
一种基于颈部肌音信号处理的轮椅控制方法及控制系统.pdf

大渊****公主


1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于颈部肌音信号处理的轮椅控制方法及控制系统.pdf
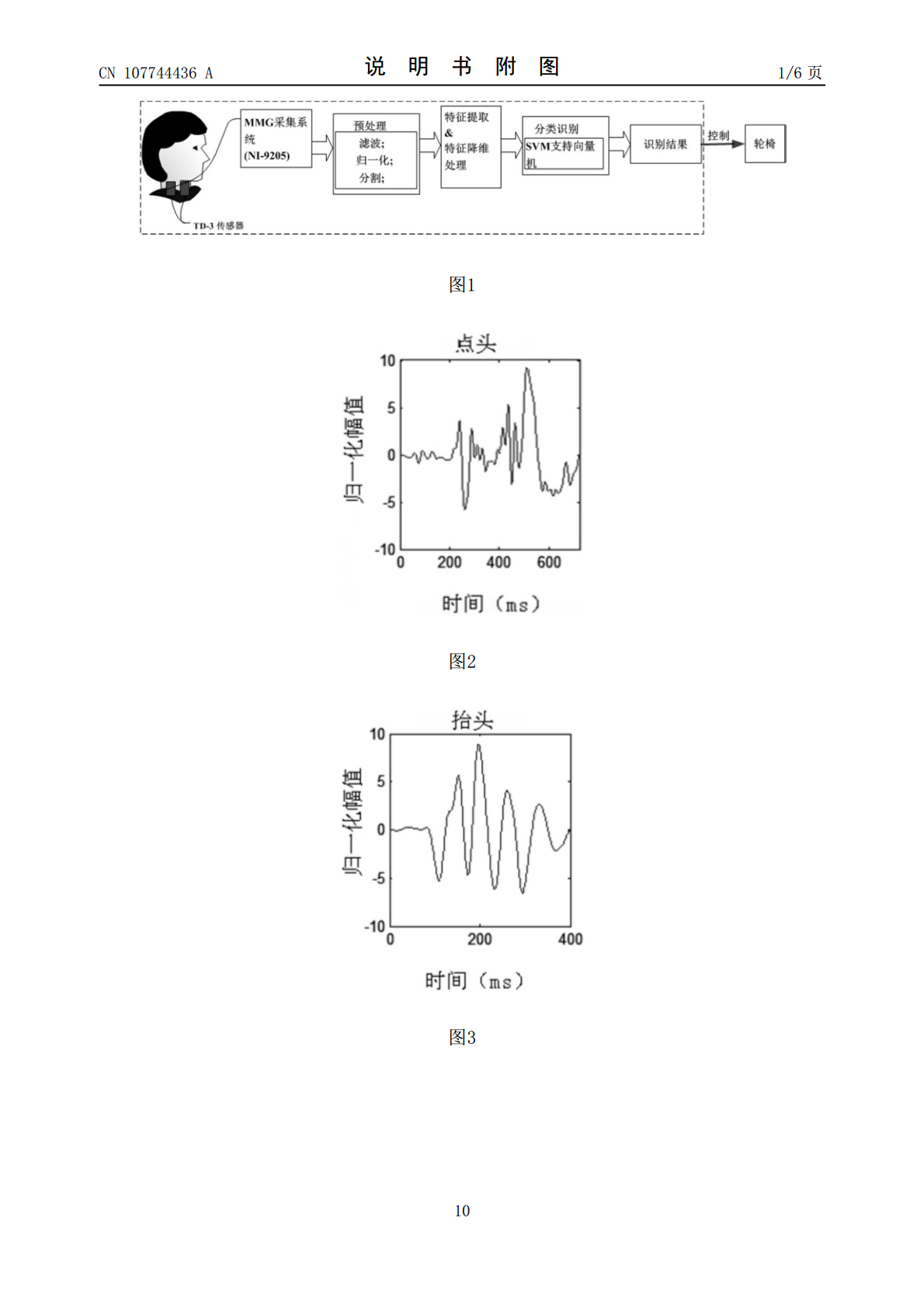
本发明涉及一种基于颈部肌音信号处理的轮椅控制方法及控制系统,控制方法包括以下步骤:通过传感器采集颈部肌音信号MMG,并输入至训练模型;利用训练模型对颈部肌音信号MMG进行信号预处理、分割、特征提取、降维处理和头部动作指令信号分类识别;将识别出的头部动作指令信号传至轮椅控制器,控制轮椅运行。特征提取包括小波包变换系数能量特征提取和主对角切片特征提取。指令信号包括六种控制模式:分别为向前、向左、向右、向后、加速和停止指令。与现有技术相比,本发明具有MMG传感器使用方便、信号识别准确、更多的轮椅控制模式、传感器

一种肩颈部肌电信号识别的智能轮椅控制方法.docx
一种肩颈部肌电信号识别的智能轮椅控制方法近年来,随着科技的不断发展,智能轮椅越来越受到人们的关注。智能轮椅作为一种辅助工具,为肢体不便的人提供了更多的便利和自主性。然而,由于肌肉疾病导致的肢体不便致使患者肢体功能障碍甚至无法正常使用手柄对轮椅进行控制,从而导致他们对生活质量的影响。此时,肌电信号识别技术就显得十分重要,可以通过肌电信号识别对使用者的肌肉电活动进行监测,形成信号并传输到智能轮椅系统中,达到智能控制轮椅的目的。肌电信号识别技术是指分析肌肉的电活动并将其转换为控制信号的技术。这种技术既可用于运动

基于头皮和表面肌电信号假手控制系统.docx
基于头皮和表面肌电信号假手控制系统标题:基于头皮和表面肌电信号的假手控制系统摘要:随着科技的快速发展,假肢技术逐步从传统的机械结构向智能化、无创的方向发展。本文针对假手控制系统的研究进行探讨,提出基于头皮和表面肌电信号的假手控制系统的设计和实现。该系统通过从头皮和肌肉中获取信号,实时分析和处理,最终实现对假手的自然、精准、无创操控。文章首先介绍头皮和表面肌电信号的基本原理和获取方法,然后阐述了假手控制系统的设计思路和流程,包括信号采集、信号分析和识别、假手控制等关键环节。最后,对该系统进行性能评估和展望,

基于肌电和加速度自适应控制的智能轮椅控制系统.pdf
本发明公开了一种基于肌电和加速度自适应控制的智能轮椅控制系统,包括信号获取模块,信号处理模块和无线通信模块;信号获取模块包括肌电信号采集单元和加速度信号采集单元,利用肌电信号采集单元同步采集获得人体前臂的伸指总肌、尺侧腕伸肌和肱桡肌的表面肌电信号,利用加速度信号采集单元采集获得人体前臂的加速度信号。本发明以手势动作代替接触式控制方式,能有效提高人机交互体验质量和康复人群的康复积极性。

一种基于肌电信号的运动控制方法及其系统.pdf
本发明公开了一种基于肌电信号的运动控制方法及其系统,包括:采集肌体的肌电信号;对所述肌电信号进行调理滤波生成滤波信号;获取预训练的动作匹配模型,将所述滤波信号输入所述动作匹配模型生成动作预测结果;基于所述动作预测结果输出运动控制指令至动作执行单元。本发明通过按照环绕同一目标肌群的方式采集多组运动肌电信号,能够生成以采集时间、肌电信号值和贴敷电极编号为三类参数的三维肌电分布特征,从而准确表征用户动作类型,在不产生额外算力负荷的情况下,有效提升控制单元输出的运动控制指令的准确性,解决了传统的基于肌电信号的运动