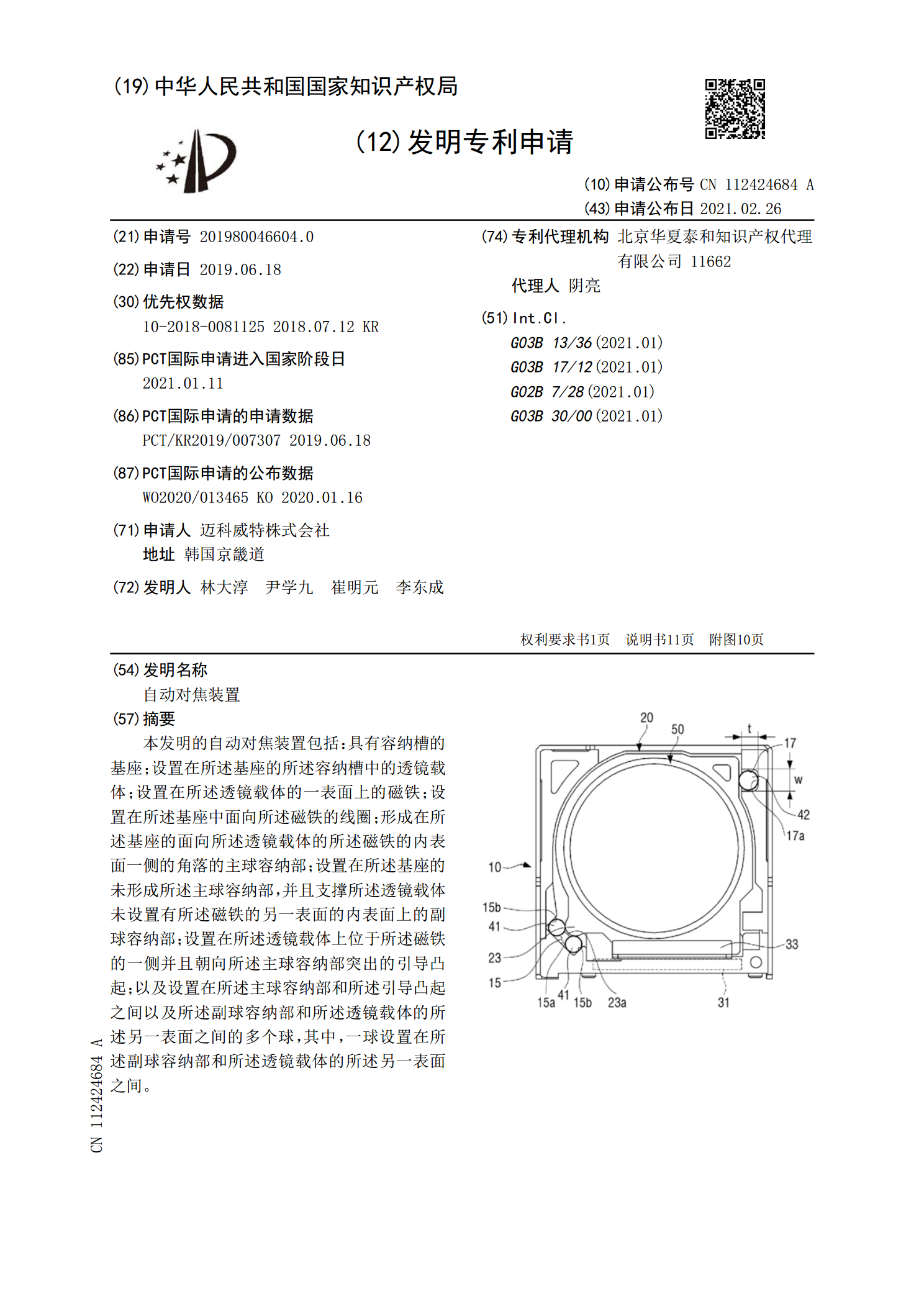
本发明的自动对焦装置包括:具有容纳槽的基座;设置在所述基座的所述容纳槽中的透镜载体;设置在所述透镜载体的一表面上的磁铁;设置在所述基座中面向所述磁铁的线圈;形成在所述基座的面向所述透镜载体的所述磁铁的内表面一侧的角落的主球容纳部;设置在所述基座的未形成所述主球容纳部,并且支撑所述透镜载体未设置有所述磁铁的另一表面的内表面上的副球容纳部;设置在所述透镜载体上位于所述磁铁的一侧并且朝向所述主球容纳部突出的引导凸起;以及设置在所述主球容纳部和所述引导凸起之间以及所述副球容纳部和所述透镜载体的所述另一表面之间的多

什么是自动对焦.docx
什么是自动对焦什么是自动对焦导语:所谓对焦,是指调较相机镜头,使被拍物成像清晰的过程。从前人们要拍照只能进行手动对焦,慢慢调较镜头令影像清晰,但现在的相机都有自动对焦(AF,AutoFocus)功能,轻轻一按快门,映象就会自动变得清晰。什么是自动对焦镜头上选择自动对焦的按钮使用手动对焦时,需要转动对焦环来找清晰的对焦点对比检测对焦VS相位检测对焦现时主流的自动对焦模式,都是对比检测(contrastdetection)或相位检测测(phasedetection),前者主要用于小DC或无反相机上,后者则主要

反差式自动对焦与相位检测对焦原理.docx
详细讲解(反差式自动对焦与相位检测对焦)原理近日富士推出一款F305EXR采用了独特的相位检测自动对焦系统。与单反相机不同,该机将CCD中内置相位侦测像素。这种传感器上的成对相位检测传感器的工作方式与DSLR的传感器相似。富士对焦专用像素对比检测自动对焦在检测到最大对比度之前不断调整,因而速度较慢,相位检测自动对焦与其不同,它将入射光线分成成对的图像,执行一次相位差计算以确定对焦调整的精确方向和调整量,富士测试自动对焦检测速度最高达约0.158秒。从富士的介绍上我们对两种自动对焦的特点有了初步了解,那么我