
一种自动化多工位运输设备.pdf

是你****嘉嘉

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动化多工位运输设备.pdf
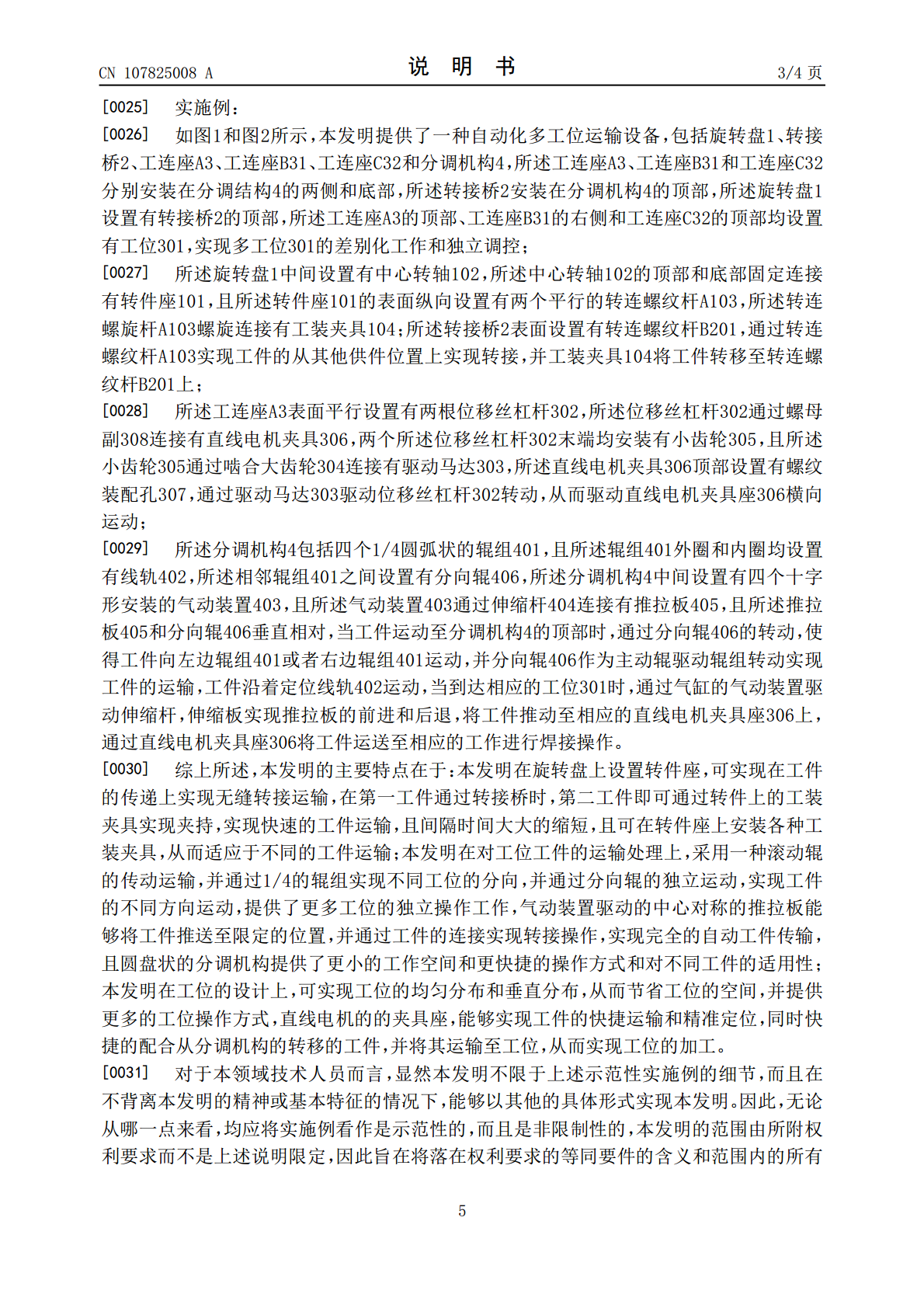
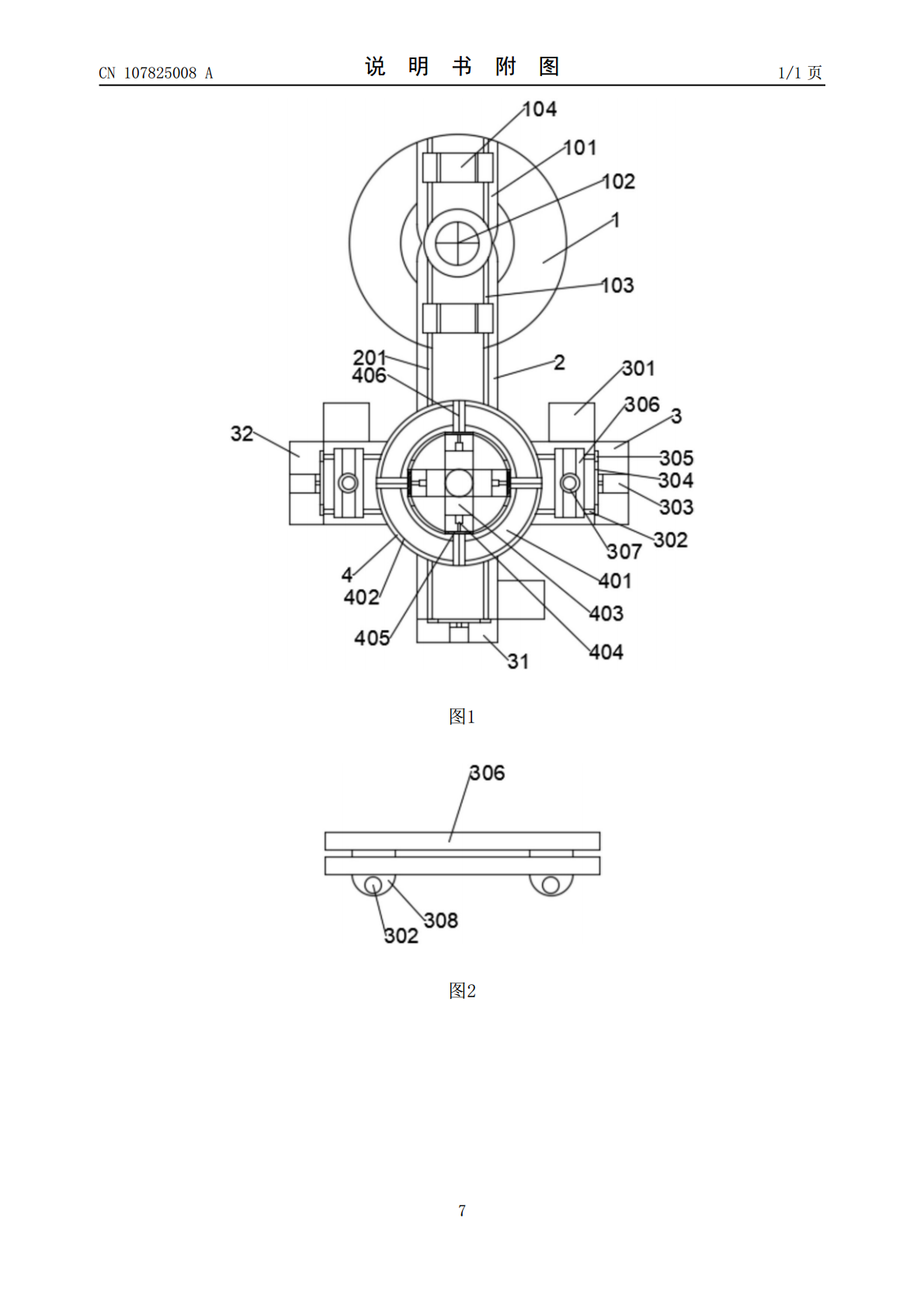
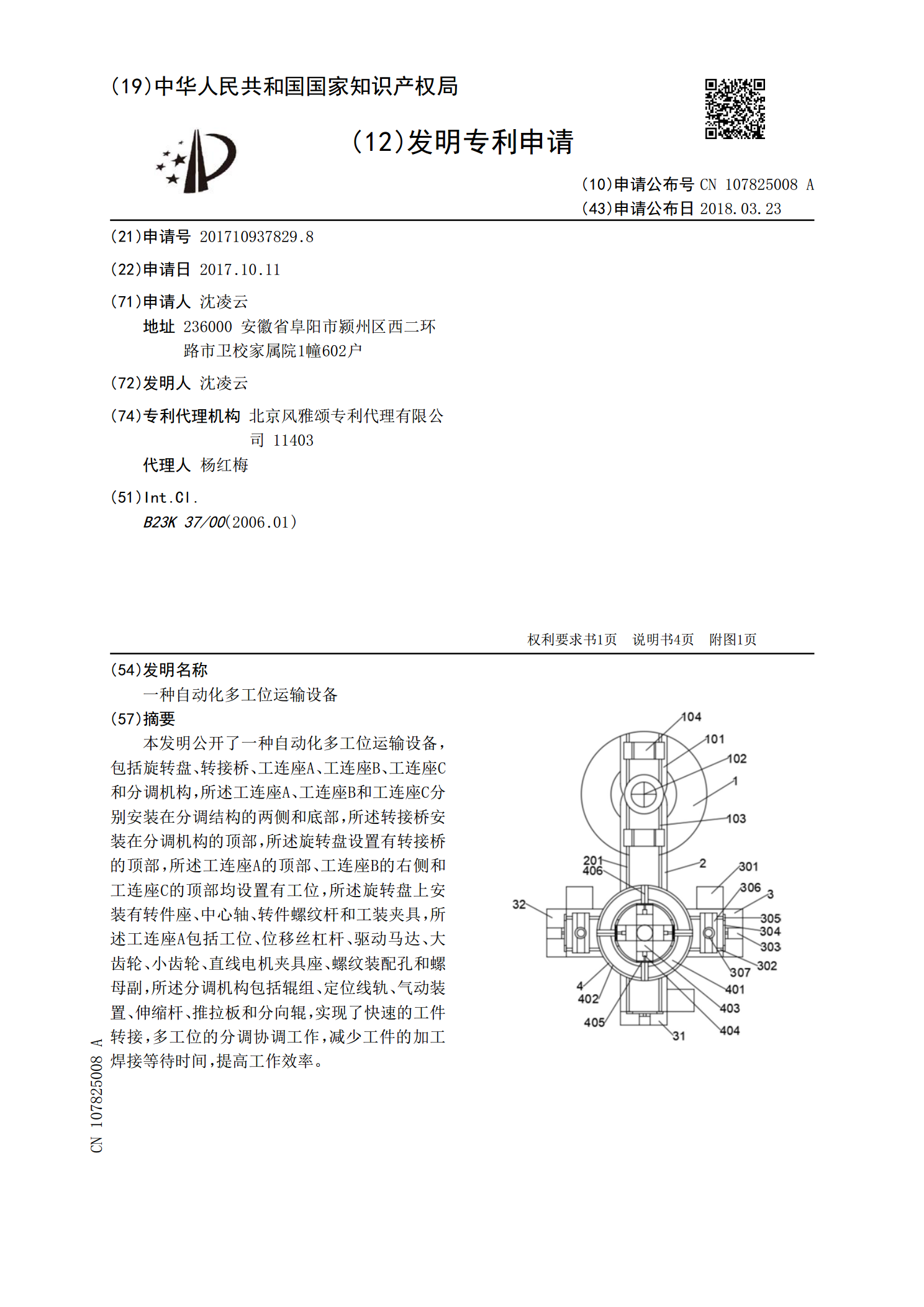
