
驾驶辅助装置以及驾驶辅助方法.pdf

Ja****44


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
驾驶辅助装置以及驾驶辅助方法.pdf
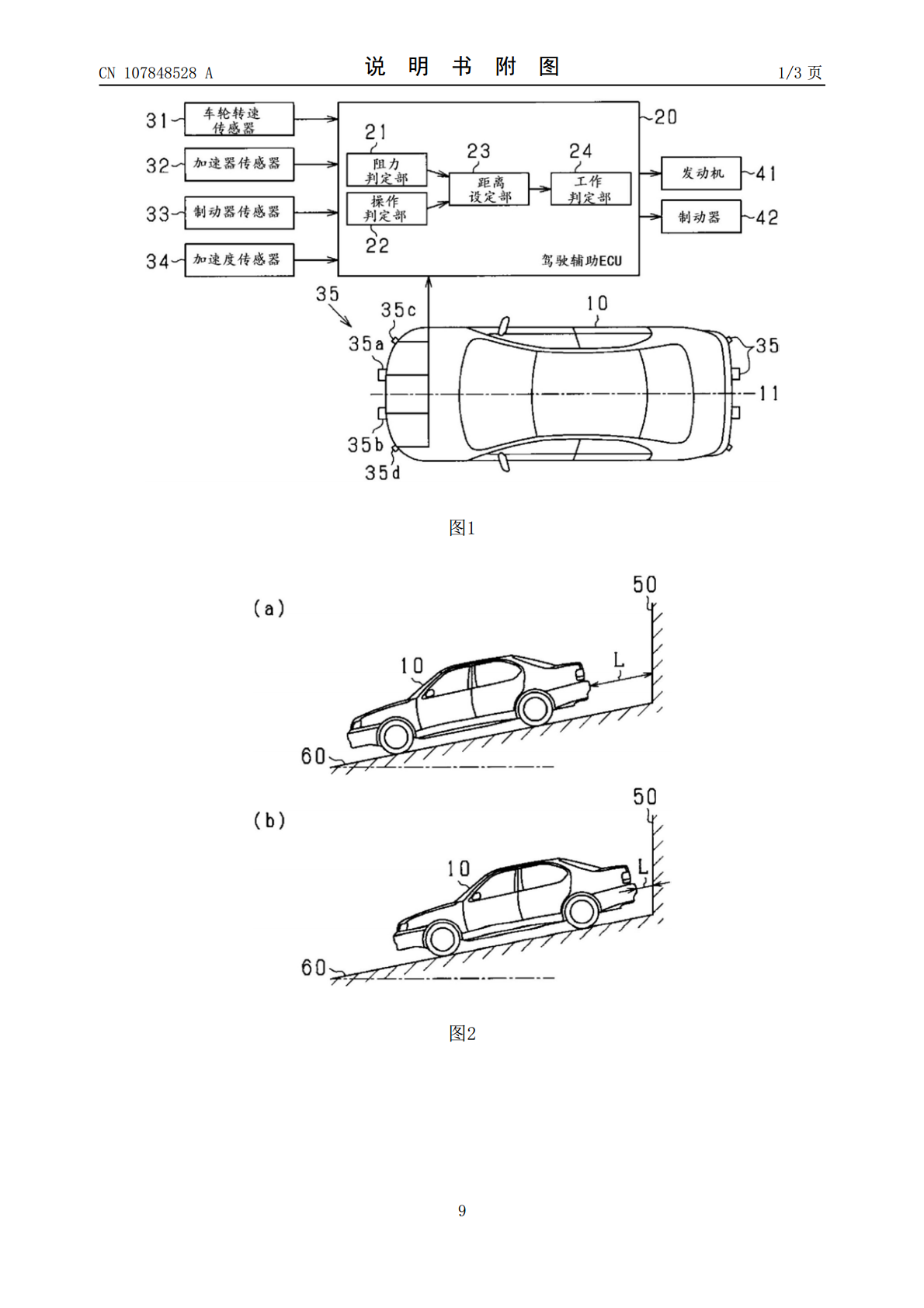
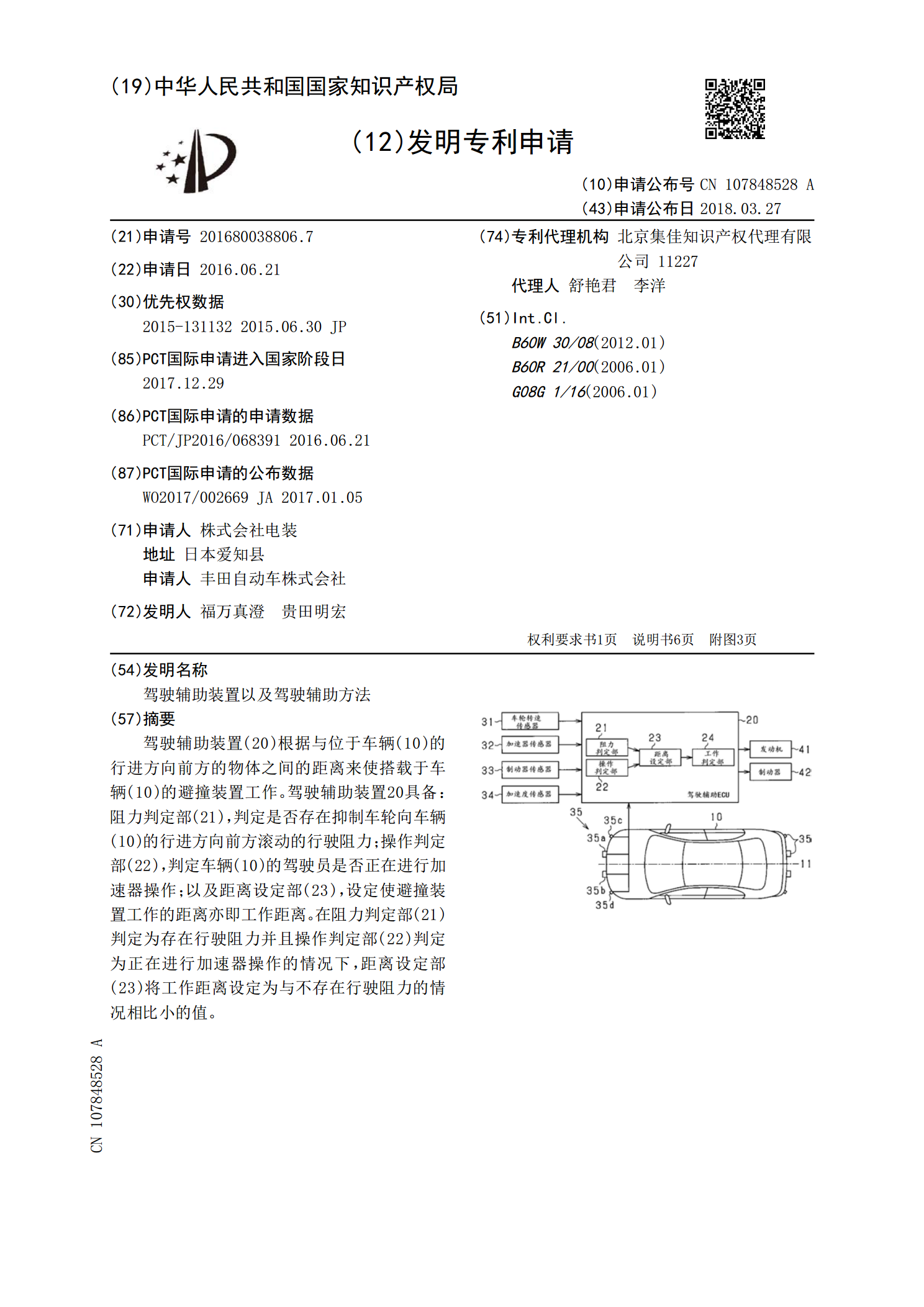
驾驶辅助装置(20)根据与位于车辆(10)的行进方向前方的物体之间的距离来使搭载于车辆(10)的避撞装置工作。驾驶辅助装置20具备:阻力判定部(21),判定是否存在抑制车轮向车辆(10)的行进方向