
纵环缝机器人自动化焊接工装.pdf

一条****发啊

1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
纵环缝机器人自动化焊接工装.pdf
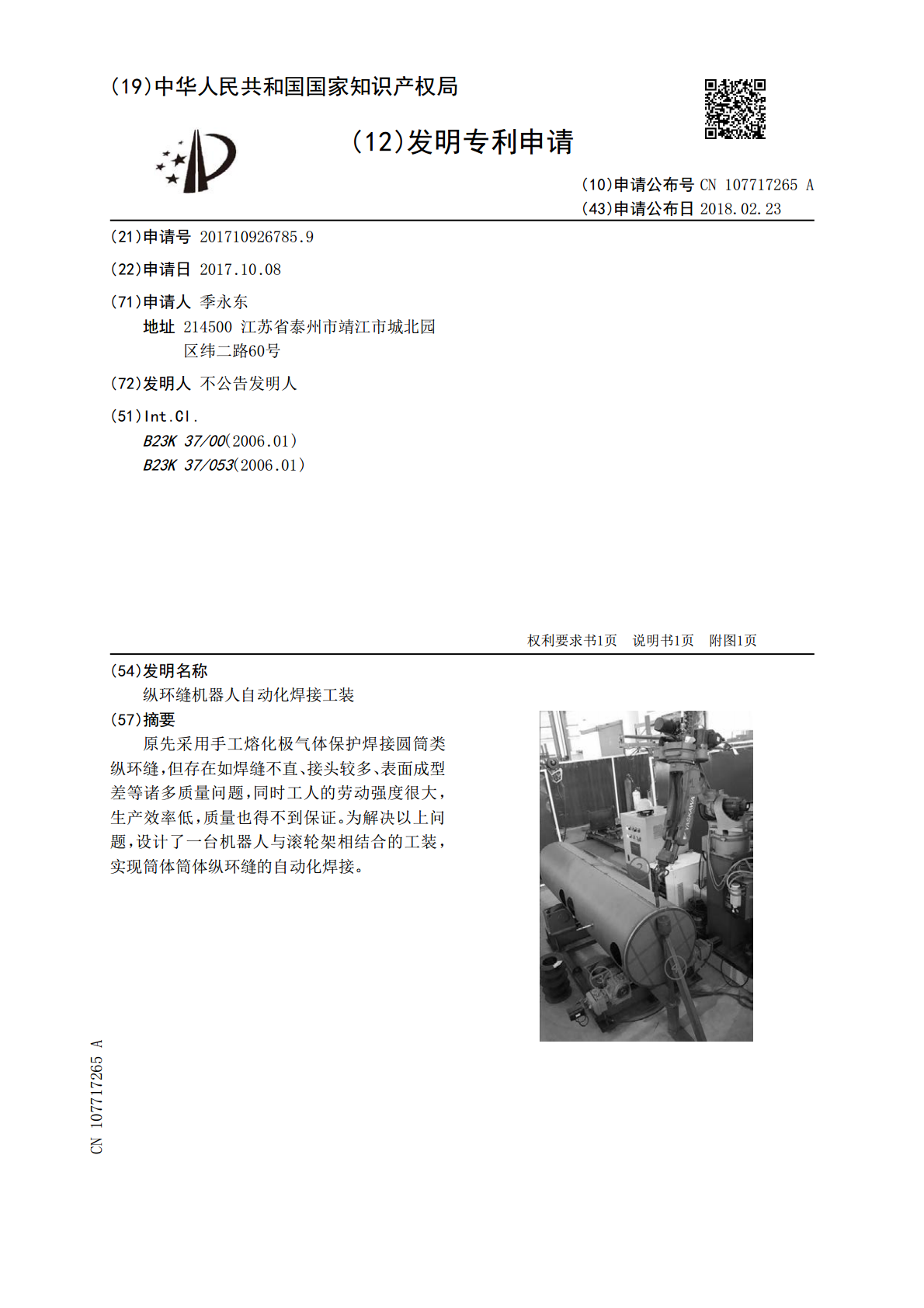
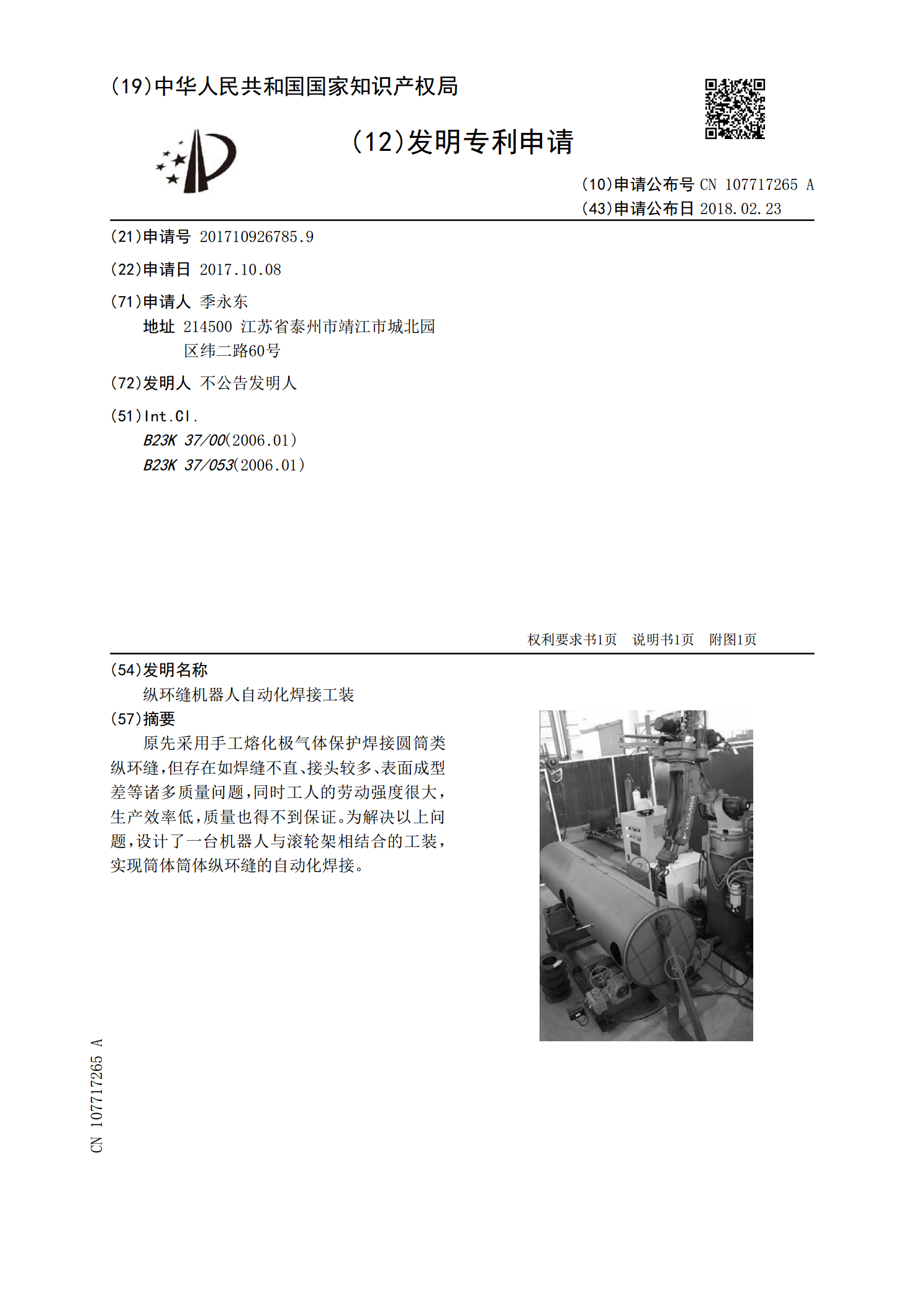
原先采用手工熔化极气体保护焊接圆筒类纵环缝,但存在如焊缝不直、接头较多、表面成型差等诸多质量问题,同时工人的劳动强度很大,生产效率低,质量也得不到保证。为解决以上问题,设计了一台机器人与滚轮架相结合的工装,实现筒体筒体纵环缝的自动化焊接。