本发明公开了一种自动化多工位运输设备,包括旋转盘、转接桥、工连座A、工连座B、工连座C和分调机构,所述工连座A、工连座B和工连座C分别安装在分调结构的两侧和底部,所述转接桥安装在分调机构的顶部,所述旋转盘设置有转接桥的顶部,所述工连座A的顶部、工连座B的右侧和工连座C的顶部均设置有工位,所述旋转盘上安装有转件座、中心轴、转件螺纹杆和工装夹具,所述工连座A包括工位、位移丝杠杆、驱动马达、大齿轮、小齿轮、直线电机夹具座、螺纹装配孔和螺母副,所述分调机构包括辊组、定位线轨、气动装置、伸缩杆、推拉板和分向辊,实现
一种自动化多工位精密加工中心.pdf
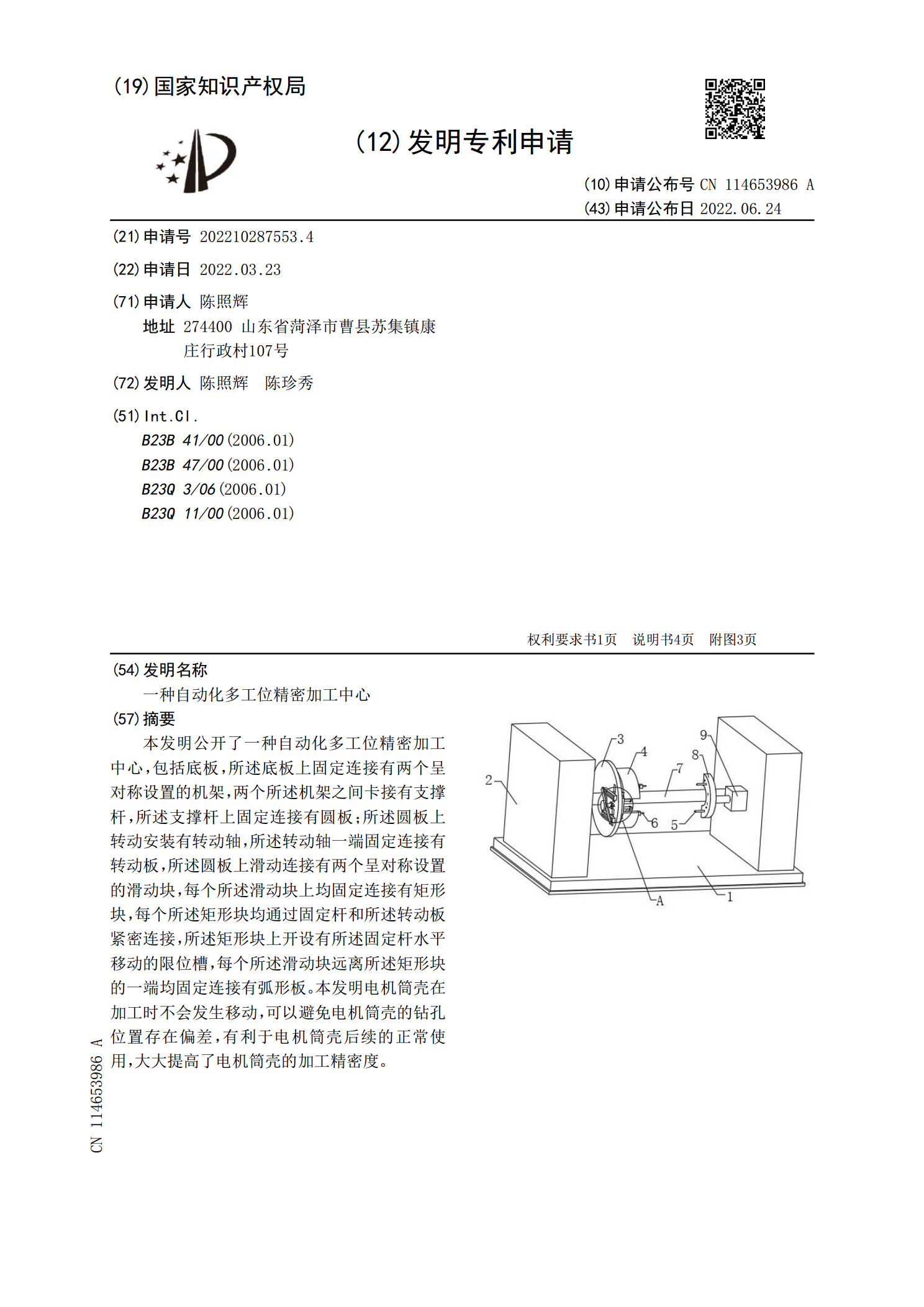
本发明公开了一种自动化多工位精密加工中心,包括底板,所述底板上固定连接有两个呈对称设置的机架,两个所述机架之间卡接有支撑杆,所述支撑杆上固定连接有圆板;所述圆板上转动安装有转动轴,所述转动轴一端固定连接有转动板,所述圆板上滑动连接有两