
基于复眼结构的大视场定位技术及实验研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于复眼结构的大视场定位技术及实验研究的任务书.docx
基于复眼结构的大视场定位技术及实验研究的任务书任务书:基于复眼结构的大视场定位技术及实验研究1.研究背景随着无人机、机器人等智能设备的广泛应用,对于这些设备进行定位与导航的需求不断增加。然而,传统的单目相机等设备具有视场狭窄、深度感知能力有限等缺点,不能满足大视场、高精度的定位需求。因此,开发一种能够实现大视场、高灵敏度的定位技术非常有意义。复眼是某些昆虫和节肢动物的视觉器官,由多个小孔组成,类似于相机的镜头,可以对周围环境实现全方位、高灵敏度的感知。复眼结构灵活可靠,在工程应用中具有潜在的实用价值。因此

大视场复眼结构图像处理算法研究.docx
大视场复眼结构图像处理算法研究大视场复眼结构图像处理算法研究摘要:大视场复眼是昆虫和某些其他节肢动物的一种视觉器官,具有多个重叠的小视野,可以提供广阔的视野。由于其特殊的结构和功能,大视场复眼在图像处理算法中具有独特的挑战。本文研究大视场复眼的结构和功能,并提出了一种基于图像处理的算法以准确地处理大视场复眼中的图像。关键词:大视场复眼、结构、图像处理算法1.引言大视场复眼是昆虫和某些其他节肢动物的一种特殊的视觉器官,它们具有数百个重叠的小视野,可以提供广阔的视野覆盖范围。大视场复眼的结构和功能在昆虫的生物