窄筒体纵缝焊接工装.pdf
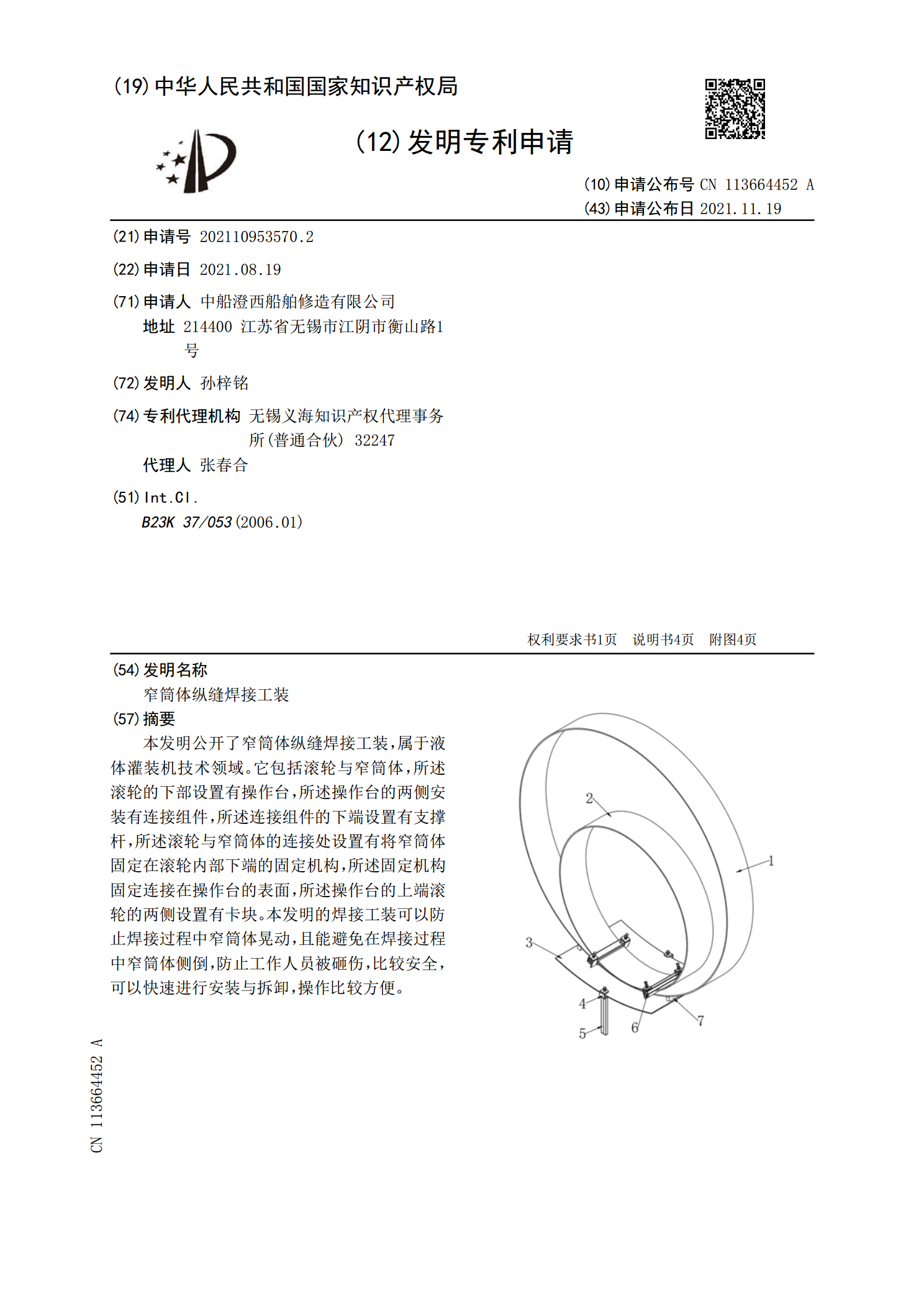
本发明公开了窄筒体纵缝焊接工装,属于液体灌装机技术领域。它包括滚轮与窄筒体,所述滚轮的下部设置有操作台,所述操作台的两侧安装有连接组件,所述连接组件的下端设置有支撑杆,所述滚轮与窄筒体的连接处设置有将窄筒体固定在滚轮内部下端的固定机构,所述固定机构固定连接在操作台的表面,所述操作台的上端滚轮的两侧设置有卡块。本发明的焊接工装可以防止焊接过程中窄筒体晃动,且能避免在焊接过程中窄筒体侧倒,防止工作人员被砸伤,比较安全,可以快速进行安装与拆卸,操作比较方便。

