
基于工业机器人的非球面工件打磨技术研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于工业机器人的非球面工件打磨技术研究的开题报告.docx
基于工业机器人的非球面工件打磨技术研究的开题报告一、选题背景和意义:工业机器人在制造业中具有重要作用,它们能够自动化完成重复性高、工作强度大、技术难度高的操作,提高了生产效率和品质。其中,非球面工件的打磨是一项难度较大的工作,同时也是制造过程中必不可少的环节。然而,传统的非球面工件打磨技术大多需要人工干预,效率不高且精度难以保证。因此,基于工业机器人的非球面工件打磨技术研究具有重要的理论和应用价值。二、研究内容该研究的主要内容为:基于工业机器人的非球面工件打磨技术。在此基础上,探究如何通过数学模型建立非球
一种基于工业机器人的工件集成打磨系统.pdf
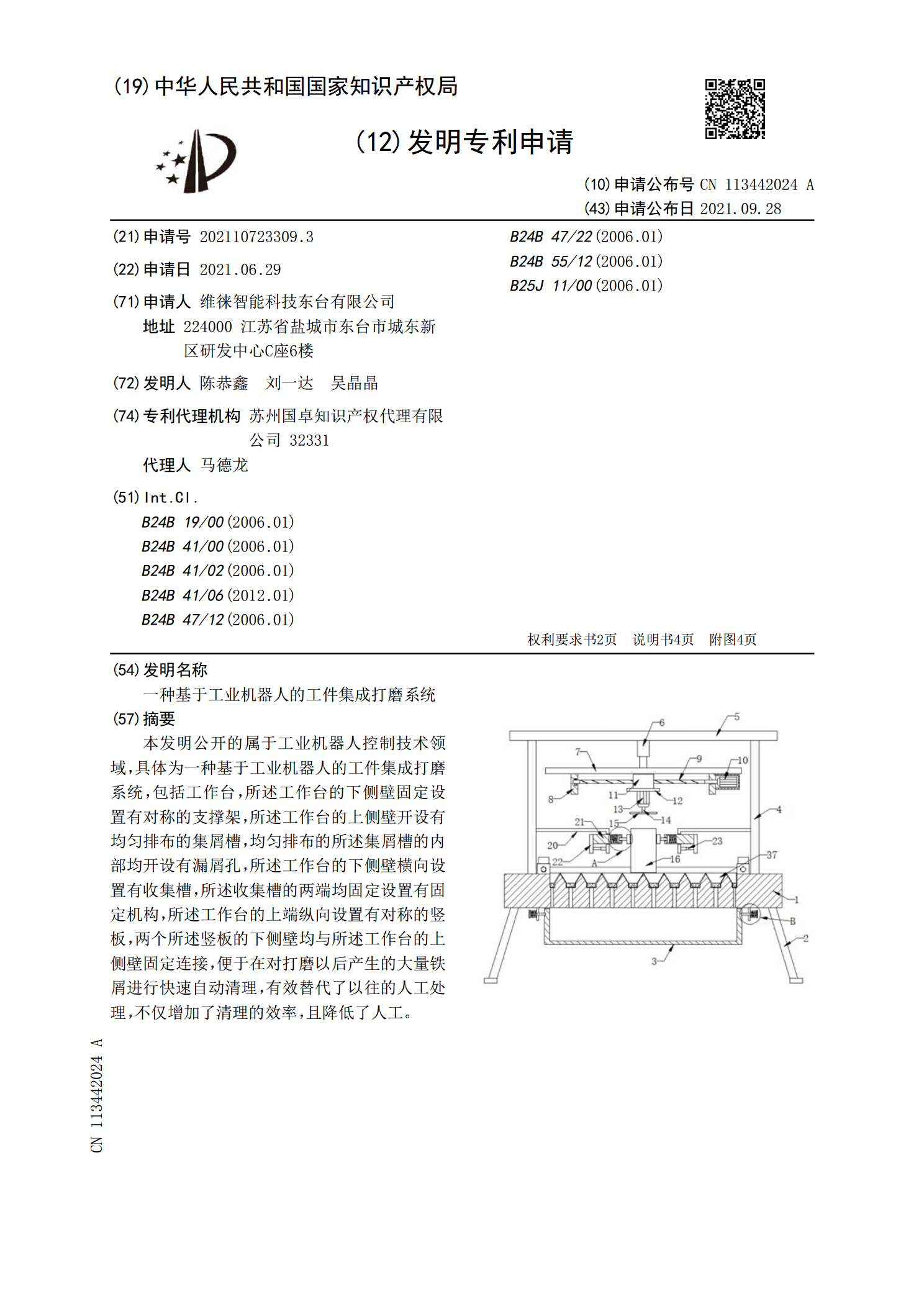
本发明公开的属于工业机器人控制技术领域,具体为一种基于工业机器人的工件集成打磨系统,包括工作台,所述工作台的下侧壁固定设置有对称的支撑架,所述工作台的上侧壁开设有均匀排布的集屑槽,均匀排布的所述集屑槽的内部均开设有漏屑孔,所述工作台的下侧壁横向设置有收集槽,所述收集槽的两端均固定设置有固定机构,所述工作台的上端纵向设置有对称的竖板,两个所述竖板的下侧壁均与所述工作台的上侧壁固定连接,便于在对打磨以后产生的大量铁屑进行快速自动清理,有效替代了以往的人工处理,不仅增加了清理的效率,且降低了人工。