前方滚动的行驶阻力;操作判定部(22),判定车辆(10)的驾驶员是否正在进行加速器操作;以及距离设定部(23),设定使避撞装置工作的距离亦即工作距离。在阻力判定部(21)判定为存在行驶阻力并且操作判定部(22)判定为正在进行加速器操作的情况下,距离设定部(23)将工作距离设定为与不存在行驶阻力的情况相比小的值。
驾驶辅助方法以及驾驶辅助装置.pdf
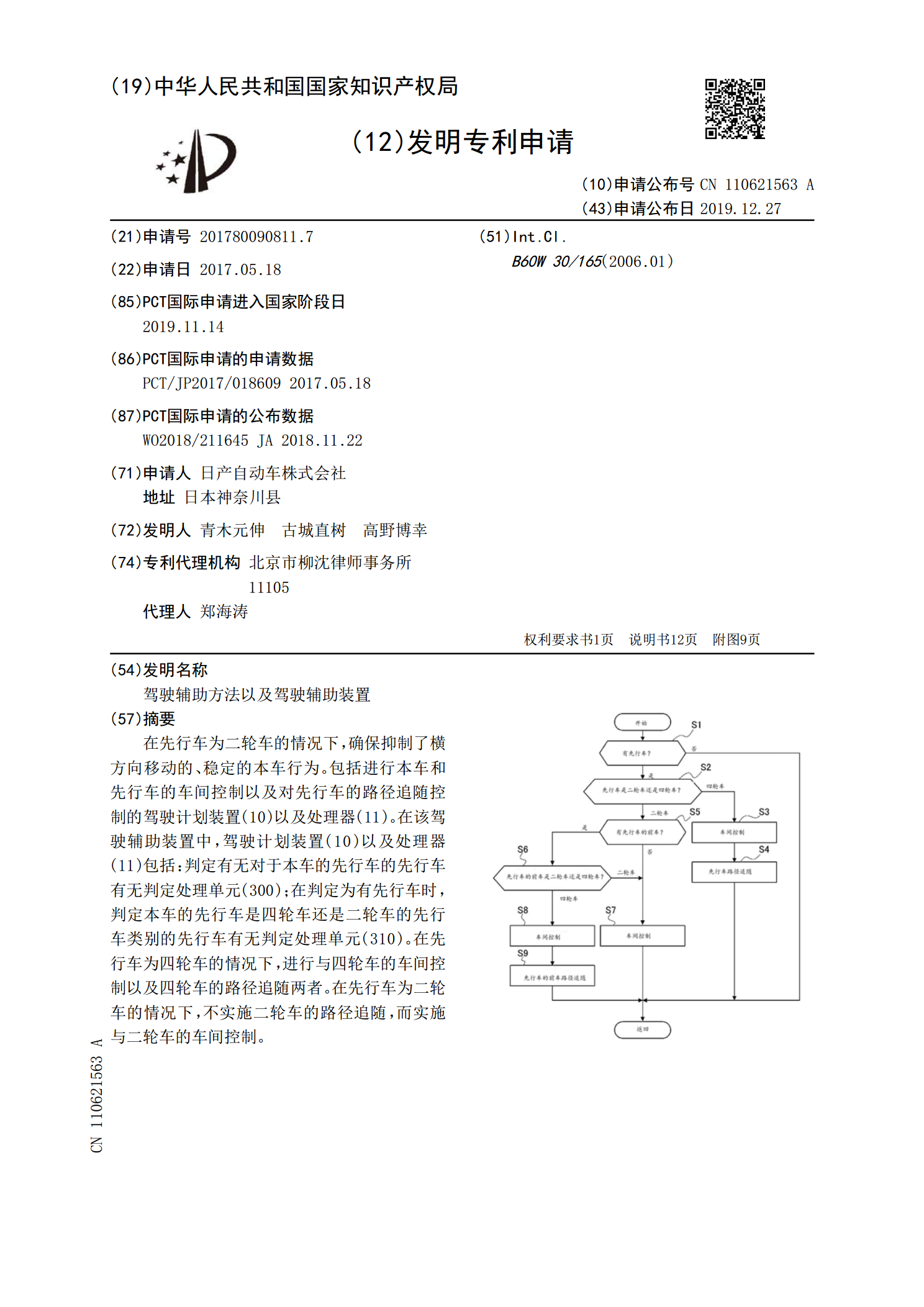
在先行车为二轮车的情况下,确保抑制了横方向移动的、稳定的本车行为。包括进行本车和先行车的车间控制以及对先行车的路径追随控制的驾驶计划装置(10)以及处理器(11)。