屏蔽厂房SC结构纵缝焊接辅助工装.pdf
本发明属于核电施工辅助设备技术领域。为了实现对屏蔽厂房SC结构纵缝的焊接,保证焊缝质量以及焊后模块的尺寸要求,本发明公开了一种屏蔽厂房SC结构纵缝焊接辅助工装。该辅助工装,包括支撑架、两个固定架和压紧装置;其中,所述支撑架沿水平方向横跨在内墙板和外墙板之间;两个固定架与所述支撑架滑动连接,并且均位于内墙板和外墙板之间;所述固定架的一端悬挂在所述支撑架上,另一端沿平行于纵缝的方向向下延伸;所述压紧装置沿水平方向固定在两个所述固定架之间,并且可以沿水平方向进行伸缩运动。采用本发明的辅助工装对屏蔽厂房SC结构纵

输变电钢管杆横担纵缝焊接变位工装.pdf
本发明提供一种输变电钢管杆横担纵缝焊接变位工装,包括:固定机构,固定机构包括活动支座、以及固定支座。固定支座包括安装座、以及翻转夹具,翻转夹具安装于安装座的顶部,翻转夹具包括转轴、以及横导杆,横导杆上滑动安装有两个夹钳,横导杆上设有滑槽,滑槽内安装有滑轮,滑轮上连接有钢丝绳,钢丝绳连接两个夹钳。活动支座包括底座,以及升举机构,升举机构包括升举丝杆、以及支撑板;底座内设有蜗轮、蜗杆,升举丝杆伸入底座内的一端与蜗轮啮合,支撑板亦安装有翻转夹具。其中一个翻转夹具的转轴的另一端安装有翻转手柄和定位销;固定支座或支
一种应用于筒体纵环缝组对焊接工作站的焊接工装.pdf