个呈对称设置的滑动块,每个所述滑动块上均固定连接有矩形块,每个所述矩形块均通过固定杆和所述转动板紧密连接,所述矩形块上开设有所述固定杆水平移动的限位槽,每个所述滑动块远离所述矩形块的一端均固定连接有弧形板。本发明电机筒壳在加工时不会发生移动,可以避免电机筒壳的钻孔位置存在偏差
一种自动化多工位螺丝上料机构.pdf
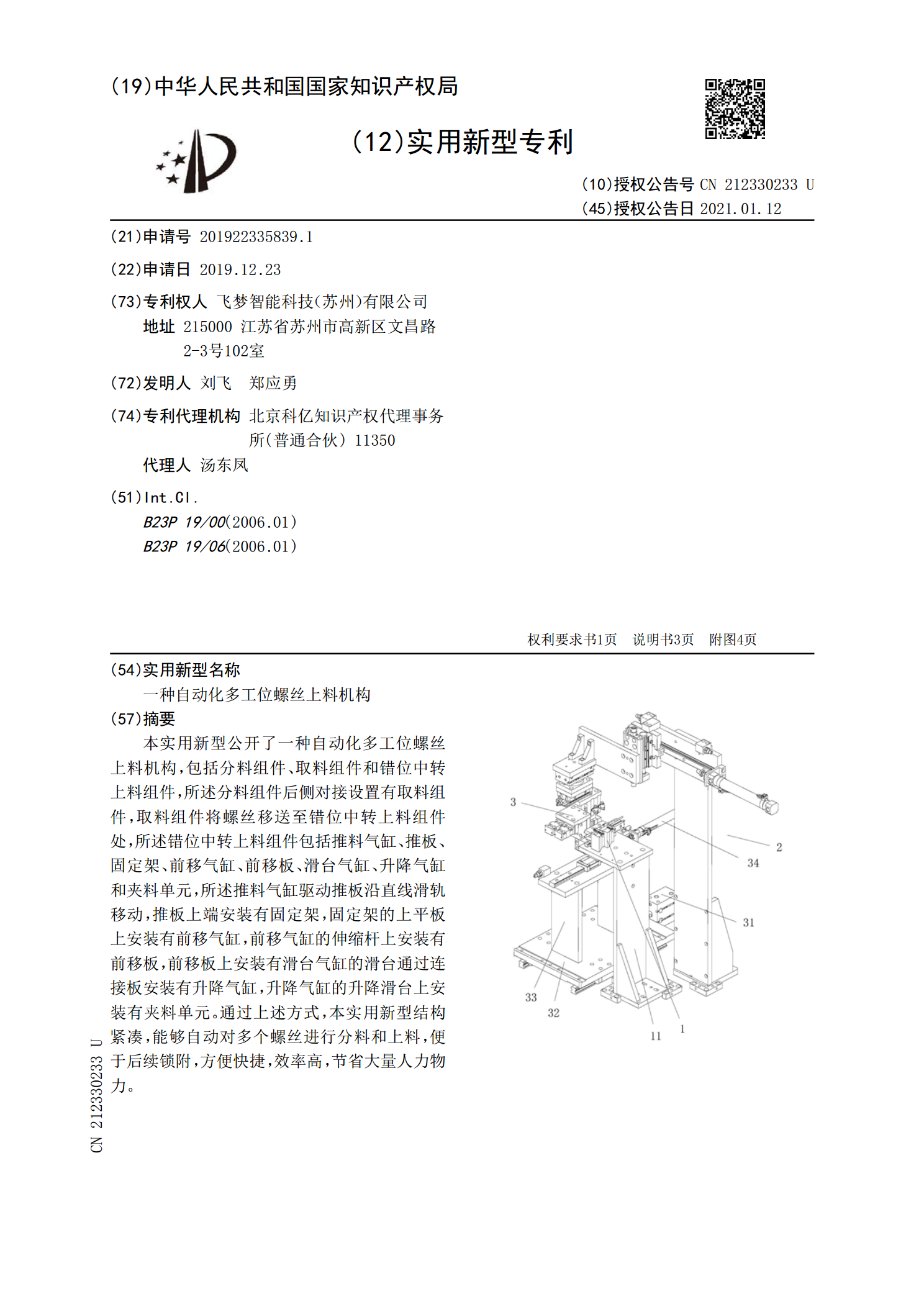
