
基于可变感受野尺度全局调制的轮廓检测方法.pdf

一吃****瀚文


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于可变感受野尺度全局调制的轮廓检测方法.pdf
本发明旨在提供一种基于可变感受野尺度全局调制的轮廓检测方法,包括以下步骤:A、输入经灰度处理的待检测图像,计算得到各像素点的归一化高斯差分滤波值;B、预设尺度函数的高尺度值、低尺度值、阈值,将各像素点的归一化高斯差分滤波值分别与阈值进行对比,确定各像素点的尺度函数值;C、预设抑制强度及均分圆周的多个方向参数;对待检测图像中的各像素点分别按照各方向参数进行Gabor滤波,计算各像素点的经典感受野刺激响应;D、计算各像素点的抑制响应;E、将各像素点的经典感受野刺激响应与抑制响应计算得到该像素点的轮廓响应并处理

基于非经典感受野空间总和调制的轮廓检测方法.pdf
本发明旨在提供一种基于非经典感受野空间总和调制的轮廓检测方法,包括以下步骤:A、输入经灰度处理的待检测图像;B、对待检测图像Gabor滤波,获得各像素点的各个方向的Gabor能量值;C、计算出非经典感受野对中心神经元的空间总和调制权值;D、计算出非经典感受野在距离权值上对中心神经元的调制响应;E、计算得到中心神经元受非经典感受野的刺激响应;F、计算得到中心神经元受经典感受野和非经典感受野联合调制的刺激响应,作为对应的轮廓值;G、对各像素点的轮廓值使用非极大值抑制和双阈值处理,得到各像素点的最终轮廓值。该方
基于非经典感受野和线性非线性调制的轮廓检测方法.pdf
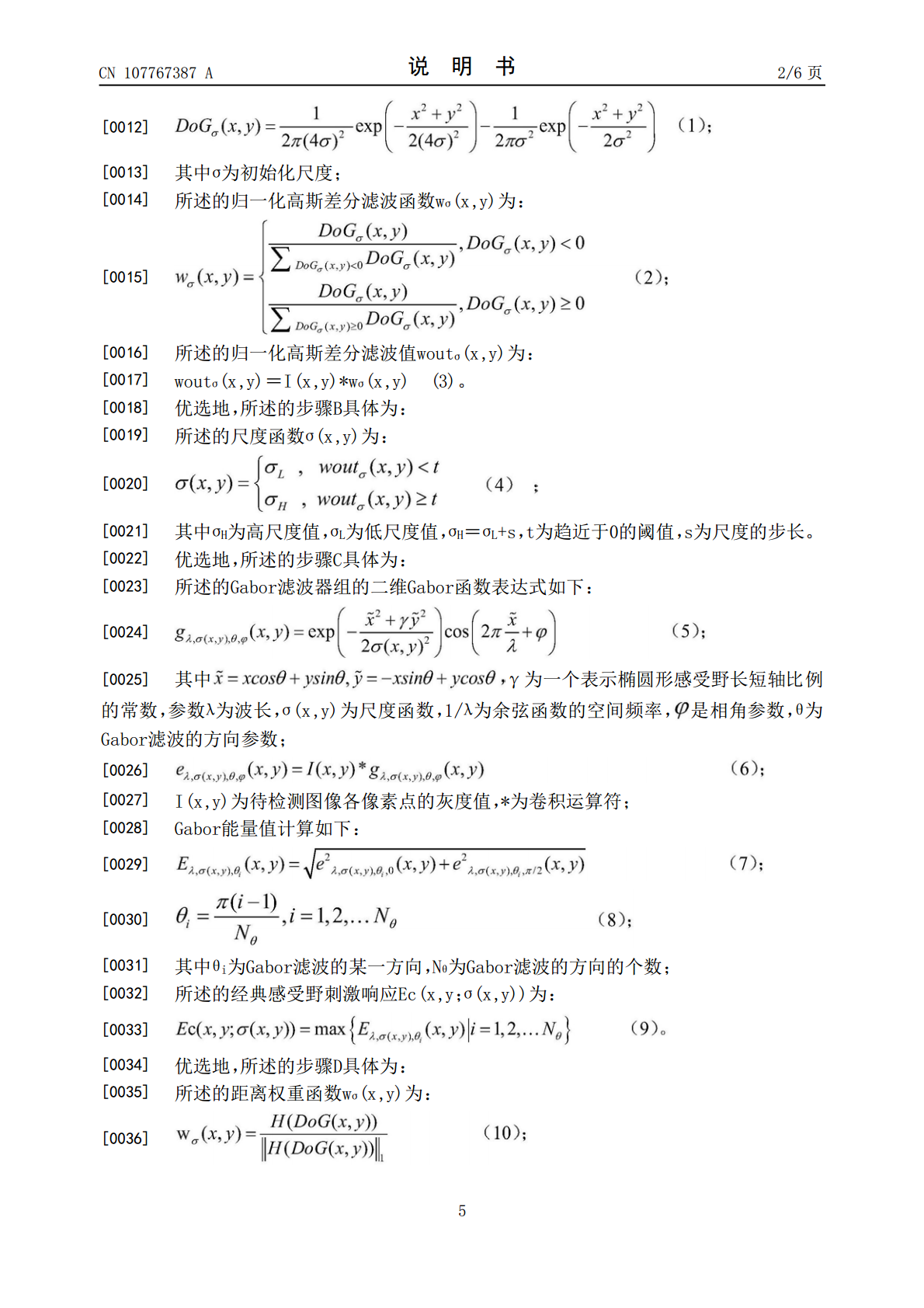
本发明提供基于非经典感受野和线性非线性调制的轮廓检测方法,包括:A、输入经灰度处理的待检测图像;B、对待检测图像进行Gabor滤波得到各像素点的各方向的Gabor能量值;C、构建视网膜神经节细胞中的X细胞和Y细胞仿真模型;D、计算得到X细胞对应的各个中心神经元受非经典感受野的刺激响应;E、计算得到Y细胞对应的各个中心神经元受非经典感受野的刺激响应;F、分别计算出X、Y细胞的中心神经元受经典感受野和非经典感受野联合调制的刺激响应,相加后作为对应的轮廓值;G、对各像素点的轮廓值进行处理得到最终轮廓值。该方法克