在该驾驶辅助装置中,驾驶计划装置(10)以及处理器(11)包括:判定有无对于本车的先行车的先行车有无判定处理单元(300);在判定为有先行车时,判定本车的先行车是四轮车还是二轮车的先行车类别的先行车有无判定处理单元(310)。在先行车为四轮车的情况下,进行与四轮车的车间控制以及四轮车的路径追随两者。在先行车为二轮车的情况下,不实施二轮车的路径追
驾驶辅助方法以及驾驶辅助装置.pdf
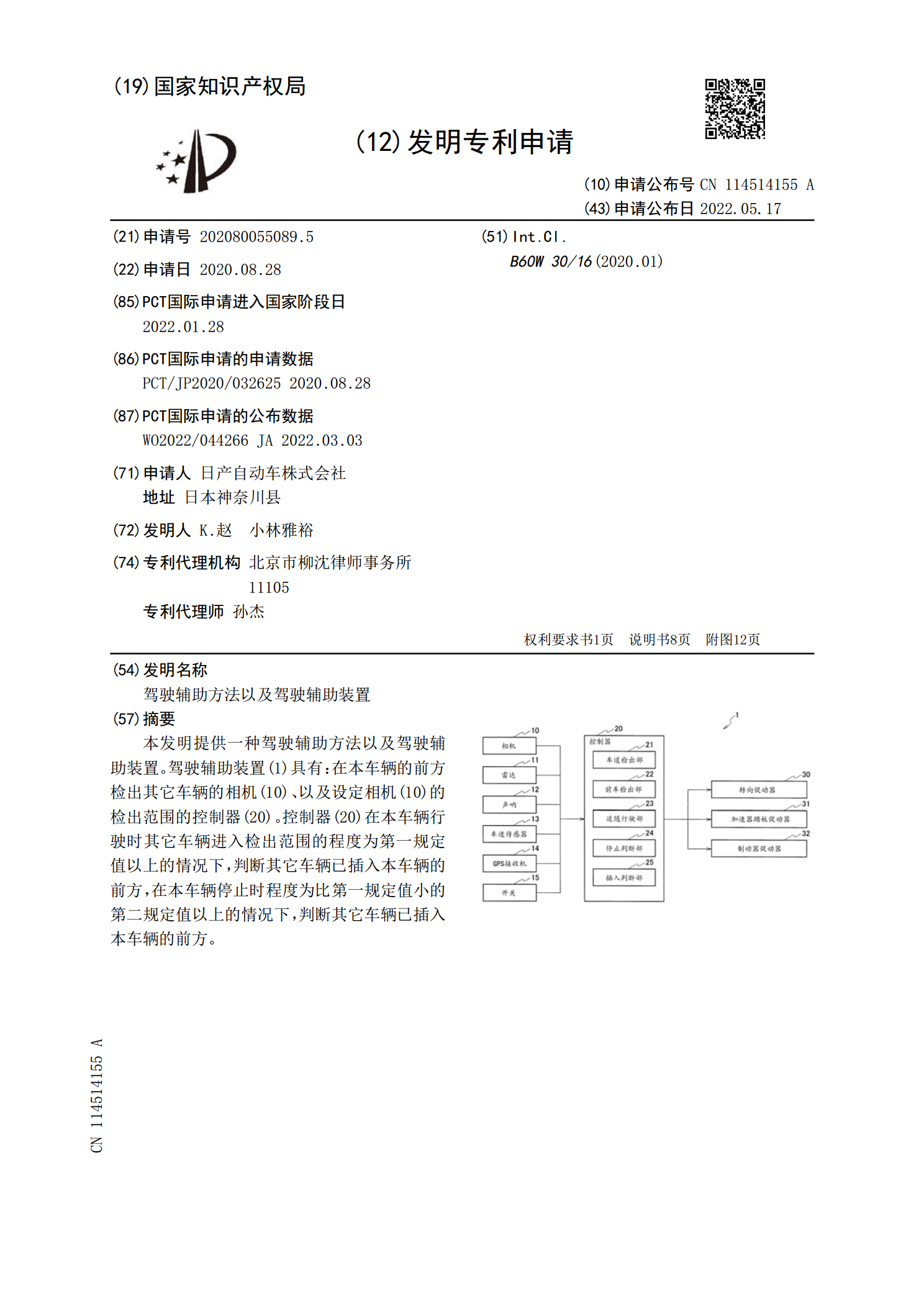
