
一种基于卷积神经网络的水平集目标追踪方法.pdf

书生****文章

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于卷积神经网络的水平集目标追踪方法.pdf
本发明涉及一种基于卷积神经网络的水平集目标追踪方法,属于目标追踪和视频处理技术领域。本该方法包括以下步骤:一、利用视频输入的第一帧和第一帧标准目标轮廓初始化Adaboost检测模块;二、调用检测模块获取物体在后续视频帧中的初步位置和形状;三、在上一步基础上运行水平集法追踪模块,精确分割物体轮廓;四、使用步骤三的结果区分前景/背景,更新检测模块的弱分类器。本发明所提出的卷积神经网络特征利用方式,能够对前景/背景做出更好的区分,从而提高检测准确性,提高了整体的目标追踪效果;能够平衡性能和效率,在相同的运行速度
基于全卷积神经网络的即时目标追踪检测方法及系统.pdf
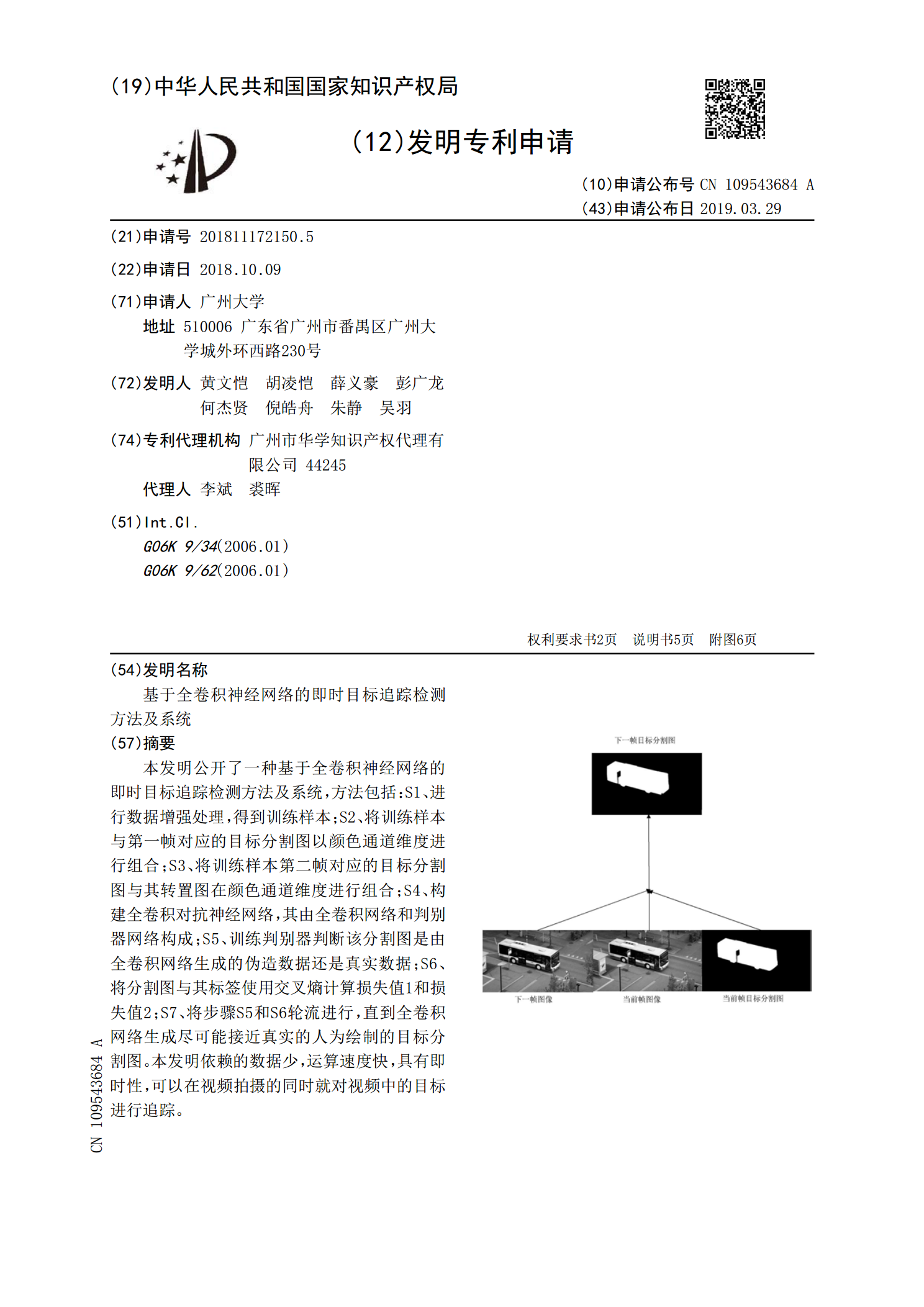
本发明公开了一种基于全卷积神经网络的即时目标追踪检测方法及系统,方法包括:S1、进行数据增强处理,得到训练样本;S2、将训练样本与第一帧对应的目标分割图以颜色通道维度进行组合;S3、将训练样本第二帧对应的目标分割图与其转置图在颜色通道维度进行组合;S4、构建全卷积对抗神经网络,其由全卷积网络和判别器网络构成;S5、训练判别器判断该分割图是由全卷积网络生成的伪造数据还是真实数据;S6、将分割图与其标签使用交叉熵计算损失值1和损失值2;S7、将步骤S5和S6轮流进行,直到全卷积网络生成尽可能接近真实的人为绘制

基于卷积神经网络的单目标视觉追踪算法研究.docx
基于卷积神经网络的单目标视觉追踪算法研究基于卷积神经网络的单目标视觉追踪算法研究摘要:随着计算机视觉的发展和应用领域的拓宽,目标追踪成为了一个重要的研究方向。