基于工业机器人的离轴非球面轮式抛光技术研究.docx
基于工业机器人的离轴非球面轮式抛光技术研究基于工业机器人的离轴非球面轮式抛光技术研究摘要:离轴非球面轮式抛光技术是一种有效改善工件表面粗糙度的方法,该技术在光学、汽车和航空等领域有着广泛的应用。本文研究基于工业机器人的离轴非球面轮式抛光技术,通过系统地分析和探讨,提出了一种基于工业机器人的离轴非球面轮式抛光工艺流程,并进行了仿真和实验验证,结果表明该技术对于提高工件表面精度具有显著的效果。关键词:离轴非球面轮式抛光;工业机器人;抛光工艺流程;精度1.引言离轴非球面轮式抛光技术是一种通过离轴旋转的方式对工件

基于数字莫尔条纹的非球面检测技术研究的开题报告.docx
基于数字莫尔条纹的非球面检测技术研究的开题报告开题报告一、选题背景在工业制造和科学研究等领域,对于物体的形状和表面质量的检测非常重要。目前,许多传统的表面检测方法只适用于球面物体,而对于非球面物体的检测则存在很大的困难。为了解决这一问题,数字莫尔条纹技术成为了一种非常有前景的非球面表面检测方法。数字莫尔条纹技术是一种利用莫尔条纹进行形状和表面质量检测的技术。通过对物体表面的光学反射进行分析,可以得到物体表面的高度变化信息。然后利用数字处理技术对莫尔条纹进行处理,从而得到物体表面的形状和表面质量等信息。目前

工业机器人视觉定位与工件装配研究的开题报告.docx
工业机器人视觉定位与工件装配研究的开题报告开题报告题目:工业机器人视觉定位与工件装配研究1.研究背景随着智能制造的迅速发展,工业机器人在生产制造领域的应用越来越广泛。其中,工件装配是工业机器人常见的应用之一,其准确性和效率对生产制造的质量和效益有着重要的影响。而工业机器人视觉定位的应用可以大大提高工件装配的准确性和效率,因此,研究工业机器人视觉定位与工件装配是当前工业机器人领域的热点和难点问题之一。2.研究目的本研究旨在探究工业机器人视觉定位与工件装配的相关技术及其应用。具体包括以下几个方面:(1)研究工