本实用新型公开了一种自动化多工位螺丝上料机构,包括分料组件、取料组件和错位中转上料组件,所述分料组件后侧对接设置有取料组件,取料组件将螺丝移送至错位中转上料组件处,所述错位中转上料组件包括推料气缸、推板、固定架、前移气缸、前移板、滑台气缸、升降气缸和夹料单元,所述推料气缸驱动推板沿直线滑轨移动,推板上端安装有固定架,固定架的上平板上安装有前移气缸,前移气缸的伸缩杆上安装有前移板,前移板上安装有滑台气缸的滑台通过连接板安装有升降气缸,升降气缸的升降滑台上安装有夹料单元。通过上述方式,本实用新型结构紧凑,能够
一种自动化多工位精密加工装置.pdf
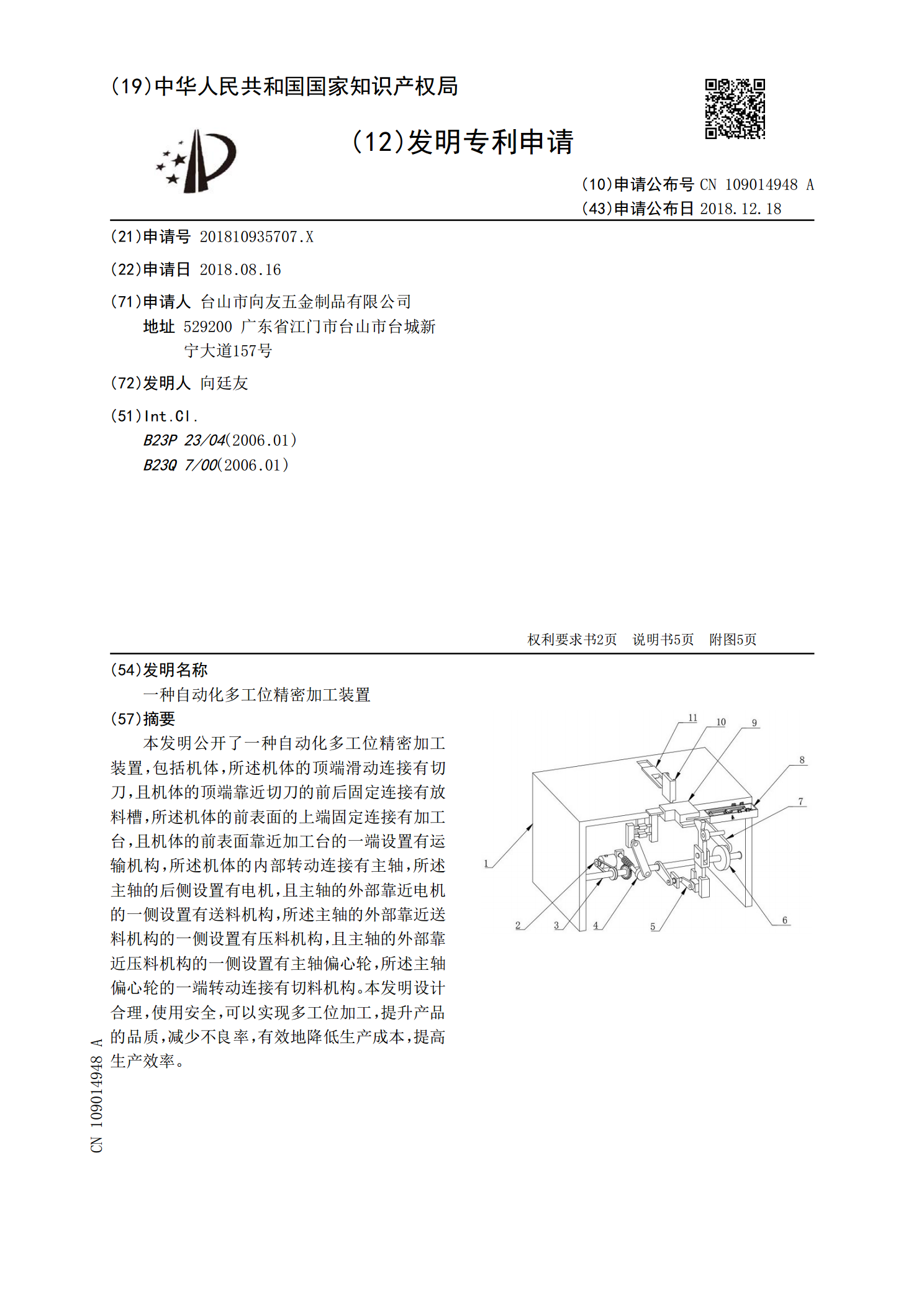
本发明公开了一种自动化多工位精密加工装置,包括机体,所述机体的顶端滑动连接有切刀,且机体的顶端靠近切刀的前后固定连接有放料槽,所述机体的前表面的上端固定连接有加工台,且机体的前表面靠近加工台的一端设置有运输机构,所述机体的内部转动连接有主轴,所述主轴的后侧设置有电机,且主轴的