视场拼接复眼成像系统结构及装调方法.docx
视场拼接复眼成像系统结构及装调方法视场拼接复眼成像系统结构及装调方法摘要:随着科学技术的发展,对于高分辨率和大视场的图像需求越来越高。复眼成像系统因其具有大视场和高分辨率的特点而备受关注。本论文将介绍复眼成像系统的结构和装调方法,以及相关的研究进展和应用前景。一、引言:1.复眼成像系统概述:复眼成像系统是模仿昆虫复眼的视觉特性,通过多个成像单元组成的成像系统,具有大视场和高分辨率的特点。2.复眼成像系统的应用领域:复眼成像系统在无人机、机器人视觉、虚拟现实等领域有着广泛的应用前景。二、复眼成像系统的结构:
多层曲面复眼式180°大视场成像系统.pdf
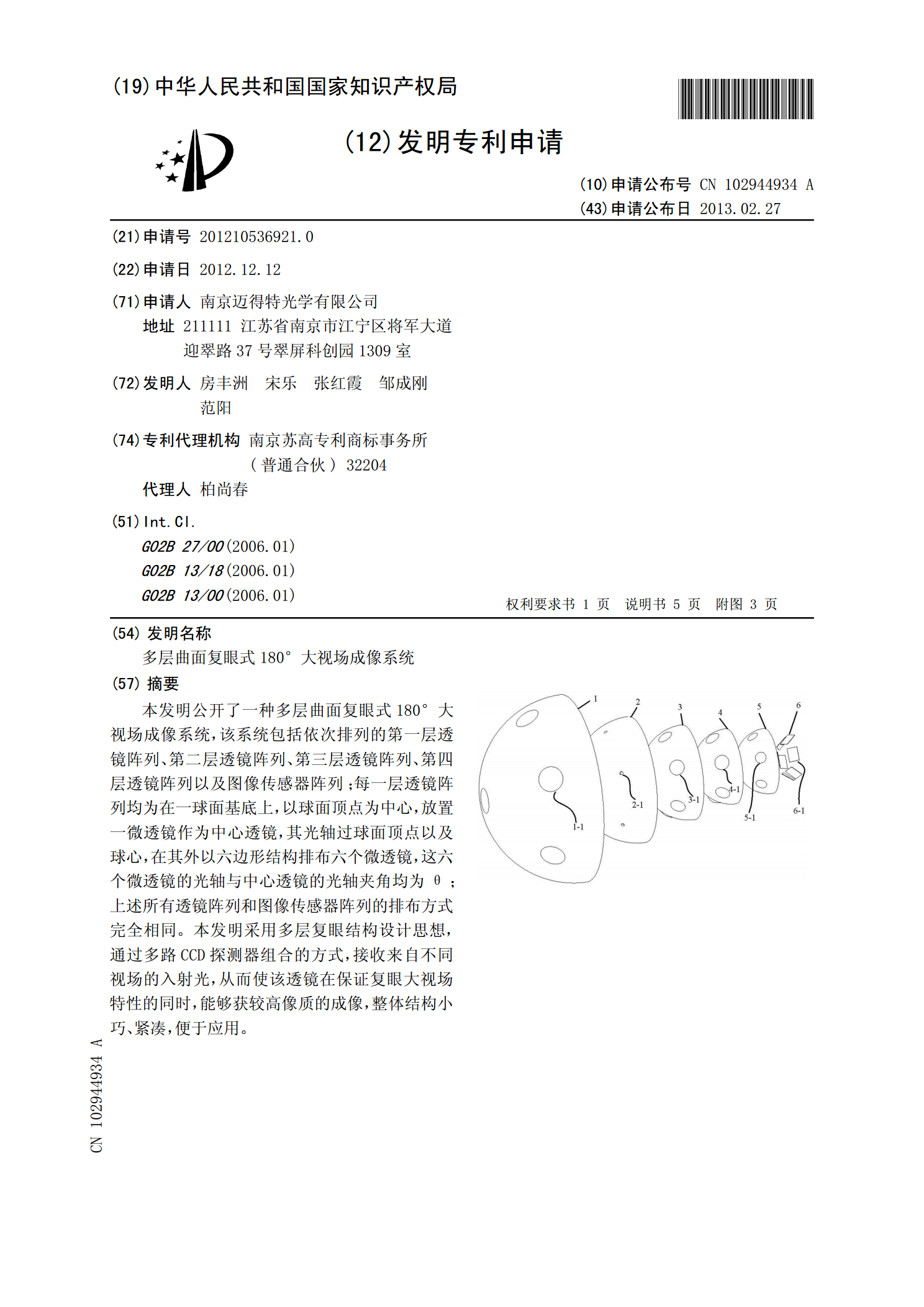
本发明公开了一种多层曲面复眼式180°大视场成像系统,该系统包括依次排列的第一层透镜阵列、第二层透镜阵列、第三层透镜阵列、第四层透镜阵列以及图像传感器阵列;每一层透镜阵列均为在一球面基底上,以球面顶点为中心,放置一微透镜作为中心透镜,其光轴过球面顶点以及球心,在其外以六边形结构排布六个微透镜,这六个微透镜的光轴与中心透镜的光轴夹角均为θ;上述所有透镜阵列和图像传感器阵列的排布方式完全相同。本发明采用多层复眼结构设计思想,通过多路CCD探测器组合的方式,接收来自不同视场的入射光,从而使该透镜在保证复眼大视场

基于双视场目标跟踪定位技术.docx
基于双视场目标跟踪定位技术双视场目标跟踪定位技术的研究摘要:随着计算机视觉技术的发展,目标跟踪定位技术成为了一个热门的研究领域。双视场目标跟踪定位技术以其具有一定的实时性和准确性等特点,被广泛应用于多个领域。本文主要探讨了双视场目标跟踪定位技术的原理和方法,并分析了其在实际应用中可能会遇到的挑战和解决方案。研究结果表明,双视场目标跟踪定位技术在实践中取得了较好的效果,并且具有较大的应用潜力。关键词:双视场、目标跟踪、定位、实时性、准确性一、引言目标跟踪技术是计算机视觉中的一个重要研究领域,通过对连续帧图像