本发明提供一种驾驶辅助方法以及驾驶辅助装置。驾驶辅助装置(1)具有:在本车辆的前方检出其它车辆的相机(10)、以及设定相机(10)的检出范围的控制器(20)。控制器(20)在本车辆行驶时其它车辆进入检出范围的程度为第一规定值以上的情况下,判断其它车辆已插入本车辆的前方,在本车辆停止时程度为比第一规定值小的第二规定值以上的情况下,判断其它车辆已插入本车辆的前方。
驾驶辅助方法以及驾驶辅助装置.pdf
本发明提供一种驾驶辅助方法以及驾驶辅助装置。驾驶辅助装置(1)具有:在本车辆的前方检出其它车辆的相机(10)、以及设定相机(10)的检出范围的控制器(20)。控制器(20)在本车辆行驶时其它车辆进入检出范围的程度为第一规定值以上的情况下,判断其它车辆已插入本车辆的前方,在本车辆停止时程度为比第一规定值小的第二规定值以上的情况下,判断其它车辆已插入本车辆的前方。
驾驶辅助装置以及驾驶辅助程序.pdf
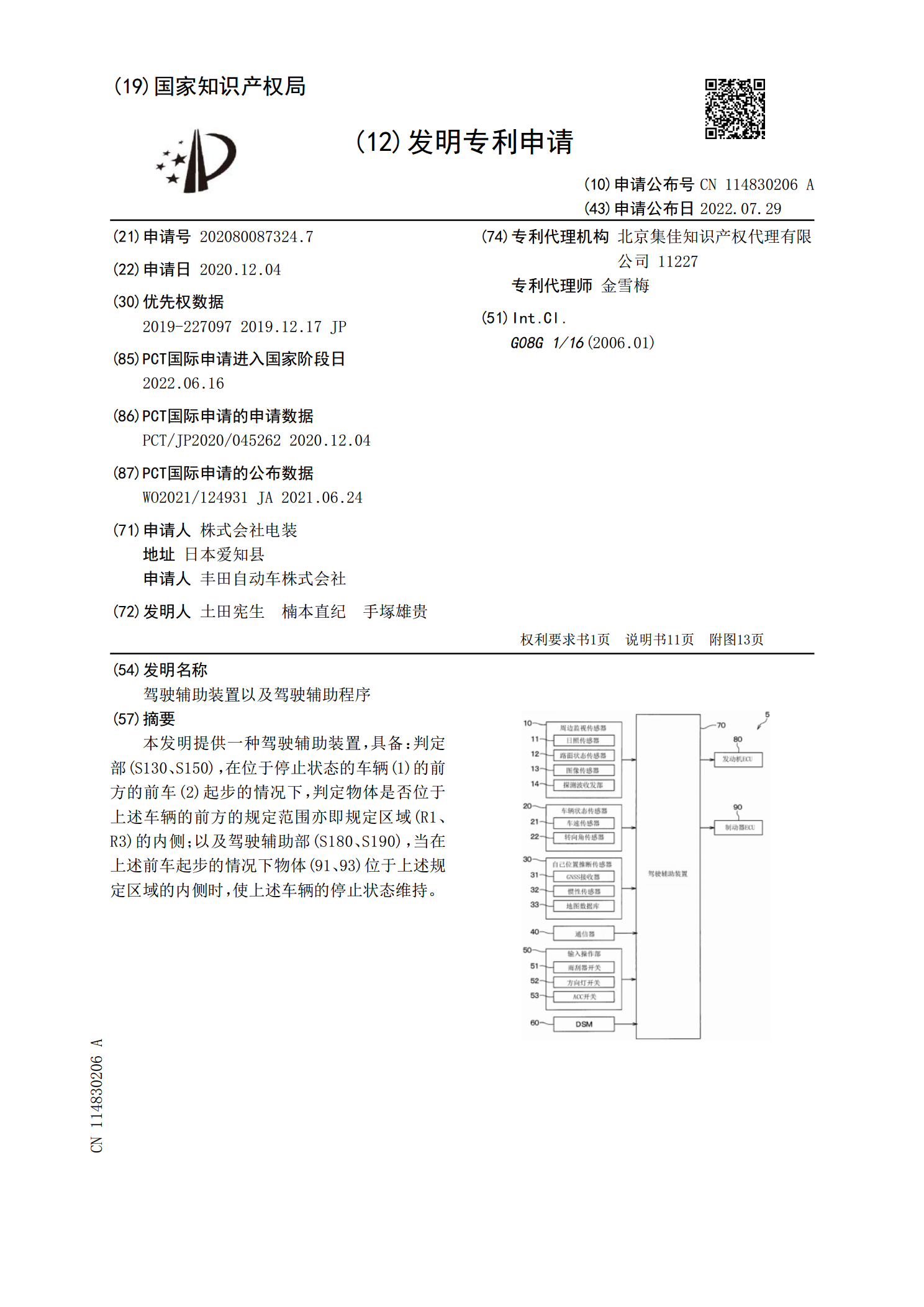
本发明提供一种驾驶辅助装置,具备:判定部(S130、S150),在位于停止状态的车辆(1)的前方的前车(2)起步的情况下,判定物体是否位于上述车辆的前方的规定范围亦即规定区域(R1、R3)的内侧;以及驾驶辅助部(S180、S190),当在上述前车起步的情况下物体(91、93)位于上述规定区域的内侧时,使上述车辆的停止状态维持。