基于颜色拮抗感受野的轮廓检测方法.pdf
本发明旨在提供基于颜色拮抗感受野的轮廓检测方法,包括以下步骤:A、输入待检测图像,提取红、绿、蓝、黄分量;B、预设红绿、蓝黄两个颜色组合及对应的通道,计算各自的单拮抗响应;C、预设均分圆周的多个方向参数,构建对应各个方向参数的双拮抗感受野滤波器模板;对于各像素点计算该像素点的各通道的双拮抗响应;D、对于各像素点计算各通道的两个双拮抗抑制轮廓响应;E、对于各像素点:将各通道全部的双拮抗抑制轮廓响应进行归一化后,所得结果的最大值即为该像素点的最终轮廓响应。该方法克服现有技术缺陷,具有检测效果好、计算效率高的特

一种基于组合感受野和朝向特征调制的轮廓检测方法.pdf
本发明公开了一种基于组合感受野和朝向特征调制的轮廓检测方法,属于图像处理领域。本发明方法步骤包括:首先计算外侧膝状体细胞感受野的响应;之后构建不同边缘朝向对应的亚单元;再求简单细胞感受野在特定朝向下的响应;然后求简单细胞感受野响应;再使用经过半波校正的高斯差分函数(DOG函数)描述非经典感受野;计算非经典感受野的各向同性抑制;再计算经典感受野与非经典感受野的朝向差异,得到朝向特征差异调制下的抑制程度;最后通过非极大值抑制细化轮廓,进行滞后门限处理得到二值化的轮廓图。采用本发明方法提高了轮廓与边界检测算法性