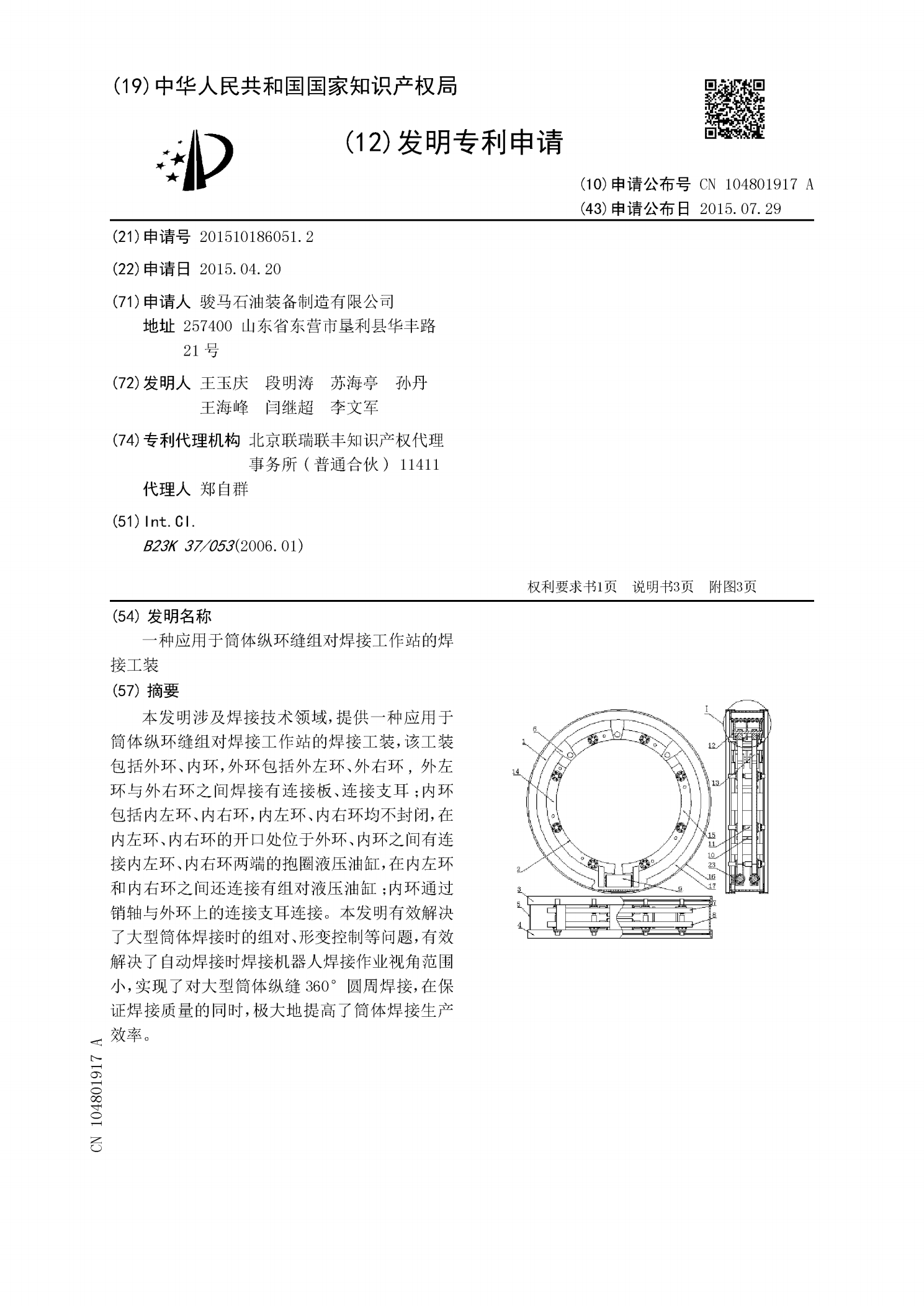
本发明涉及焊接技术领域,提供一种应用于筒体纵环缝组对焊接工作站的焊接工装,该工装包括外环、内环,外环包括外左环、外右环,外左环与外右环之间焊接有连接板、连接支耳;内环包括内左环、内右环,内左环、内右环均不封闭,在内左环、内右环的开口处位于外环、内环之间有连接内左环、内右环两端的抱圈液压油缸,在内左环和内右环之间还连接有组对液压油缸;内环通过销轴与外环上的连接支耳连接。本发明有效解决了大型筒体焊接时的组对、形变控制等问题,有效解决了自动焊接时焊接机器人焊接作业视角范围小,实现了对大型筒体纵缝360°圆周焊接