
一种微晶玻璃的自动磨边机.pdf

努力****晓骞

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种微晶玻璃的自动磨边机.pdf
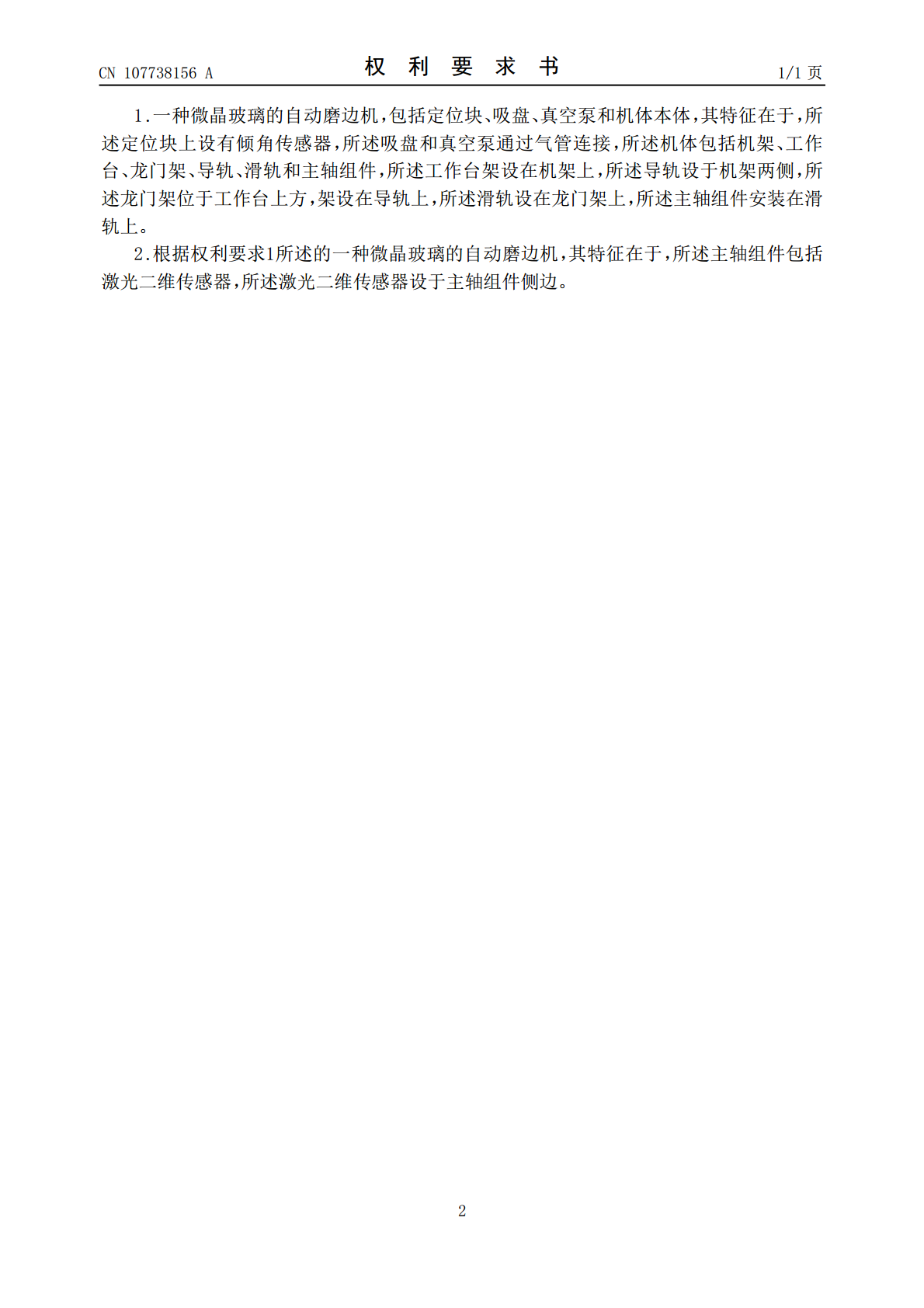
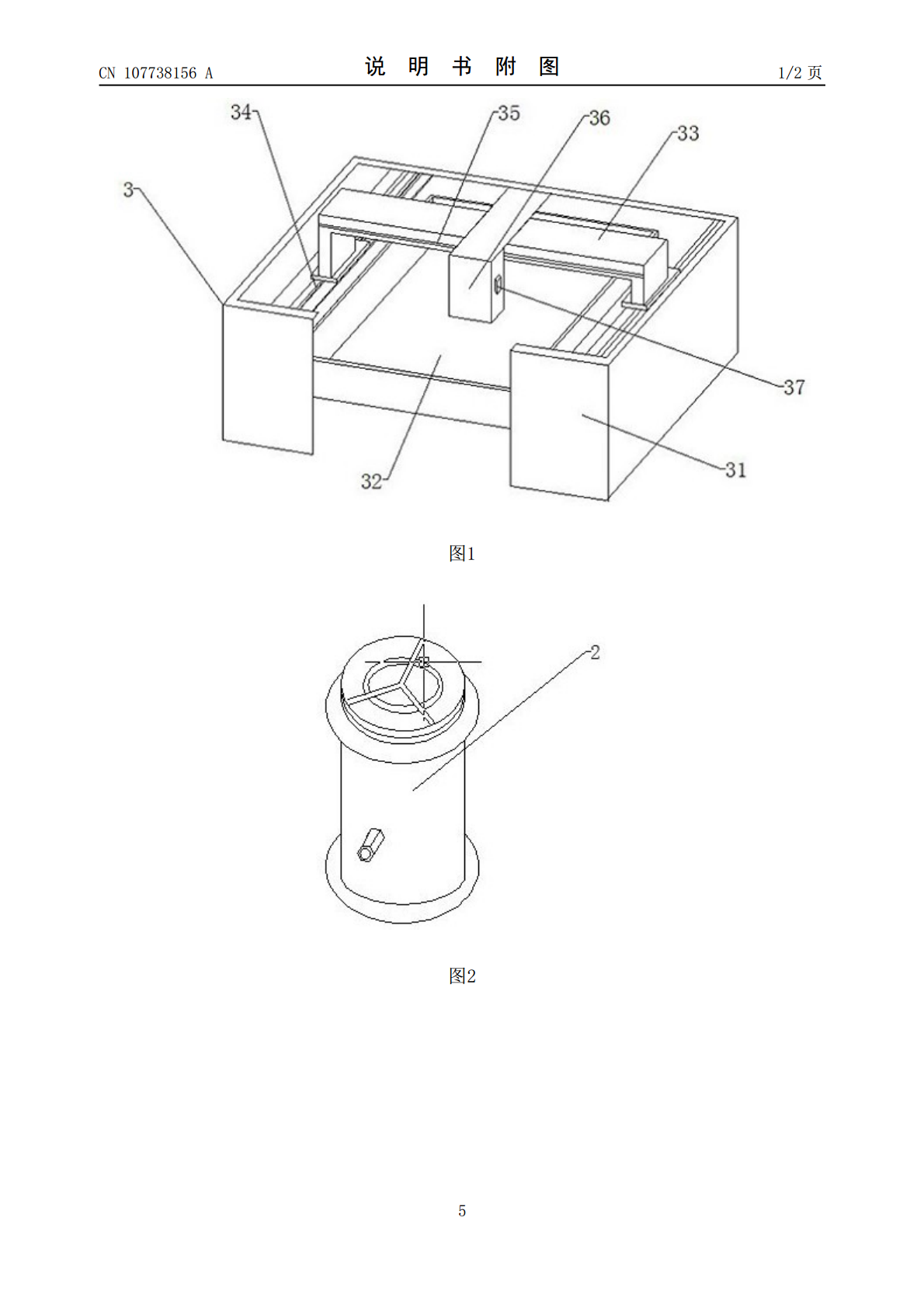
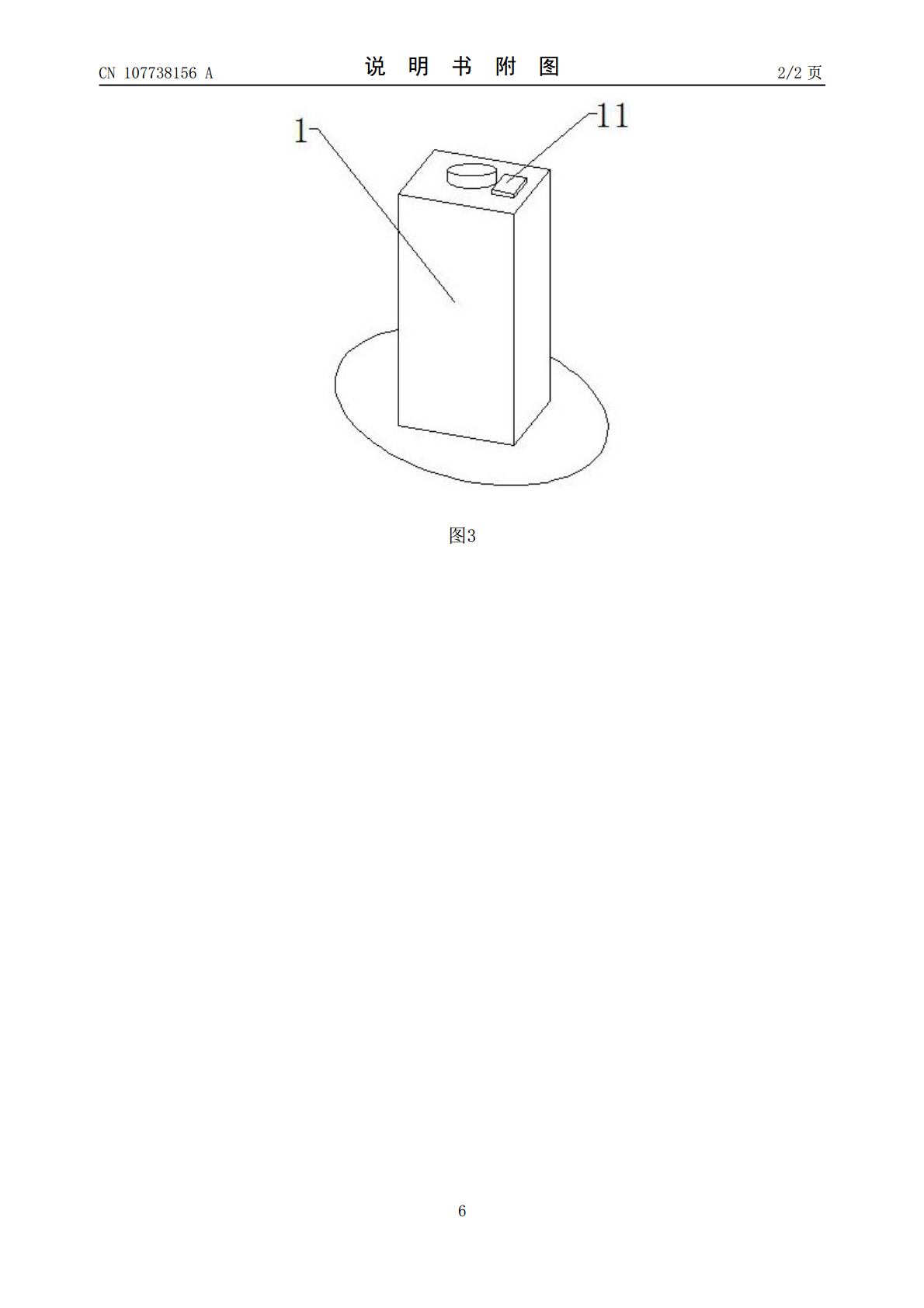
本发明公开了一种微晶玻璃的自动磨边机,包括定位块、吸盘、真空泵和机体,所述定位块上设有倾角传感器,所述吸盘与真空泵通过气管连接,所述机体包括机架、工作台、龙门架、导轨、滑轨和主轴组件,所述工作台架设在机架上,所述导轨设于机架两侧,所述龙门架位于工作台上方,架设在导轨上,所述滑轨设在龙门架上,所述主轴组件安装在滑轨上,包括有激光二维传感器。