
一种新型并联机器人位姿的视觉检测系统的研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型并联机器人位姿的视觉检测系统的研究的中期报告.docx
一种新型并联机器人位姿的视觉检测系统的研究的中期报告一、研究背景和目的随着机器人技术的日益成熟和普及,机器人在生产制造、医疗、物流等领域的应用越发广泛。在机器人的控制中,位姿是非常重要的参数,能够影响机器人的操作效率和准确度。同时,在机器人运动中,位姿会发生变化,需要对其进行实时、准确的检测和调整。而目前,机器人位姿的检测主要依靠传感器,例如激光雷达、相机等。但传统的单一传感器在实际使用中存在着许多不足,例如传感器的信息不全、噪声干扰等。针对这一问题,本研究提出了一种新型的机器人位姿的视觉检测系统,旨在提

一种新型并联机器人位姿的视觉检测系统的研究的综述报告.docx
一种新型并联机器人位姿的视觉检测系统的研究的综述报告随着机器人技术的不断发展,机器人系统在制造业、航空航天等领域扮演着越来越重要的角色。位姿控制是机器人精度控制和路径规划的重要环节之一。而视觉检测系统在机器人位姿控制中起着至关重要的作用。本文将概括介绍一种新型并联机器人位姿的视觉检测系统。一、并联机器人概述并联机器人是由多个连杆和关节组成的机械臂,相比于串联机器人,其具有更高的精度、刚度和负载能力。并联机器人普遍应用于工业领域,尤其是在自动化加工中。二、并联机器人位姿控制位姿控制是并联机器人性能控制的重要

基于视觉的并联机器人位姿检测方法研究的开题报告.docx
基于视觉的并联机器人位姿检测方法研究的开题报告1.研究背景和意义随着机器人技术的不断发展,尤其是视觉技术的广泛应用,机器人在各种场合中的应用越来越广泛。并联机器人作为机器人技术的重要分支,已经在工业生产和科学研究中广泛应用,并取得了许多令人瞩目的成果。其中,位置和姿态控制是并联机器人应用中最基础的问题之一。目前的技术水平很难在高精度的位置和姿态控制方面得到解决,尤其是对于复杂的结构和变形的系统,如何准确地测量其位置和姿态仍然是一个重要的研究方向。视觉技术作为一种越来越普及和成熟的技术,能够在很大程度上解决

基于优化RBF神经网络的并联机器人位姿检测的综述报告.docx
基于优化RBF神经网络的并联机器人位姿检测的综述报告随着机器人技术在工业生产、医疗和日常生活中的广泛应用,机器人位姿检测成为了一个十分重要的问题。机器人位姿检测指的是确定机器人在三维空间中的位置和姿势,也就是确定机器人在空间中的位置、角度和方向的过程。因为这个过程关系到机器人之后的动作和决策,所以在机器人技术中具有重要的意义。在机器人位姿检测中,目前最常用的方法是将机器人与辅助设备相结合,如激光摄像头和传感器等,以获得更精确的位置信息。但是,这些设备的成本昂贵,工作复杂,安装和导航麻烦,因此寻找一种简单的
一种空间圆弧位姿的视觉检测方法.pdf
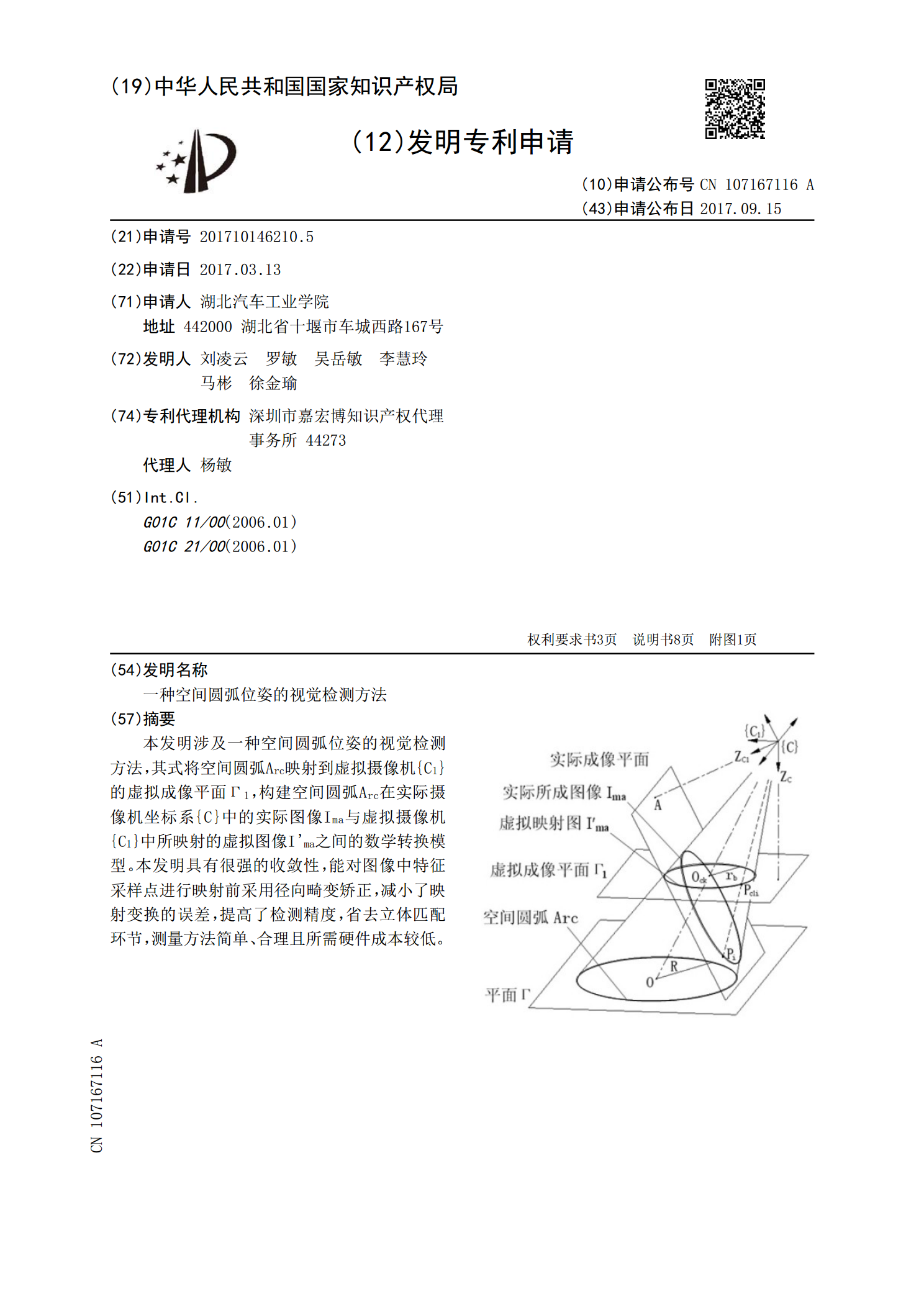
本发明涉及一种空间圆弧位姿的视觉检测方法,其式将空间圆弧A<base:Sub>rc</base:Sub>映射到虚拟摄像机{C<base:Sub>1</base:Sub>}的虚拟成像平面Γ<base:Sub>1</base:Sub>,构建空间圆弧A<base:Sub>rc</base:Sub>在实际摄像机坐标系{C}中的实际图像I<base:Sub>ma</base:Sub>与虚拟摄像机{C<base:Sub>1</base:Sub>}中所映射的虚拟图像I<base:Sub>ma</base:Sub>之间的