单目标视觉追踪算法是目标追踪研究的一个核心问题。本论文主要研究基于卷积神经网络(CNN)的单目标视觉追踪算法。首先介绍了目标追踪的基本概念和研究现状,然后引入卷积神经网络的基本原理和发展历程。接着分析了一些典型的基于CNN的目标追踪算法,并对它们进行了比较。最后展望了基于CNN的单目标视觉追踪算法的未来发展方向。关键词:目标追踪、卷积神经网络、单目标
基于卷积神经网络的目标检测方法.pdf
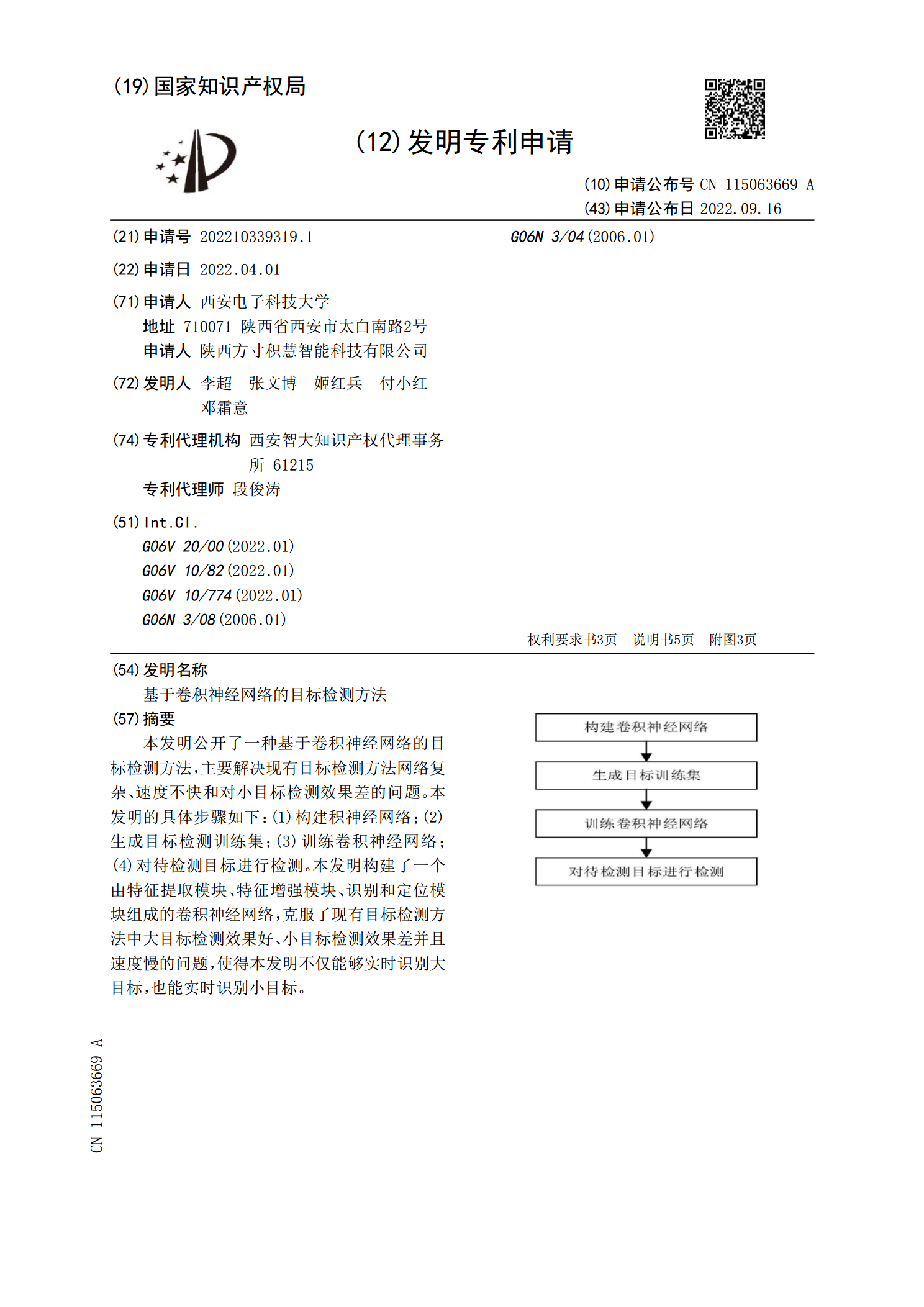
本发明公开了一种基于卷积神经网络的目标检测方法,主要解决现有目标检测方法网络复杂、速度不快和对小目标检测效果差的问题。本发明的具体步骤如下:(1)构建积神经网络;(2)生成目标检测训练集;(3)训练卷积神经网络;(4)对待检测目标进行检测。