本发明能够准确定位工件初始水平位,快速扫描玻璃工件初始和加工过程中的三维轮廓,同时通过真空泵增强吸盘的吸力和稳定性,提高工件的加工精度和效果。

一种玻璃半自动磨边机.pdf
本发明提供公开一种玻璃半自动磨边机,包括工作台和同步电机,所述工作台上设有安装板,所述同步电机设置于安装板的一侧,其特征在于,所述安装板的两端设有支撑座,所述支撑座上设有轴承,所述轴承上设有转动轴,所述转动轴上设有同步传动轮,所述同步传动轮上设有同步传动带,所述转动轴与同步电机的输出端连接,所述同步传动带的两侧设有线性导轨,所述线性导轨上设有滑块,所述滑块上设有固定板,所述同步传动带与固定板底部固定连接,所述固定板上设有升降台,所述升降台上设有夹持换向单元。本发明所述玻璃半自动磨边机工作效率高,减小了工人

一种半自动高效玻璃磨边机.pdf
本发明公开了一种半自动高效玻璃磨边机,U型架通过导轮与导轨滑动连接,U型架水平部左右两侧分别滑动连接一个左滑块与一个右滑块,电机为两个分别安装在左滑块与右滑块外端面处,且电机输出轴向下延伸后末端固接一个磨边轮,固定块通过轴承转动安装一根双向丝杆,且双向丝杆左右两端分别穿过左右两侧的左滑块与右滑块,左滑块、右滑块分别与双向丝杆螺纹连接,双向丝杆右端固接一根连接杆,连接杆另一端固接一个手柄,工作台上端面均匀安装有固定吸盘,电动伸缩杆竖直安装在U型架水平部下端面处,电动伸缩杆的下端与安装板上端面中部固接,安装板

一种全自动玻璃异形磨边机.pdf
本发明公开了一种全自动玻璃异形磨边机,包括固定座,所述固定座顶部外壁的一侧固定连接有连接座,且连接座的一侧外壁开设有滑槽,所述滑槽的内壁滑动连接有滑块,且滑块的一侧外壁开设有螺纹孔,所述螺纹孔的内壁螺纹连接有第二螺纹杆,且第二螺纹杆的两端与滑槽之间通过轴承形成滑动连接,所述连接座的顶部外壁固定连接有第二电机,且第二电机与第二螺纹杆之间通过螺栓连接,所述滑块的一侧外壁固定连接有支撑架。本发明能够防止由于磨边时对玻璃造成损坏,能够对玻璃的上下边角进行打磨处理,防止玻璃碎屑发生飞溅对周边的人员造成误伤,能够便于

微晶玻璃《微晶玻璃》阅读及答案.docx
微晶玻璃《微晶玻璃》阅读及答案微晶玻璃《微晶玻璃》阅读及答案阅读下面说明文,完成12~14题。(10分)①微晶玻璃是我国刚刚开发的一种新型的建筑材料,它的学名叫做玻璃陶瓷。微晶玻璃和我们常见的玻璃看起来大不相同。它具有玻璃和陶瓷的双重特性,普通玻璃内部的原子排列是没有规律的,这也是玻璃易碎的原因之一。而微晶玻璃象陶瓷一样,由晶体组成,也就是说,它的原子排列是有规律的。所以,微晶玻璃比陶瓷的亮度高,比玻璃韧性强。②现在,我们做一个微晶玻璃与天然石材的对比实验。我们把墨水分别倒在大理石和微晶玻璃上,稍等片刻,