外部靠近电机的一侧设置有送料机构,所述主轴的外部靠近送料机构的一侧设置有压料机构,且主轴的外部靠近压料机构的一侧设置有主轴偏心轮,所述主轴偏心轮的一端转动连接有切料机构。本发明设计合理,使用安全,可以实现多工位加工,提升产品的品质,减
一种多工位激光焊接自动化成套设备.pdf
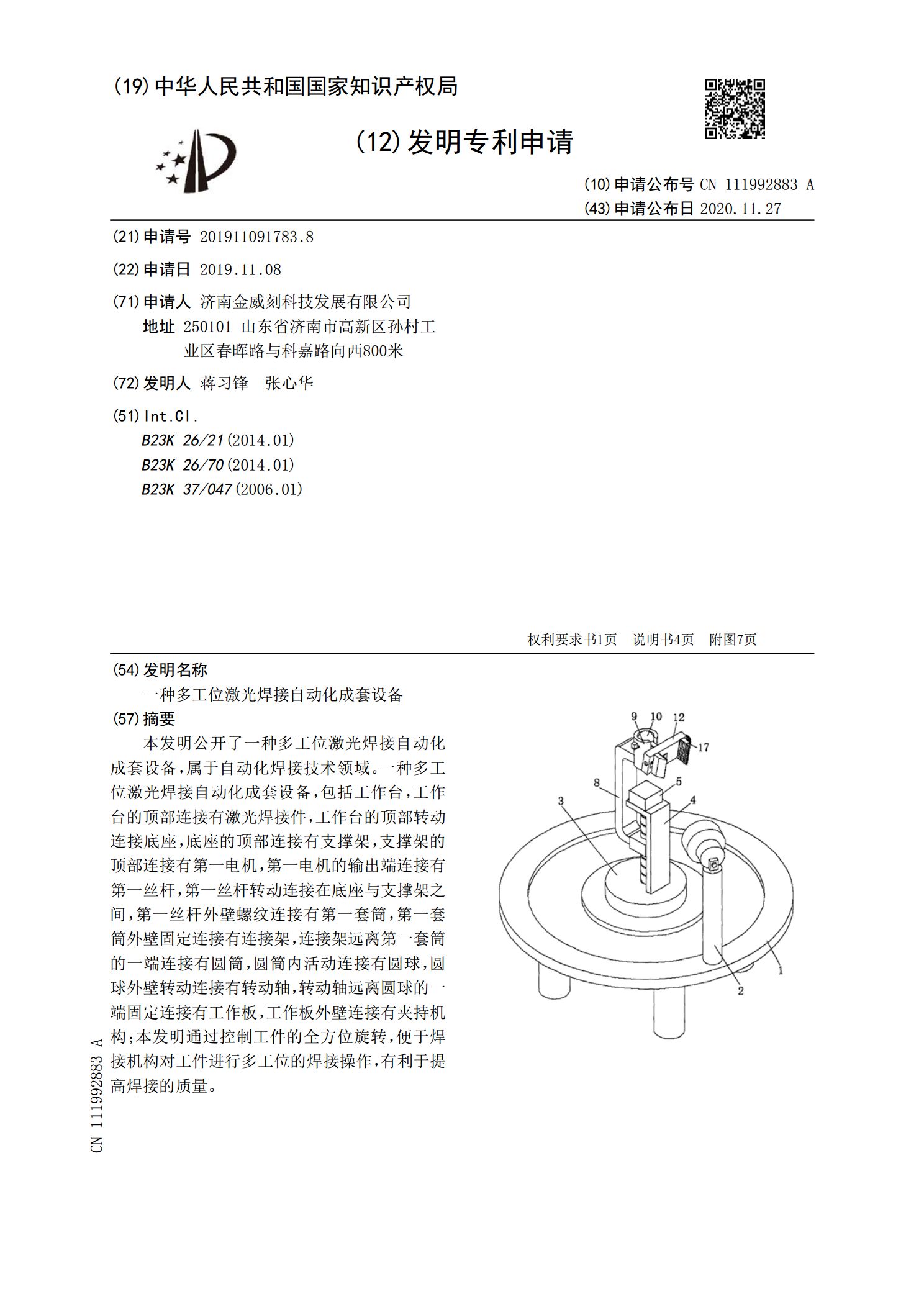
本发明公开了一种多工位激光焊接自动化成套设备,属于自动化焊接技术领域。一种多工位激光焊接自动化成套设备,包括工作台,工作台的顶部连接有激光焊接件,工作台的顶部转动连接底座,底座的顶部连接有支撑架,支撑架的顶部连接有第一电机,第一电机的输出端连接有第一丝杆,第一丝杆转动连接在底座与支撑架之间,第一丝杆外壁螺纹连接有第一套筒,第一套筒外壁固定连接有连接架,连接架远离第一套筒的一端连接有圆筒,圆筒内活动连接有圆球,圆球外壁转动连接有转动轴,转动轴远离圆球的一端固定连接有工作板,工作板外壁连接有夹持机构;本发明通