本发明构建了一个由特征提取模块、特征增强模块、识别和定位模块组成的卷积神经网络,克服了现有目标检测方法中大目标检测效果好、小目标检测效果差并且速度慢的问题,使得本发明不仅能够实时识别大目标,也能实时识别小目标。
基于深度卷积神经网络和随机森林的地震层位追踪方法.pdf
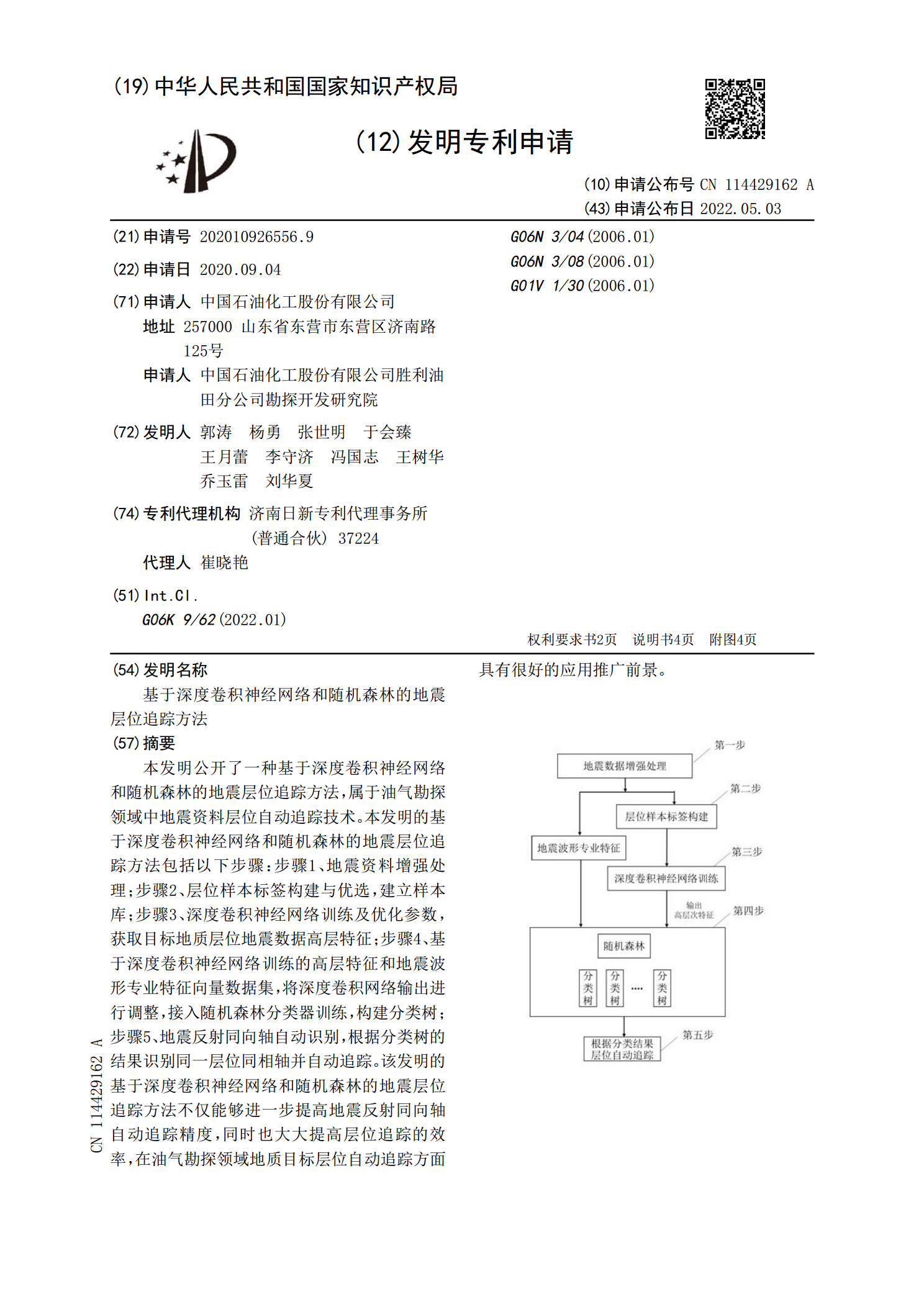
本发明公开了一种基于深度卷积神经网络和随机森林的地震层位追踪方法,属于油气勘探领域中地震资料层位自动追踪技术。本发明的基于深度卷积神经网络和随机森林的地震层位追踪方法包括以下步骤:步骤1、地震资料增强处理;步骤2、层位样本标签构建与优选,建立样本库;步骤3、深度卷积神经网络训练及优化参数,获取目标地质层位地震数据高层特征;步骤4、基于深度卷积神经网络训练的高层特征和地震波形专业特征向量数据集,将深度卷积网络输出进行调整,接入随机森林分类器训练,构建分类树;步骤5、地震反射同向轴自动识别,根据分类树的结果识